
張正友標定法示例 (含原始碼)
博主在部落格園的第一篇部落格,以著名的張大牛標定法開始吧!
具體標定原理就不詳細說了,資料數不勝數,重點看張正友的原著《A Flexible New Technique for Camera Calibration》,搞明白這篇文章就足夠了。
好了,現在主要說一下標定過程,並附上博主自己呼叫Opencv介面編寫的程式碼。
1.拍攝棋盤格圖片,8幅左右合適,文獻裡說n=8時,最小二乘法計算內參有穩定解。所以我就拍了9幅。
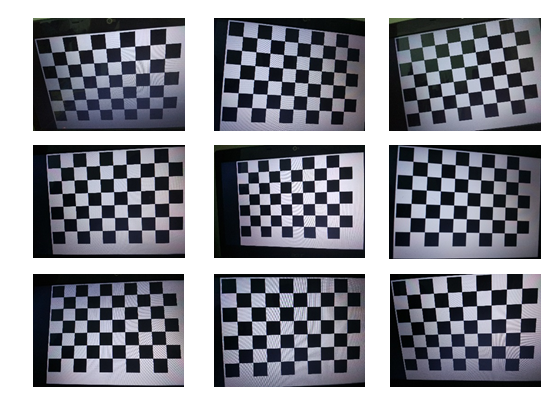
2. 讀取棋盤格影象,提取角點(注意:都是內角點)。為了提高角點提取精度,進一步進行亞畫素角點的提取,附上亞畫素角點提取後的棋盤格影象。

3. 開始攝像機標定,opencv1.0 2.0版只有一種攝像機標定模型,就是普通的小孔成像模型,在cv::空間下。而從opencv3.0開始,新增了一種魚眼相機標定模型,在fisheye::空間下。兩種模型的主要區別在於像與物的投影關係不同,具體的文獻資料依然是數不勝數,這裡就不贅述。根據opencv官方文件的建議,在畸變程度較大的廣角鏡頭(比如:魚眼鏡頭)上進行攝像機標定和畸變校正,最好是用fisheye模型,該模型在影象邊緣畸變程度很大的地方比普通相機模型的效果要好。
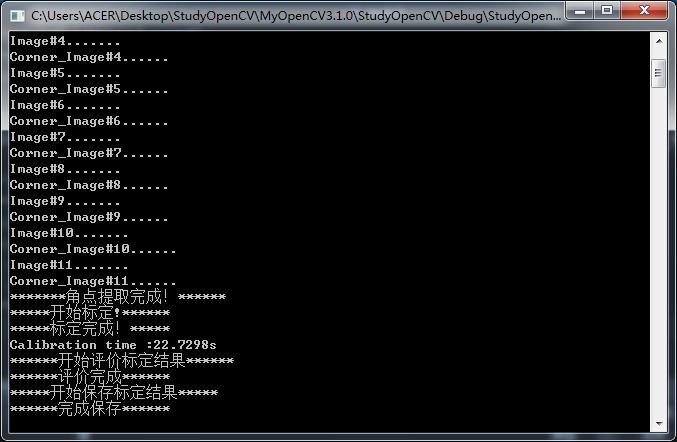
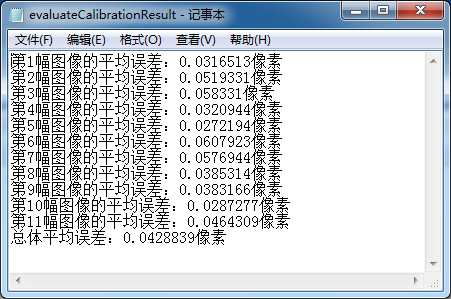
4. 對標定結果進行評價
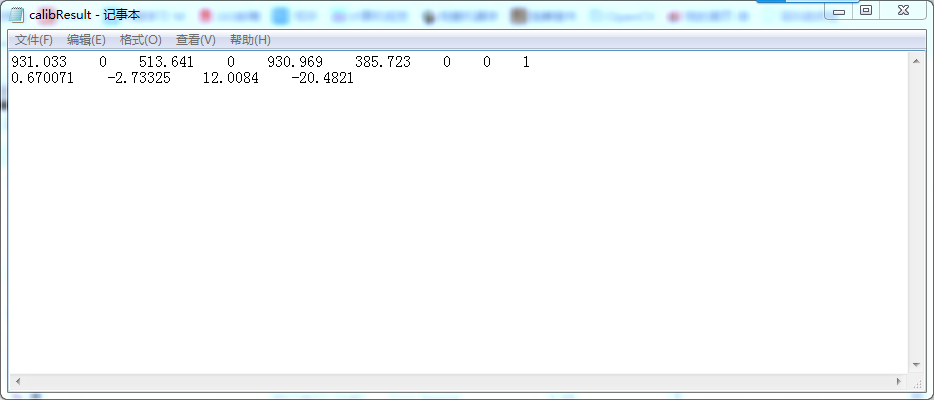
5.儲存標定結果,寫入txt檔案,主要是內參(歸一化焦距,fx,fy; 光心座標cx,cy;以及畸變係數k1,k2k3...)
相關推薦
張正友標定法示例 (含原始碼)
博主在部落格園的第一篇部落格,以著名的張大牛標定法開始吧! 具體標定原理就不詳細說了,資料數不勝數,重點看張正友的原著《A Flexible New Technique for Camera Calibration》,搞明白這篇文章就足夠了。 好了,現在主要說一下標定過程,並附上博主自己呼叫Opencv介面編
OpenCV 張正友標定法的實現
關於張正友標定法的原理,網上的資料很多,本人雖然看了一些,但覺得還沒有到能講的非常清楚的程度,因此不在這裡做太多原理描述。有興趣瞭解細節的可以看張大神的原文,或者這篇文章。 需要大概知道的是,相機標定中內參、外參和畸變引數的概念。 內參有
張正友標定(一):為什麼要進行相機標定
關於相機標定的部落格和論文現在已經多到魚龍混雜的層面,多數初學者在眾多資料中翻來翻去,然而對很多的標定細節和原理性知識知之甚少,以致於停留在跑demo的級別。本人在翻看大量的部落格論文基礎上,深感有必要將相機標定的知識進行一些歸納總結。由於才疏學淺,可能會在下面的文章中出
張正友標定Opencv實現、標定流程以及影象座標轉為世界座標
使用相機以前,首先要進行相機標定,其原因是我們通過標定知道相機的內外參、得到內外參矩陣後可對相機拍攝的照片進行矯正,可以得到畸變較小的影象。而相機標定的輸入就是相機所拍的多幀圖片的角點座標,以及標定板影象上所有角點的空間座標(一般Z軸假設為Z=0)。相機標定後的輸出就
Opencv—張正友標定流程及標定結果評價
##1.相機標定的目的 : **相機標定的輸入:**標定影象上所有內點(inliers)的影象座標,標定板上所有inliers的空間三維座標(一般情況下假設Z=0平面上)。 **相機標定的輸出:**獲取攝像機的內參和外參矩陣,同時也會得到每一副標定影象的旋轉和平
張正友標定LM優化...
引用 learnhard對於LM的說明,本人完全同意他的說法, LM演算法可用於解決非線性最小二乘問題。多用於曲線擬合等場合。 LM演算法的實現並不難,這裡不討論使用MATLAB等工具直接得到結果的過程,使用那些工具對於演算法程式設計能力的提高無任何益處。 LM演算法的關鍵
SLAM入門之視覺里程計(6):相機標定 張正友經典標定法詳解
https://www.cnblogs.com/wangguchangqing/p/8335131.html 想要從二維影象中獲取到場景的三維資訊,相機的內參數是必須的,在SLAM中,相機通常是提前標定好的。張正友于1998年在論文:"A Flexible New Technique fro C
詳細介紹Opencv實現張正友法相機標定
一.本程式基於以下配置: - Visual Studio 2015 - OpenCV 3.1.0 開發環境配置參考:OpenCV3.1.0+VS2013開發環境配置 二.本程式準備工作: 本程式使用的標定板是10行14列棋盤格圖案,示
相機標定(具體過程詳解)張正友、單應矩陣、B、R、T
首先先宣告一點,本文介紹的方法並非很多文章中介紹的方法只是應用,直接呼叫matlab或者opencv的內部原有相機標定函式,本文主要介紹求解相機引數的一個大體流程。 相機標定分:內參標定、外參標定、c矩陣 內參標定:採用棋盤圖或者點陣圖,將相機固定(焦距、光圈等
騰訊AI Lab負責人張潼離職,張正友或接替其位
來源 | 網易智慧 剛剛,據知情人士透露,騰訊人工智慧實驗室 AI Lab 主任張潼已經從騰訊離職,未來將重返學術界。 關於該訊息,騰訊方面目前尚無迴應。 網易智慧獨家獲悉,AI Lab接手人是機器人實驗室的張正友。 有訊息人士認為,張潼博
騰訊張正友:攻克可進化機器人,6個研究趨勢與7大技術突破點
感謝閱讀騰訊AI Lab微訊號第53篇文章,張正友博士在2018騰訊全球合作伙伴大會“共生·人工
《計算機視覺 : 計算理論與演算法基礎》(馬頌德 & 張正友)掃描版[PDF]
《計算機視覺 : 計算理論與演算法基礎》(馬頌德 & 張正友)掃描版[PDF] 算機視覺是在影象處理的基礎上發展起來的新興學科。計算機視覺從資訊處理的層次研究視覺資訊的認知過程,研究視覺資訊處理的計算理論、表達與計算方法。本書系統地介紹了計算機視覺的重要理論與
【181113】VC++遞迴法實現簡單分形圖形示例程式原始碼
原始碼下載簡介 VC++遞迴法實現簡單分形圖形示例程式,比如扣氏曲線類定義等。大家在C/C++學習時都會遇到遞迴,課本上以汗諾塔為例進行講解,然後大家都希望自己找到一個遞迴的例項。本程式碼以一個最簡單
Web前端設計入門示例,含原始碼
一:Table <html> <head> <title>菜譜</title> </head> <body> <table width="100%" align="center" border=
非常好理解的KNN算法示例
示例 ant 詳細 amp 參考 .com www mat www. 參考鏈接:https://www.joinquant.com/post/2227?f=study&m=math;一只兔子幫你理解KNN https://www.joinquant.com/post
MD5加密算法原理(含代碼)以及SHA算法相關信息
核心 但是 加密 不支持 .com about tran temp get 轉載: http://blog.csdn.net/forgotaboutgirl/article/details/7258109 java代碼部分 親測通過。 這裏 就 只貼一下代碼吧 。 動作只有
scikit-learn初步,一個KNN算法示例
一個 port 算法 ict 分割 pan sele lec tar 1 import numpy as np 2 from sklearn import datasets #數據集 3 from sklearn.model_selection import tra
汽車車牌JS正則表達式驗證(含新能源車牌)
else 通用 urn 小寫 區分 不存在 普通 gpo 格式 /** * 第一:普通汽車 * 車牌號格式:漢字 + A-Z + 5位A-Z或0-9( 車牌號不存在字母I和O防止和1、0混淆) * (只包括了普通車牌號,教練車,警等車牌號 。部分部隊車,新能源不包
拉登是我罩的隊_張正浩_鄭鑒
計劃 俄羅斯方塊 風格 責任心 class ++ 展現 是我 界面 拉登是我罩的 隊員學號 鄭鑒(隊長)3116005208 張正浩 3116005207 團隊項目 2048俄羅斯方塊 隊員風采 鄭鑒: 風格:兔子 擅長的技術:C++ 編程興趣:對前端、ui設計沒興
歐幾裏得算法(含嚴謹證明)
iostream char code using cout har 不可 dig 也有 gcd(gong chan dang)(greatest common divisor) 最大公約數,指兩個整數所有公共約數中最大的。 首先先上結論,求最大公約數,我們可以通過遞歸gc