
【原創】中斷子系統-ARM GPIO中斷處理流程
阿新 • • 發佈:2021-01-10
[TOC]
本文以AM5728 GPIO中斷為例,簡單介紹有關從註冊GIC中斷到 驅動使用GPIO中斷的整個過程,主要關注中斷相關處理流程,為後續ARM平臺xenomai IPIPE中斷處理流程做鋪墊。
第一部分: GIC中斷控制器的註冊。
第二部分:裝置樹的device node在向platform_device轉化的過程中節點的interrupts屬性的處理。
第三部分:platform_device註冊新增。
第四部分:GPIO控制器驅動的註冊,大部分GPIO控制器同時具備interrupt controller的功能。
第五部分:引用GPIO中斷的節點的解析。
```C
/ {
#address-cells = <2>;
#size-cells = <2>;
compatible = "ti,dra7xx";
interrupt-parent = <&crossbar_mpu>;
chosen { };
gic: interrupt-controller@48211000 {
compatible = "arm,cortex-a15-gic";
interrupt-controller;
#interrupt-cells = <3>;
reg = <0x0 0x48211000 0x0 0x1000>,
<0x0 0x48212000 0x0 0x2000>,
<0x0 0x48214000 0x0 0x2000>,
<0x0 0x48216000 0x0 0x2000>;
interrupts = ;
interrupt-parent = <&gic>;
};
ocp {
compatible = "ti,dra7-l3-noc", "simple-bus";
#address-cells = <1>;
#size-cells = <1>;
ranges = <0x0 0x0 0x0 0xc0000000>;
ti,hwmods = "l3_main_1", "l3_main_2";
reg = <0x0 0x44000000 0x0 0x1000000>,
<0x0 0x45000000 0x0 0x1000>;
interrupts-extended = <&crossbar_mpu GIC_SPI 4 IRQ_TYPE_LEVEL_HIGH>,
<&wakeupgen GIC_SPI 10 IRQ_TYPE_LEVEL_HIGH>;
gpio1: gpio@4ae10000 {
......
};
gpio2: gpio@48055000 {
......
};
gpio3: gpio@48057000 {
......
};
gpio4: gpio@48059000 {
......
};
gpio5: gpio@4805b000 {
......
};
gpio6: gpio@4805d000 {
......
};
gpio7: gpio@48051000 {
compatible = "ti,omap4-gpio";
reg = <0x48051000 0x200>;
interrupts = ;
ti,hwmods = "gpio7";
gpio-controller;
#gpio-cells = <2>;
interrupt-controller;
#interrupt-cells = <2>;
};
gpio8: gpio@48053000 {
......
};
};
};
```
- 由於中斷級聯,對於GPIO控制器`gpio@48051000`下的每個GPIO來說,它們產生中斷後,不能直接通知GIC,而是先通知中斷控制器`gpio@48051000`,然後`gpio@48051000`再通過SPI-30通知GIC,然後GIC會通過irq或者firq觸發某個CPU中斷。
- root gic就是上面的"arm,cortex-a15-gic",它的interrupt cells是3, 表示引用gic上的一箇中斷需要三個引數
- Linux中每一個irq_domain都對應一個irq_chip,irq_chip是kernel對中斷控制器的軟體抽象。
## 第一部分 GIC中斷控制器的註冊
### 1. GIC驅動分析
ARM平臺的裝置資訊,都是通過`Device Tree`裝置樹來新增,由解析裝置樹到設備註冊新增的流程如下:
GIC裝置樹資訊如下
```C
/*arch\arm\boot\dts\dra7.dtsi*/
gic: interrupt-controller@48211000 {
compatible = "arm,cortex-a15-gic";
interrupt-controller;
#interrupt-cells = <3>;
reg = <0x0 0x48211000 0x0 0x1000>,
<0x0 0x48212000 0x0 0x2000>,
<0x0 0x48214000 0x0 0x2000>,
<0x0 0x48216000 0x0 0x2000>;
interrupts = ;
interrupt-parent = <&gic>;
};
```
- `compatible`欄位:用於與具體的驅動來進行匹配,比如圖片中`arm,cortex-a15-gic`,可以根據這個名字去匹配對應的驅動程式;
- `interrupt-cells`欄位:用於指定編碼一箇中斷源所需要的單元個數,這個值為3。比如在外設在裝置樹中新增中斷訊號時,通常能看到類似`interrupts = <0 23 4>;`的資訊,第一個單元0,表示的是中斷型別(`1:PPI,0:SPI`),第二個單元23表示的是中斷號,第三個單元4表示的是中斷觸發的型別(電平觸發OR邊緣觸發);
- `reg`欄位:描述中斷控制器的地址資訊以及地址範圍,比如圖片中分別制定了`GIC Distributor(GICD)`和`GIC CPU Interface(GICC)`的地址資訊;
- `interrupt-controller`欄位:表示該裝置是一箇中斷控制器,外設可以連線在該中斷控制器上;
- 關於裝置數的各個欄位含義,詳細可以參考`Documentation/devicetree/bindings`下的對應資訊;
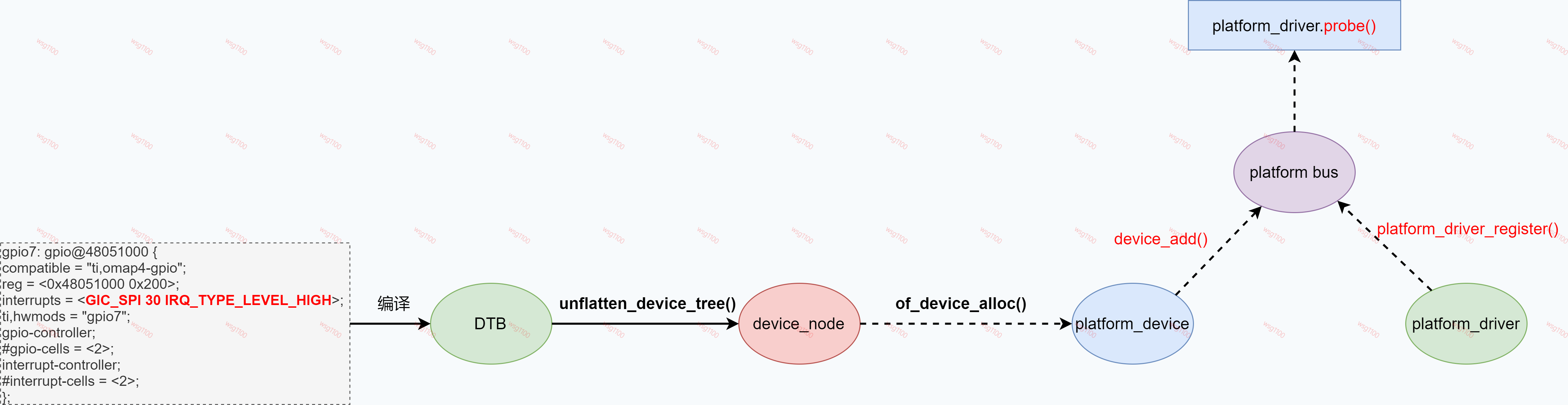
裝置樹的資訊,是怎麼新增到系統中的呢?`Device Tree`最終會編譯成`dtb`檔案,並通過Uboot傳遞給核心,在核心啟動後會將`dtb`檔案解析成`device_node`結構。

- 裝置樹的節點資訊,最終會變成`device_node`結構,在記憶體中維持一個樹狀結構;
- 裝置與驅動,會根據`compatible`欄位進行匹配;
### 2.GIC驅動流程分析
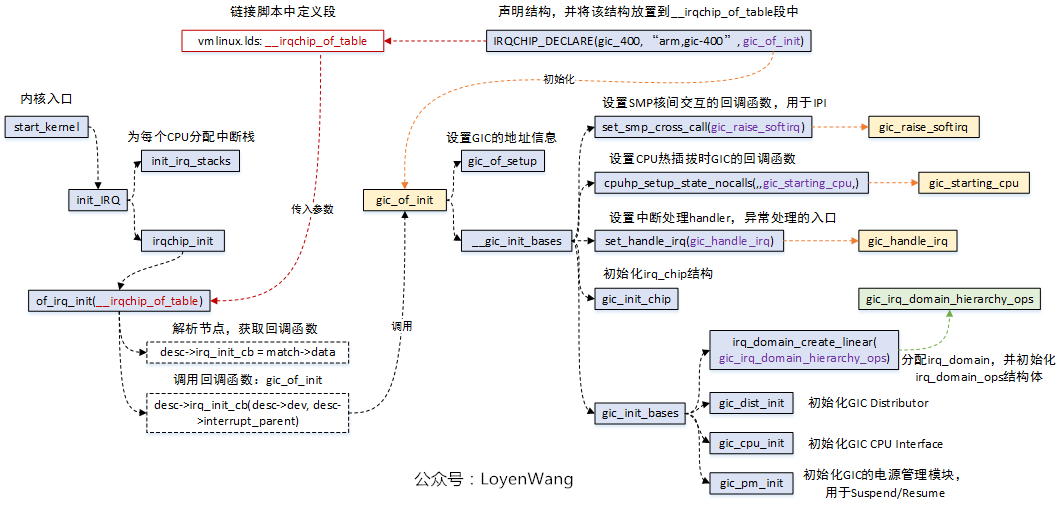
- 首先需要了解一下連結指令碼`vmlinux.lds`,指令碼中定義了一個`__irqchip_of_table`段,該段用於存放中斷控制器資訊,用於最終來匹配裝置;
- 在GIC驅動程式中,使用`IRQCHIP_DECLARE`巨集來宣告結構資訊,包括`compatible`欄位和回撥函式,該巨集會將這個結構放置到`__irqchip_of_table`欄位中;
- 在核心啟動初始化中斷的函式中,`of_irq_init`函式會去查詢裝置節點資訊,該函式的傳入引數就是`__irqchip_of_table`段,由於`IRQCHIP_DECLARE`已經將資訊填充好了,`of_irq_init`就會遍歷`__irqchip_of_table`,按照interrupt controller的連線關係從root開始,依次初始化每一個interrupt controller,`of_irq_init`函式會根據`arm,gic-400`去查詢對應的裝置節點,並獲取裝置的資訊。
- `or_irq_init`函式中,最終會回撥`IRQCHIP_DECLARE`宣告的回撥函式,也就是`gic_of_init`,而這個函式就是GIC驅動的初始化入口函數了;
```C
IRQCHIP_DECLARE(cortex_a15_gic, "arm,cortex-a15-gic", gic_of_init);
IRQCHIP_DECLARE(cortex_a9_gic, "arm,cortex-a9-gic", gic_of_init);
IRQCHIP_DECLARE(cortex_a7_gic, "arm,cortex-a7-gic", gic_of_init);
```
- GIC的工作,本質上是由中斷訊號來驅動,因此驅動本身的工作就是完成各類資訊的初始化,註冊好相應的回撥函式,以便能在訊號到來之時去執行;
- `set_smp_process_call`設定`__smp_cross_call`函式指向`gic_raise_softirq`,本質上就是通過軟體來觸發GIC的`SGI中斷`,用於核間互動;
- `cpuhp_setup_state_nocalls`函式,設定好CPU進行熱插拔時GIC的回撥函式,以便在CPU熱插拔時做相應處理;
- `set_handle_irq`函式的設定很關鍵,它將全域性函式指標`handle_arch_irq`指向了`gic_handle_irq`,而處理器在進入中斷異常時,會跳轉到`handle_arch_irq`執行,所以,可以認為它就是中斷處理的入口函數了;
- 驅動中完成了各類函式的註冊,此外還完成了`irq_chip`, `irq_domain`等結構體的初始化,計算這個GIC模組所支援的中斷個數gic_irqs,然後建立一個linear irq domain。此時尚未分配virq,也沒有建立hwirq跟virq的對映;
```C
gic_irqs = readl_relaxed(gic_data_dist_base(gic) + GIC_DIST_CTR) & 0x1f;
gic_irqs = (gic_irqs + 1) * 32;
if (gic_irqs > 1020)
gic_irqs = 1020;
gic->gic_irqs = gic_irqs;
gic->domain = irq_domain_create_linear(handle, gic_irqs,
&gic_irq_domain_hierarchy_ops,
gic);
```
在初始化的時候既沒有給hwirq分配對應的virq,也沒有建立二者之間的對映,這部分工作會到後面有人引用GIC上的某個中斷時再分配和建立。
- 最後,完成GIC硬體模組的初始化設定,以及電源管理相關的註冊等工作;
## 第二部分 device node轉化為platform_device
相關程式碼:
drivers/of/platform.c
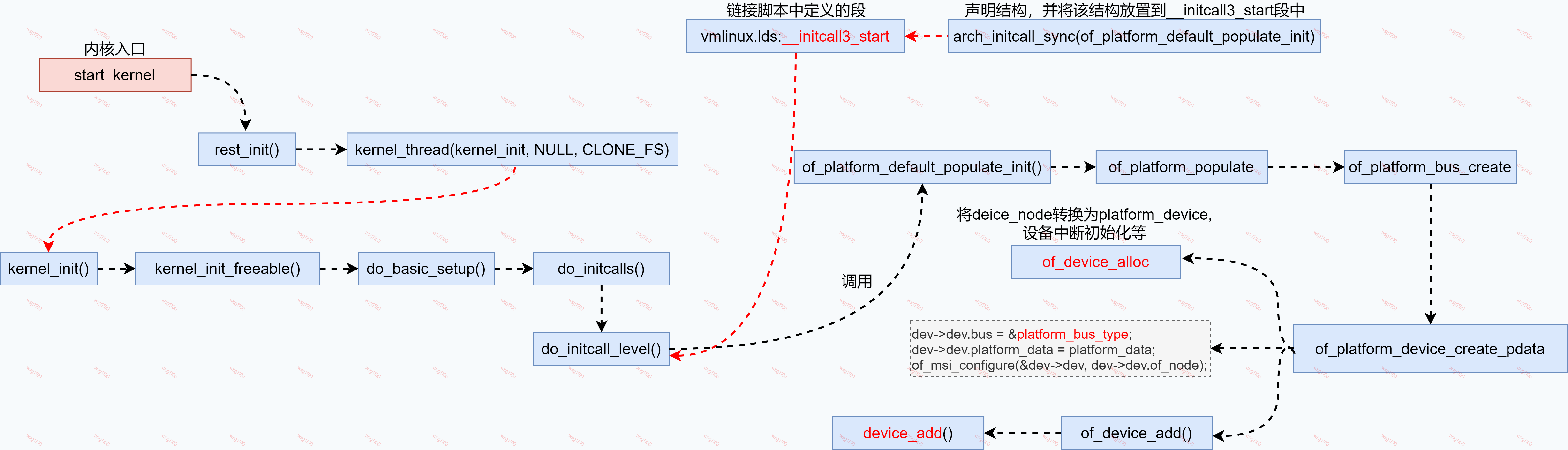
這個轉化過程是呼叫`of_platform_populate`開始的。以`gpio1: gpio@4ae10000`為例,暫時只關心interrupts屬性的處理,函式呼叫關係:
```C
struct platform_device *of_device_alloc(struct device_node *np,
const char *bus_id,
struct device *parent)
{
struct platform_device *dev;
int rc, i, num_reg = 0, num_irq;
struct resource *res, temp_res;
dev = platform_device_alloc("", PLATFORM_DEVID_NONE);
if (!dev)
return NULL;
/* count the io and irq resources */
while (of_address_to_resource(np, num_reg, &temp_res) == 0)
num_reg++;
num_irq = of_irq_count(np);/* 統計這個節點的interrupts屬性中描述了幾個中斷*/
/* Populate the resource table */
if (num_irq || num_reg) {
res = kzalloc(sizeof(*res) * (num_irq + num_reg), GFP_KERNEL);
if (!res) {
platform_device_put(dev);
return NULL;
}
dev->num_resources = num_reg + num_irq;
dev->resource = res;
for (i = 0; i < num_reg; i++, res++) {
rc = of_address_to_resource(np, i, res);
WARN_ON(rc);
}
/*解析interrupts屬性,將每一箇中斷轉化為resource結構體*/
if (of_irq_to_resource_table(np, res, num_irq) != num_irq)
pr_debug("not all legacy IRQ resources mapped for %s\n",
np->