
STM32cubeMX將STM32F767+LAN8720+LwIP+FreeRTOS的乙太網實現
通過STM32cubeMX將STM32F767+LAN8720+LwIP+FreeRTOS的乙太網實現
本文使用了正點原子的阿波羅開發板,接下來我將粗略的對STM32F767通過STM32cubeMX進行乙太網協議配置。
具體步驟
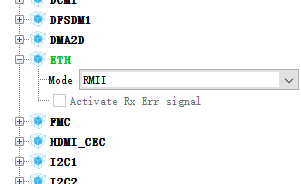
1.首先使能ETH,模式選擇RMII;
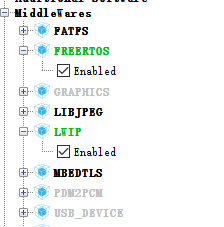
2.使能LWIP和FREERTOS;
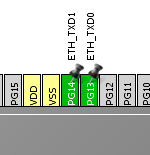
因為阿波羅的開發板PHY晶片的ETH_DXT1和ETH_DXT0用的是PG13,PG14引腳,和預設的不同,所以這裡改一下
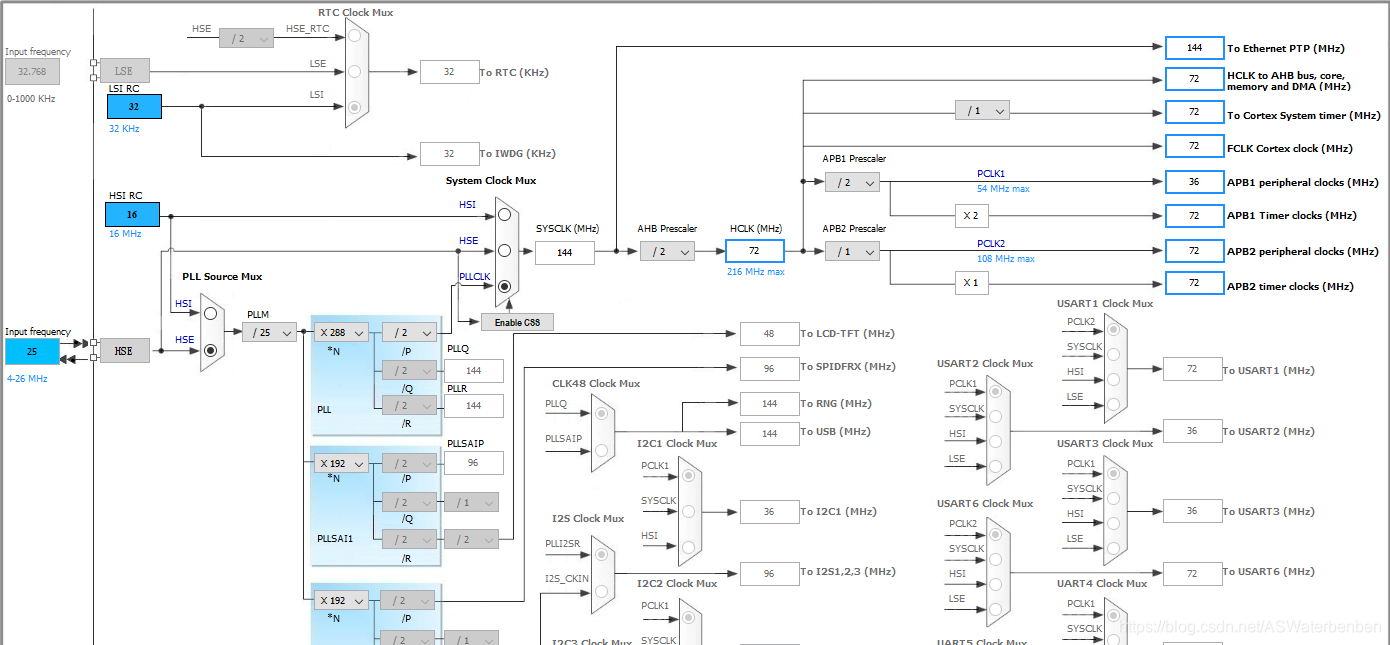
3.配置時鐘,在這裡我放上我自己的時鐘配置圖,只要不標紅就行,我用的是25MHz外部晶振作時鐘源 ;
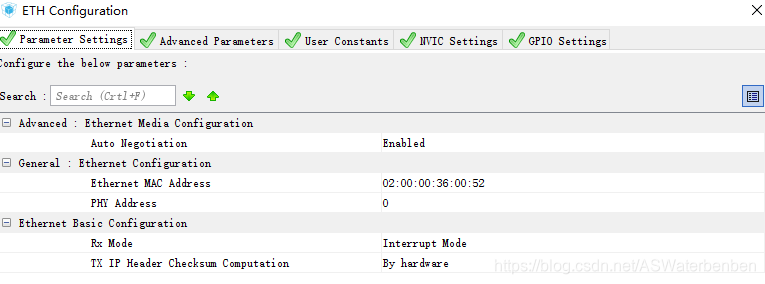
4.配置ETH,由於阿波羅開發板的LAN8720晶片的PHYAD0引腳懸空,故PHY Address設定為0;
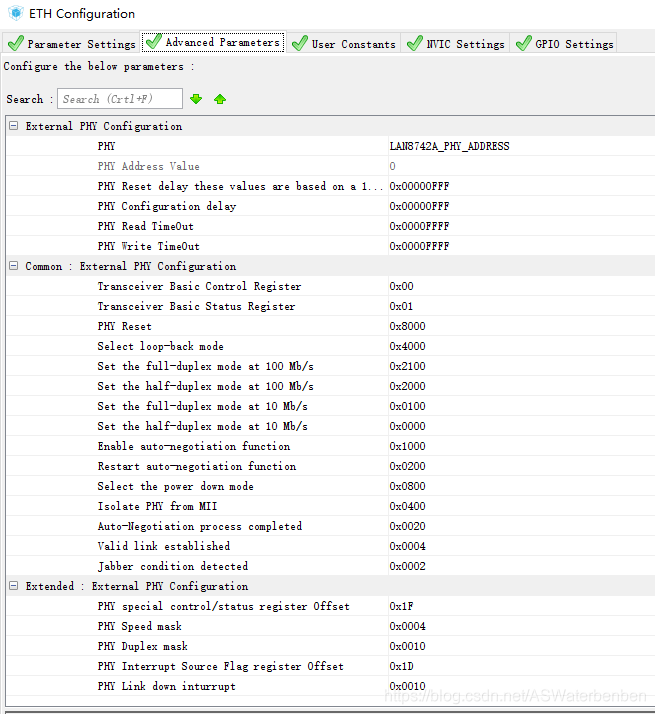
5.由於我用的STM32cubeMX的版本是將LAN8742A作為預設晶片,所以我們這裡不做修改,只用將內部引數改為LAN8720引數即可;
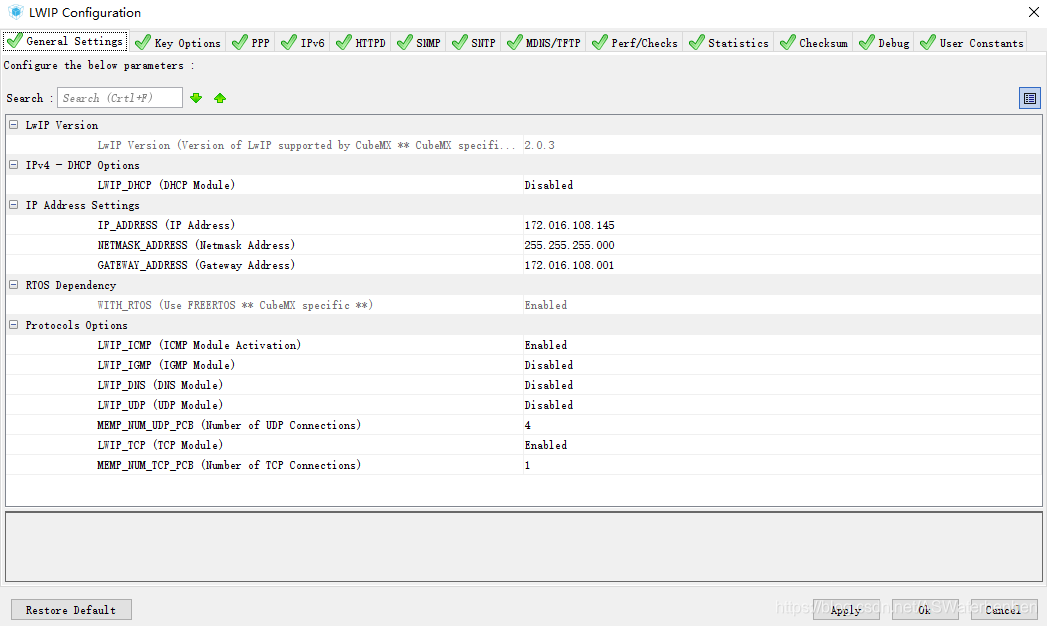
6.配置LWIP,本人這裡不使用DHCP獲取IP地址等資訊,並且我使用的是TCP,所以未對UDP使能,設定如圖;
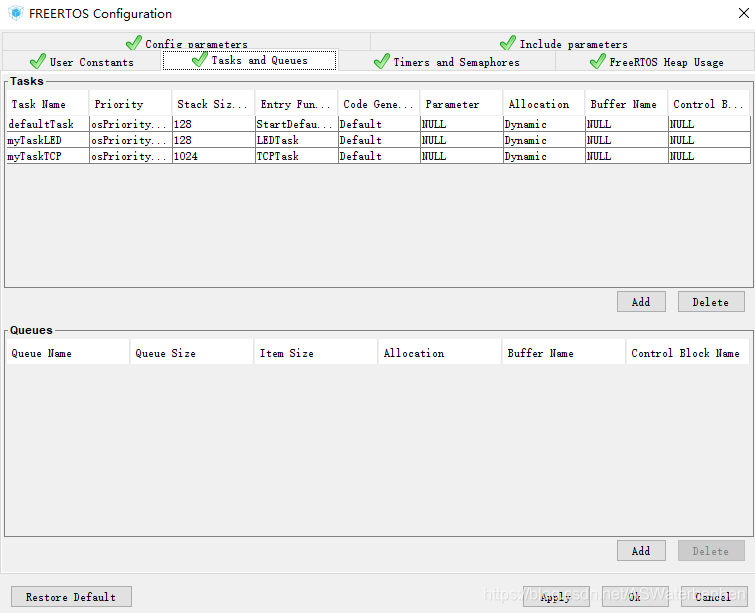
7.配置FREERTOS,我在這裡加了兩個執行緒備用

8.按下生成按鈕,生成專案,生成時需要選擇編譯軟體為自己用的軟體,本人使用的是V5;
由於阿波羅開發板的PHY晶片的RESET引腳是依靠PCF8574的P7位控制,所以我們要在專案中引入PCF8574的程式碼,以下程式碼可以在阿波羅資料盤中找到
開啟main.c裡的加上#include “pcf8574.h”,並在初始化部分將PCF8574初始化
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32f7xx_hal.h"
#include "cmsis_os.h"
#include "lwip.h"
#include "gpio.h"
/* USER CODE BEGIN Includes */
#include "pcf8574.h"
/* USER CODE END Includes */
/* Private variables ---------------------------------------------------------*/ 開啟freertos.c裡的加上
#include “gpio.h”
#include “sys.h”
#include “pcf8574.h”
#include “tcp_echoserver.h”,並在主執行緒將PCF8574初的P7管腳使能
PCF8574_WriteBit(ETH_RESET_IO,0);程式碼如下
/* Includes ------------------------------------------------------------------*/
#include "FreeRTOS.h"
#include "task.h"
#include "main.h"
#include "cmsis_os.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "gpio.h"
#include "sys.h"
#include "pcf8574.h"
#include "tcp_echoserver.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN Variables */
/* USER CODE END Variables */
osThreadId defaultTaskHandle;
osThreadId myTaskLEDHandle;
osThreadId myTaskTCPHandle;
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN FunctionPrototypes */
extern void tcp_echoserver_init(void);
/* USER CODE END FunctionPrototypes */
void StartDefaultTask(void const * argument);
void LEDTask(void const * argument);
void TCPTask(void const * argument);
extern void MX_LWIP_Init(void);
void MX_FREERTOS_Init(void); /* (MISRA C 2004 rule 8.1) */
/**
* @brief FreeRTOS initialization
* @param None
* @retval None
*/
void MX_FREERTOS_Init(void) {
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* USER CODE BEGIN RTOS_MUTEX */
/* add mutexes, ... */
/* USER CODE END RTOS_MUTEX */
/* USER CODE BEGIN RTOS_SEMAPHORES */
/* add semaphores, ... */
/* USER CODE END RTOS_SEMAPHORES */
/* USER CODE BEGIN RTOS_TIMERS */
/* start timers, add new ones, ... */
/* USER CODE END RTOS_TIMERS */
/* Create the thread(s) */
/* definition and creation of defaultTask */
osThreadDef(defaultTask, StartDefaultTask, osPriorityNormal, 0, 128);
defaultTaskHandle = osThreadCreate(osThread(defaultTask), NULL);
/* definition and creation of myTaskLED */
osThreadDef(myTaskLED, LEDTask, osPriorityIdle, 0, 128);
myTaskLEDHandle = osThreadCreate(osThread(myTaskLED), NULL);
/* definition and creation of myTaskTCP */
osThreadDef(myTaskTCP, TCPTask, osPriorityIdle, 0, 1024);
myTaskTCPHandle = osThreadCreate(osThread(myTaskTCP), NULL);
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
/* USER CODE END RTOS_THREADS */
/* USER CODE BEGIN RTOS_QUEUES */
/* add queues, ... */
/* USER CODE END RTOS_QUEUES */
}
/* USER CODE BEGIN Header_StartDefaultTask */
/**
* @brief Function implementing the defaultTask thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartDefaultTask */
void StartDefaultTask(void const * argument)
{
/* init code for LWIP */
MX_LWIP_Init();
/* USER CODE BEGIN StartDefaultTask */
PCF8574_WriteBit(ETH_RESET_IO,0); //Æô¶¯PHYоƬ
Tcp_Server_Init();
/* Infinite loop */
for(;;)
{
osDelay(1);
}
/* USER CODE END StartDefaultTask */
}
/* USER CODE BEGIN Header_LEDTask */
/**
* @brief Function implementing the myTaskLED thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_LEDTask */
void LEDTask(void const * argument)
{
/* USER CODE BEGIN LEDTask */
/* Infinite loop */
for(;;)
{
osDelay(1);
}
/* USER CODE END LEDTask */
}
/* USER CODE BEGIN Header_TCPTask */
/**
* @brief Function implementing the myTaskTCP thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_TCPTask */
void TCPTask(void const * argument)
{
/* USER CODE BEGIN TCPTask */
/* Infinite loop */
for(;;)
{
osDelay(1);
}
/* USER CODE END TCPTask */
}
接下來我們的開發板連上電腦,保證電腦IP地址和開發板IP地址在同一網段後按Windows+R後輸入cmd回車開啟CMD,在介面輸入ping xxx.xxx.xxx.xxx(xxx代表開發板IP地址),可以得到

這樣開發板就ping通了,這個時候就可以引入伺服器或是客戶端的程式碼,實現對應功能。