
關於micropython ESP32的MQTT通訊方式控制舵機
阿新 • • 發佈:2018-12-19
在這個基礎上利用物聯網的技術進行舵機控制,注重的是如何用MQTT進行通訊
當然我們要做的前提準備是: 硬體:esp32板子,pca9685板子,一個舵機 【其實無論是樹莓派板子,還是esp8266,還是其他的能夠運用mqtt通訊的板子原理是相通的】
硬體連線:

軟體:win10系統,電腦已安裝python3.5
- 使用Python 進行基於MQTT的物聯網開發, 這就需要用使用pip3安裝另外一個庫
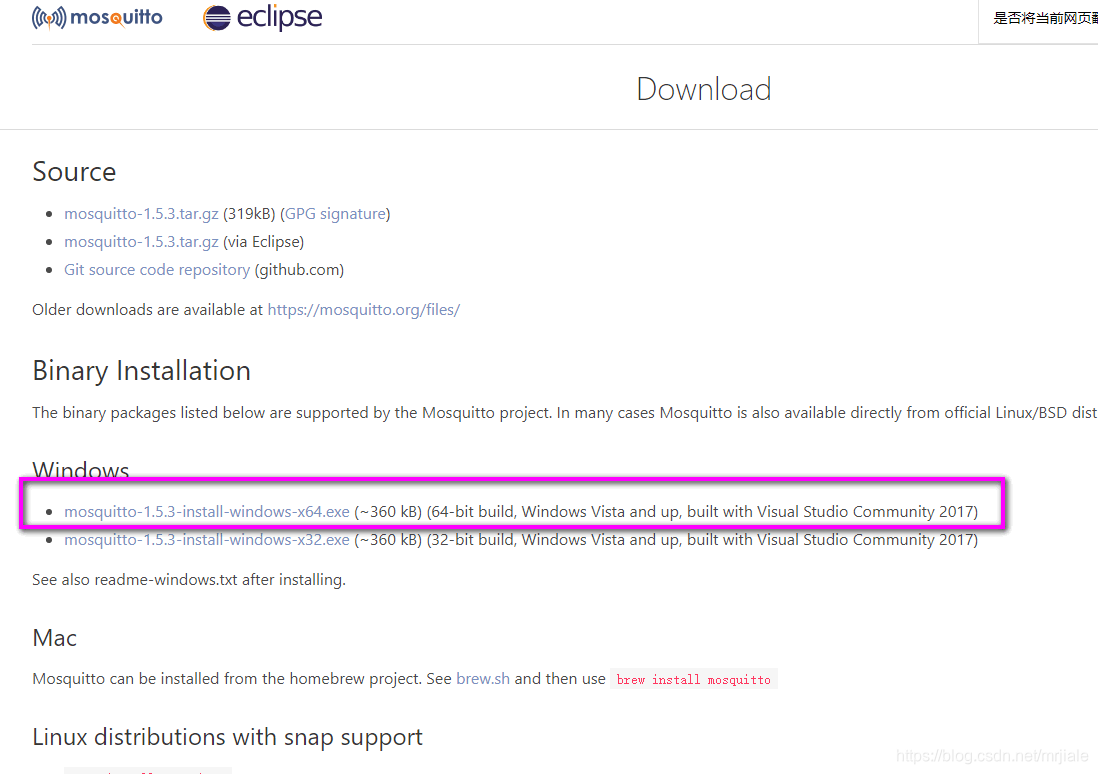
paho-mqtt:pip3 install paho-mqtt - 電腦安裝軟體:mosquitto
【下載地址http://www.mosquitto.org/download/】
 畫重點:每次使用MQTT進行通訊的時候都要開啟mosquitto服務找到安裝目錄,然後在當前目錄下 shift加右鍵用命令視窗開啟cmd,輸入
畫重點:每次使用MQTT進行通訊的時候都要開啟mosquitto服務找到安裝目錄,然後在當前目錄下 shift加右鍵用命令視窗開啟cmd,輸入mosquitto -v
這裡還是得整理下我要做啥:我將會用電腦通過mqtt通訊方式與esp進行通訊,即打算用wifi控制舵機【這就可以擴大了,如果我用手機app控制那就是和智慧家居的做法類似了】
貼程式碼: esp32板子要上傳的程式碼:
exec(open('subscriber.py').read(), globals())
# -*- coding:utf-8 -*-
'''
基於PCA9685 I2C舵機控制模組對舵機進行控制的庫
'''
import pca9685
import math
class # -*- coding:utf-8 -*-
'''
PCA9685 I2C舵機控制模組的庫
'''
import ustruct
import time
class PCA9685:
def __init__(self, i2c, address=0x40):
self.i2c = i2c
self.address = address
self.reset()
def _write(self, address, value):
self.i2c.writeto_mem(self.address, address, bytearray([value]))
def _read(self, address):
return self.i2c.readfrom_mem(self.address, address, 1)[0]
def reset(self):
self._write(0x00, 0x00) # Mode1
def freq(self, freq=None):
if freq is None:
return int(25000000.0 / 4096 / (self._read(0xfe) - 0.5))
prescale = int(25000000.0 / 4096.0 / freq + 0.5)
old_mode = self._read(0x00) # Mode 1
self._write(0x00, (old_mode & 0x7F) | 0x10) # Mode 1, sleep
self._write(0xfe, prescale) # Prescale
self._write(0x00, old_mode) # Mode 1
time.sleep_us(5)
self._write(0x00, old_mode | 0xa1) # Mode 1, autoincrement on
def pwm(self, index, on=None, off=None):
if on is None or off is None:
data = self.i2c.readfrom_mem(self.address, 0x06 + 4 * index, 4)
return ustruct.unpack('<HH', data)
data = ustruct.pack('<HH', on, off)
self.i2c.writeto_mem(self.address, 0x06 + 4 * index, data)
def duty(self, index, value=None, invert=False):
if value is None:
pwm = self.pwm(index)
if pwm == (0, 4096):
value = 0
elif pwm == (4096, 0):
value = 4095
value = pwm[1]
if invert:
value = 4095 - value
return value
if not 0 <= value <= 4095:
raise ValueError("Out of range")
if invert:
value = 4095 - value
if value == 0:
self.pwm(index, 0, 4096)
elif value == 4095:
self.pwm(index, 4096, 0)
else:
self.pwm(index, 0, value)
#created by lijiale
from umqtt.simple import MQTTClient
import time
from machine import I2C,Pin
from servo import Servos
i2c=I2C(sda=Pin(21),scl=Pin(22),freq=10000)
servos=Servos(i2c,address=0x40)
SERVER = '183.53.18.170'
TOPIC = b'mrjiale'
def servo_start():
while True:
for i in range(2, 170):
servos.position(0,i)
time.sleep_ms(10)
for i in range(170, 2, -1):
servos.position(0,i)
time.sleep_ms(10)
def mqtt_callback(topic, msg):
global TOPIC
print('topic: {}'.format(topic))
print('msg: {}'.format(msg))
if msg == b"start":
servo_start()
client = MQTTClient(CLIENT_ID, SERVER)
client.set_callback(mqtt_callback)
client.connect()
client.subscribe(TOPIC)
while True:
client.check_msg()
time.sleep(1)
把上面程式碼丟進esp32,通電esp就會自動執行程式碼【main.py】
電腦端:
開啟一個cmd視窗執行mosquitto服務,
開啟另外一個cmd視窗執行下面程式碼 mqtt_servo.py
import paho.mqtt.client as mqtt
import time
HOST_IP = '183.53.18.170' # Server的IP地址
HOST_PORT = 1883 # mosquitto 預設開啟埠
TOPIC_ID = 'mrjiale' # TOPIC的ID
# 建立一個客戶端
client = mqtt.Client()
# 連線到伺服器(本機)
client.connect(HOST_IP, HOST_PORT, 60)
message = 'start'
client.publish(TOPIC_ID, message)
print('SEND: {}'.format(message))
舵機0-180°之間迴圈轉動,完畢。
【最後反正你也不會同樣操作,理解原理即可,畢竟每個人用的硬體不一樣。】