
影象處理演算法4——Sobel 邊緣檢測運算元
Sobel 運算元是一個離散微分運算元 (discrete differentiation operator)。 它結合了高斯平滑和微分求導,用來計算影象灰度函式的近似梯度。
影象邊緣,相素值會發生顯著的變化了。表示這一改變的一個方法是使用 導數 。 梯度值的大變預示著影象中內容的顯著變化。用更加形象的影象來解釋,假設我們有一張一維圖形。下圖2中灰度值的”躍升”表示邊緣的存在,圖3中使用一階微分求導我們可以更加清晰的看到邊緣”躍升”的存在。

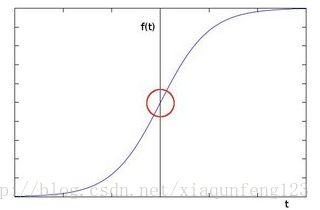
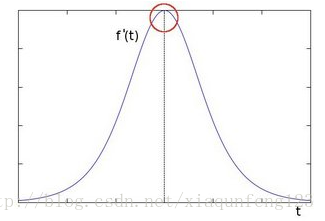
圖1、lena.jpg
圖2、畫素一維圖形 圖3、一階導數
具體是採用卷積的計算方法實現的。假設被作用的影象為 ,在兩個方向上求導:
,在兩個方向上求導:
水平變化求導:將 與一個奇數大小的核心  進行卷積。比如,當核心大小為3時, 的計算結果為圖4a:
進行卷積。比如,當核心大小為3時, 的計算結果為圖4a:
垂直變化求導:將 I 與一個奇數大小的核心  進行卷積。比如,當核心大小為3時, 的計算結果為圖4b:
進行卷積。比如,當核心大小為3時, 的計算結果為圖4b:
在影象的每一點,結合以上兩個結果求出近似 梯度
,如圖4c:
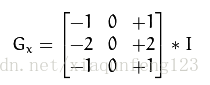
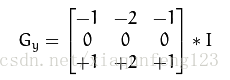

圖4a、 圖4b、 圖4c、
因為Sobel運算元只是求取了導數的近似值,當核心大小為 時,以上Sobel核心可能產生比較明顯的誤差。為解決這一問題,OpenCV提供了
時,以上Sobel核心可能產生比較明顯的誤差。為解決這一問題,OpenCV提供了
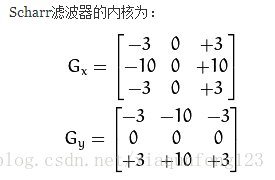
兩種實現版本:
C 版本:
cvSobel ( const cvArr* src, CvArr* dst, int xorder, int yorder, int aperture_size =3 )
src, dst 分別是源影象和目標影象,xorder ,yorder – 分別為x,y方向導數運算引數,可取0,1,2 。aperture_size是方形濾波器的寬,是小於7的奇數。
具體見《Learning OpenCV》那本書,P.170頁
下面是程式碼,比較簡單:
效果圖:#include <highgui.h> #include <cv.h> using namespace cv; using namespace std; int main(int argc, char ** argv) { IplImage* src, *dstx,*dsty,*dst; src = cvLoadImage( "car.png",0 ); dst = cvCreateImage( cvGetSize( src ), IPL_DEPTH_16S, 1 ); dstx = cvCreateImage( cvGetSize( src ), IPL_DEPTH_16S, 1 ); dsty = cvCreateImage( cvGetSize( src ), IPL_DEPTH_16S, 1 ); cvNamedWindow( "src" ); cvNamedWindow( "sobel" ); cvShowImage( "src", src ); cvSobel( src, dstx, 1, 0, 7 ); //sobel cvSobel( src, dsty, 0, 1, 7 ); cvAddWeighted(dstx,0.5,dsty,0.5,0,dst); cvShowImage( "sobel", dst ); cvWaitKey(0); cvReleaseImage( &src ); cvReleaseImage( &dst ); return 0; }

C++版本:
先來看一下C++下 Sobel 的定義
C++:void Sobel( InputArray src , OutputArray dst, int ddepth, int dx, int dy, int ksize=3,
double scale=1,double delta=0,intborderType=BORDER_DEFAULT )
各引數的意義如下:
src – 輸入影象。dst – 輸出影象,與輸入影象同樣大小,擁有同樣個數的通道。
ddepth –輸出圖片深度;下面是輸入影象支援深度和輸出影象支援深度的關係:
src.depth() = CV_8U, ddepth = -1/CV_16S/CV_32F/CV_64F
src.depth() = CV_16U/CV_16S, ddepth = -1/CV_32F/CV_64F
src.depth() = CV_32F, ddepth = -1/CV_32F/CV_64F
src.depth() = CV_64F, ddepth = -1/CV_64F
當 ddepth為-1時, 輸出影象將和輸入影象有相同的深度。輸入8點陣圖像則會擷取頂端的導數。
xorder – x方向導數運算引數。yorder – y方向導數運算引數。
ksize – Sobel核心的大小,可以是:1,3,5,7。 注意:只可以是小於7 的奇數
scale – 可選的縮放導數的比例常數。delta – 可選的增量常數被疊加到導數中。borderType – 用於判斷影象邊界的模式。
下面是程式:
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <stdlib.h>
#include <stdio.h>
using namespace cv;
using namespace std;
int main( int argc, char** argv )
{
Mat src, src_gray;
Mat grad;
char* window_name = "求解梯度";
int scale = 1;
int delta = 0;
int ddepth = CV_16S;
src = imread( "car.png" );
if( !src.data )
{
return -1;
}
//高斯模糊
GaussianBlur( src, src, Size(3,3), 0, 0, BORDER_DEFAULT );
//轉成灰度圖
cvtColor( src, src_gray,CV_RGB2GRAY );
namedWindow( window_name, CV_WINDOW_AUTOSIZE );
Mat grad_x, grad_y;
Mat abs_grad_x, abs_grad_y;
//x方向梯度計算
Sobel( src_gray, grad_x, ddepth, 1, 0, 3, scale, delta, BORDER_DEFAULT );
convertScaleAbs( grad_x, abs_grad_x );
//y方向梯度計算
Sobel( src_gray, grad_y, ddepth, 0, 1, 3, scale, delta, BORDER_DEFAULT );
convertScaleAbs( grad_y, abs_grad_y );
//加權和
addWeighted( abs_grad_x, 0.5, abs_grad_y, 0.5, 0, grad );
imshow( window_name, grad );
waitKey();
return 0;
}Scharr( src_gray, grad_x, ddepth, 1, 0, scale, delta, BORDER_DEFAULT );
Scharr( src_gray, grad_x, ddepth, 0, 1, scale, delta, BORDER_DEFAULT );
