
OpenCV使用Canny邊緣檢測器實現影象邊緣檢測
阿新 • • 發佈:2019-01-25
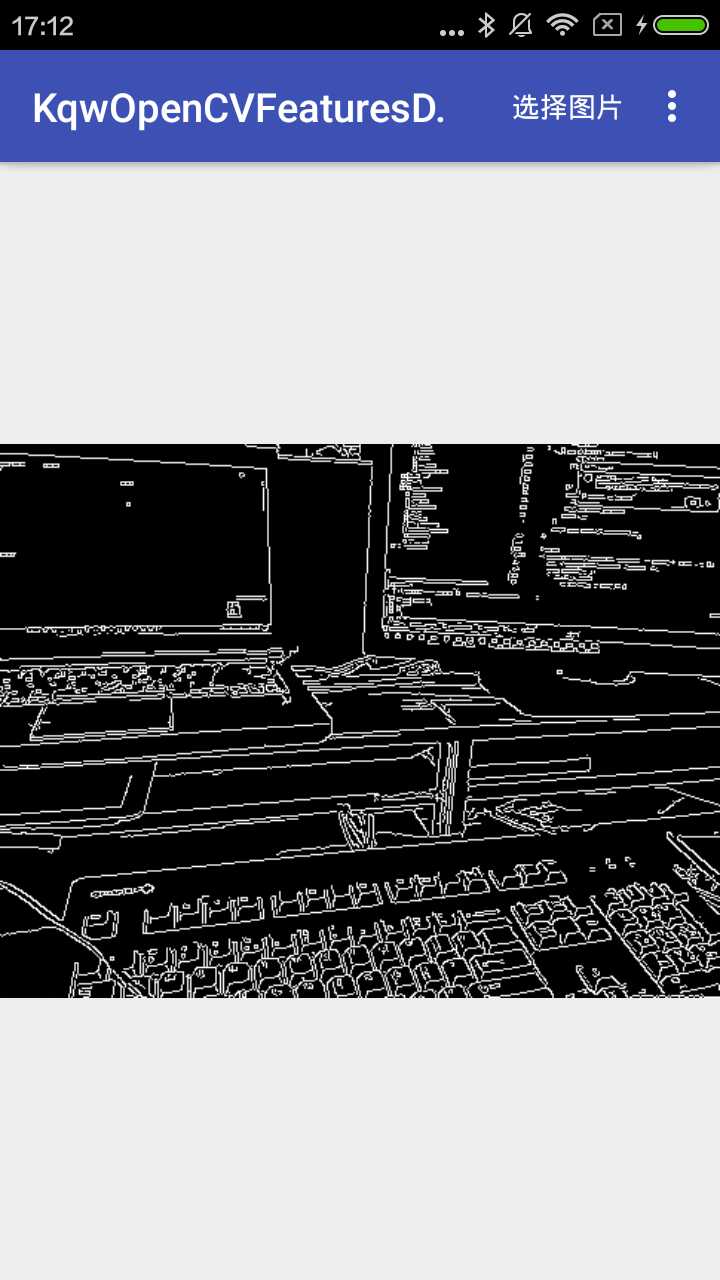
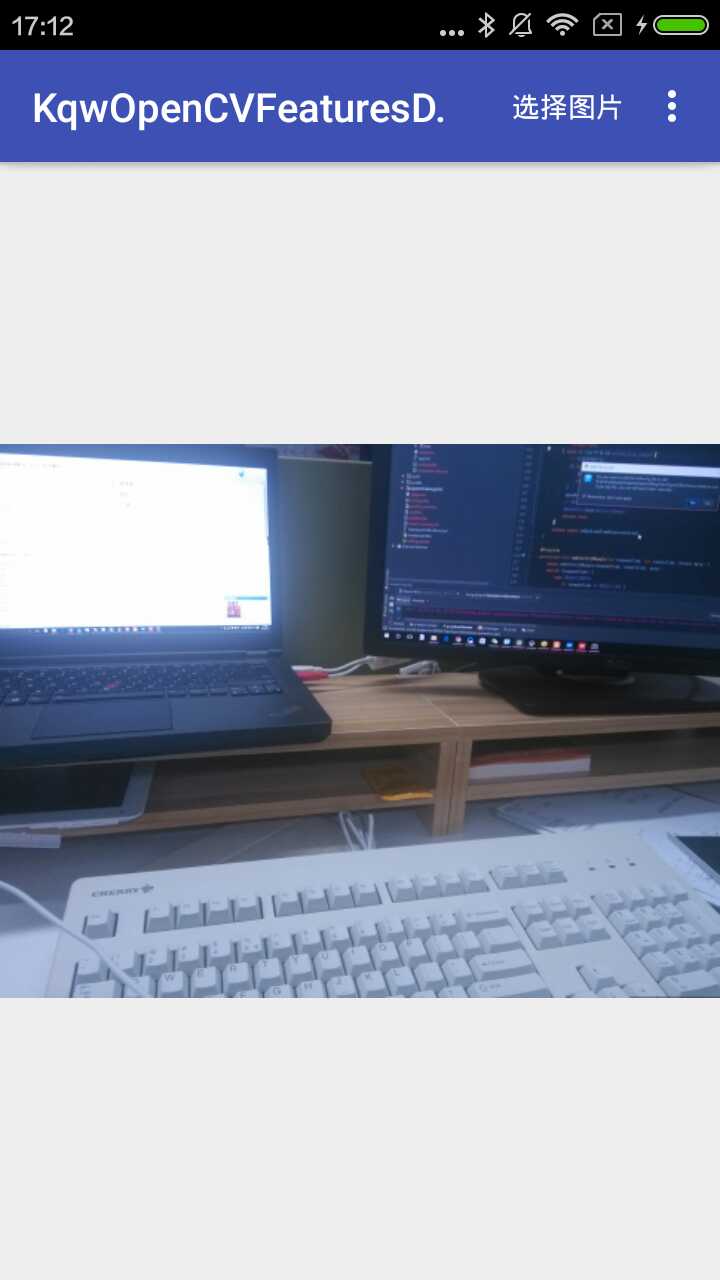
效果圖
原始碼
Canny邊緣檢測器是一種被廣泛使用的演算法,並被認為是邊緣檢測最優的演算法,該方法使用了比高斯差分演算法更復雜的技巧,如多向灰度梯度和滯後閾值化。
Canny邊緣檢測器演算法基本步驟
- 平滑影象:通過使用合適的模糊半徑執行高斯模糊來減少影象內的噪聲。
- 計算影象的梯度:這裡計算影象的梯度,並將梯度分類為垂直、水平和斜對角。這一步的輸出用於在下一步中計算真正的邊緣。
- 非最大值抑制:利用上一步計算出來的梯度方向,檢測某一畫素在梯度的正方向和負方向上是否是區域性最大值,如果是,則抑制該畫素(畫素不屬於邊緣)。這是一種邊緣細化技術,用最急劇的變換選出邊緣點。
- 用滯後閾值化選擇邊緣:最後一步,檢查某一條邊緣是否明顯到足以作為最終輸出,最後去除所有不明顯的邊緣。
演算法比較複雜,但是使用很簡單,首先將影象灰度化
// 原圖置灰
Imgproc.cvtColor(src, grayMat, Imgproc.COLOR_BGR2GRAY);然後呼叫Imgproc.Canny()方法即可
// Canny邊緣檢測器檢測影象邊緣
Imgproc.Canny(grayMat, cannyEdges, 10, 100);- 第一個引數表示影象輸入
- 第二個引數表述影象輸出
- 第三個引數表示低閾值
- 第四個引數表示高閾值
在Canny邊緣檢測演算法中,將影象中的點歸為三類:
被抑制點
灰度梯度值 < 低閾值
弱邊緣點
低閾值 <= 灰度梯度值 <= 高閾值
強邊緣點
高閾值 < 灰度梯度值
封裝
/**
* Canny邊緣檢測演算法
*
* @param bitmap 要檢測的圖片
*/
public void canny(Bitmap bitmap) {
if (null != mSubscriber)
Observable
.just(bitmap)
.map(new Func1<Bitmap, Bitmap>() {
@Override 使用
// 圖片特徵提取的工具類
mFeaturesUtil = new FeaturesUtil(new Subscriber<Bitmap>() {
@Override
public void onCompleted() {
// 圖片處理完成
dismissProgressDialog();
}
@Override
public void onError(Throwable e) {
// 圖片處理異常
dismissProgressDialog();
}
@Override
public void onNext(Bitmap bitmap) {
// 獲取到處理後的圖片
mImageView.setImageBitmap(bitmap);
}
});
// Canny邊緣檢測器檢測影象邊緣
mFeaturesUtil.canny(mSelectImage);