
觸發器的時序引數與時序分析(轉)
一、概念
在實際電路中,必須考慮傳輸延遲的影響。比如D鎖存器,在時鐘訊號從1變成0時,它把當前輸出的值儲存在鎖存器中。如果輸入D穩定,則電路可以穩定工作,如果在時鐘跳變時候D的內容也正好發生變化,則可能產生不可預知的結果。所以電路設計者必須保證時鐘訊號跳變時後,輸入訊號是穩定的。
下圖中標示了一些關鍵時間區間,這些區間和工藝有關。積體電路製造廠家都會提供這個引數。
建立時間(Tsu:set up time):是指在觸發器的時鐘訊號上升沿到來以前,資料穩定不變的時間,如果建立時間不夠,資料將不能在這個時鐘上升沿被穩定的打入觸發器,Tsu就是指這個最小的穩定時間。
保持時間(Th:hold time):
如果電路中使用的觸發器沒有沒有遵循建立和保持要求,則電路會進入“亞穩態”的不穩定狀態。
輸出響應時間(Tco或者TcQ)
觸發器輸出的響應時間,也就是觸發器的輸出在clk時鐘上升沿到來之後多長的時間內發生變化,也即觸發器的輸出延時。一般的,Q值從1到0和從0到1的延時並不完全一樣,但為了簡化,通常假定他們是相等的。對於商業晶片,通常會給出兩個Tco/TcQ的值,分別代表實際上可能產生的最大延時和最小延時。指定一個範圍是評估一個晶片延時的常見做法,因為晶片製造過程中存在許多延遲變化的來源。
二、數字系統設計常見與之有關的問題
1、問題提出
數字系統設計常見的電路圖,這裡需要保證資料能夠正確的在這兩個觸發器上進行傳輸,由此確定中間組合邏輯電路的傳輸延時的範圍。
Tcomb: 組合邏輯電路的傳輸延時
2、第二個觸發器要滿足建立時間的約束條件
時序圖如下,假設D1的輸入為圖中的藍線所示
時序解釋:
在第一個時鐘上升沿,前邊的觸發器採集D1訊號,將高電平打入觸發器,經過Tco的觸發器輸出延時到達組合邏輯電路。又經過組合邏輯電路的延時Tcomb(我們假定組合邏輯電路此時沒有改變訊號的高低,可以把它假定為一個緩衝器)送到了D2介面上。在第二個時鐘上升沿到來之前,D2資料線上的訊號要滿足穩定時間>觸發器的建立時間Tsu。
Tclk - Tco - Tcomb > Tsu
考慮最壞的情況:觸發器的輸出延時最大,組合邏輯電路的延時也最大,可得:
Tclk - Tco-max - Tcomb-max > Tsu
所以最小的 Tclk-min = Tco-max + Tcomb-bmax +Tsu;
根據這個公式,我們可以計算出該電路最大的始終頻率 Fmax = 1/Tclk-min
3、第二個觸發器要滿足保持時間的約束條件
時序圖如下,假設D1的輸入為圖中的藍線所示
時序解釋:
接著之前的時序圖繼續,在第二個時鐘上升沿前邊觸發器採集到D1上的低電平,經過Tco的延時在Q1上得到表達。這個低電平在經過組合電路延時Tcomb到達D2。現在的問題是經過這麼Tco+Tcomb的延時,D2上原本的高電平在第二個時鐘上升沿到來之後的穩定時間 > 第二個觸發器的保持時間。滿足了這個條件,後邊的觸發器才能穩定的接收到最初由D1傳過來的高電平。
Tco + Tcomb > Th
考慮到最壞的情況:觸發器的輸出延時最小,組合邏輯電路的延時也最小
Tco-min + Tcomb-min > Th
通常時序分析中,我們要檢查這個不等式,來確定電路中是否有時間違背。
4、問題的答案
我們得到中間組合邏輯電路的輸出延時範圍為:
(Tclk - Tco-max - Tsu) > Tcomb > (Th - Tco-min)
5、兩個時序分析例子
假設觸發器時間引數:Tsu = 0.6ns, Th = 0.4ns以及 0.8ns<= Tco <= 1.0ns, 通常我們可以假設邏輯閘的延時為1+0.1k,其中k為邏輯閘輸入端的個數。比如對於非門,只有一個輸入端,則為1+1*0.1=1.1ns。
我們來計算下面電路的時鐘最小週期:
Tclk-min = Tco-max + Tcomb-max + Tsu = 1.0 + 1.1 + 0.6 = 2.7ns
所以最高時鐘週期Fmax = 1/Tclk-min = 370.37MHz
{kind=link}
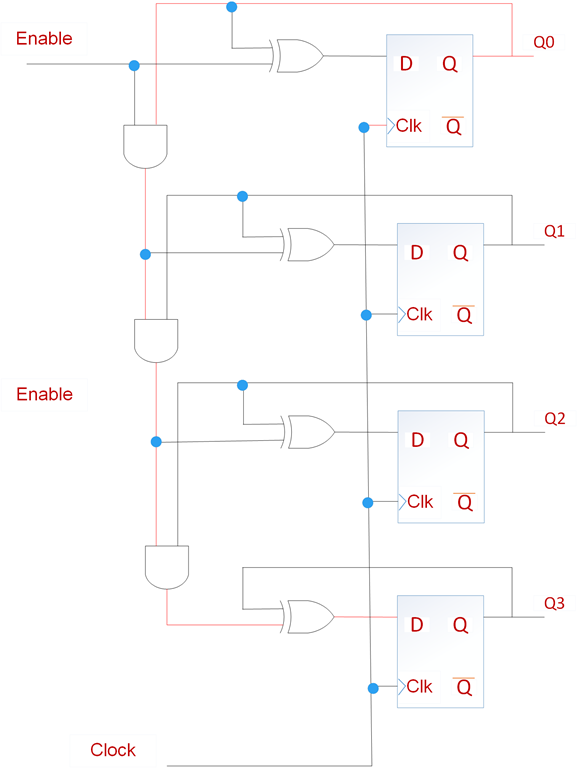
下面我們看一個複雜一點的例子,4位計數器電路。電路圖如下圖所示:
電路中有很多路徑可以使觸發器開始或結束,其中最長的路徑開始於觸發器Q0結束於Q3。電路中這種最長的路徑稱為關鍵路徑。如下圖中紅色線所示路徑,包括觸發器Q0的時鐘訊號輸出至Q的延時Tco,3個與門,1個異或門以及建立時間Tsu,所以有
Tclk-min = Tco + 3Tand + Txor +Tsu = 1.0 + 3*1.2+1.2+0.6=6.4ns
Fmax = 1/6.4ns = 156.25MHz
電路的最短路徑是每個觸發器經過一個異或門到它自身,每條這樣的路徑的最小延時為Tco+Txor=0.8+1.2=2.0ns>Th=0.4ns, 所以電路中不存在時間違背。
{kind=link}
6、時鐘偏斜的時序分析
上面4位暫存器的例子中,我們假設4個觸發器的時鐘訊號是同一時刻到達的。現在我們仍然假設時鐘訊號同一時刻到達Q0、Q1、Q2,但到達Q3存在一個延時。這種時鐘訊號達到觸發器的時間偏離稱為時鐘偏斜。時鐘偏斜可能由多種因素引起的。
關鍵路徑是從觸發器Q0到Q3,然而Q3的時鐘偏斜具有減小延遲的作用。原因在於資料載入到觸發器之前提供了額外的時間。將時鐘偏斜1.5ns計算在內,從Q0到Q3的的路徑延時為:Tco+3Tand+Txor+Tsu-Tskew=6.4-1.5=4.9ns,此時從Q0到Q2的線路徑成為關鍵路徑:
Tclk-min = Tco + 2Tand + Txor +Tsu = 1.0 + 2*1.2+1.2+0.6=5.2ns
Fmax = 1/5.2ns = 192.31MHz
在這種情況下,時鐘偏斜會提高時鐘頻率,但如果時鐘偏斜是負的,則會降低時鐘頻率。
由於時鐘偏斜的存在,資料載入到Q3會被延遲,對於所有開始於Q0,Q1,Q2而結束於Q3的路徑,載入的延時會提高觸發器維持時間的要求(Th+Tskew),其中最短的路徑是從Q2到Q3,延遲為Tco + Tand + Txor = 0.8 + 1.2+1.2=3.2ns > Th+Tskew=1.9ns,所以不存在時間違背。
對於時鐘偏斜值Tskew >= 2.8ns情況,可以看出存在時間違背,此時不論時鐘頻率多少,該電路都不可能可靠的工作。
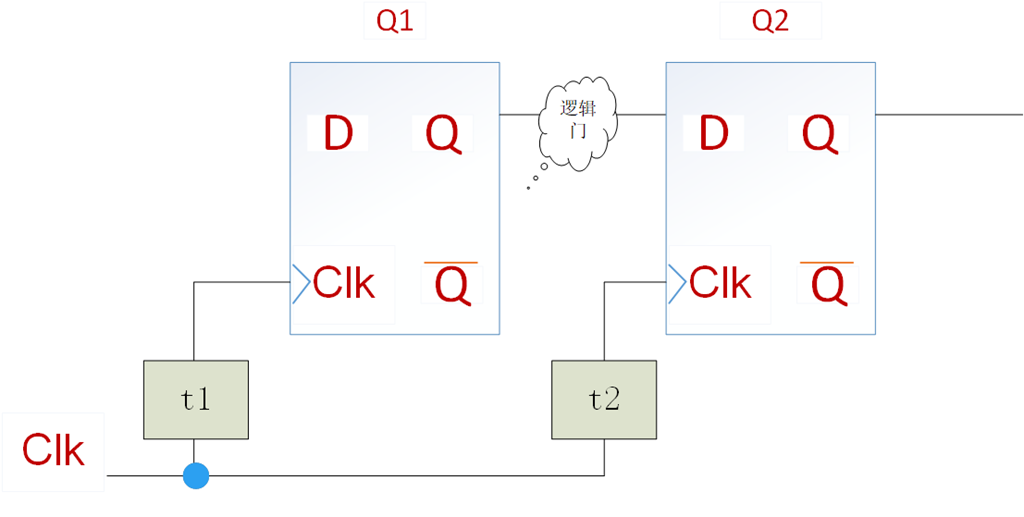
我們再看下面這個例子,在這個電路中有一條路徑開始於觸發器Q1,經過一些邏輯閘網路,在觸發器Q2的D端結束。由圖可知,時鐘訊號到達觸發器前存在不同的延遲。假設觸發器Q1和Q2的時鐘訊號延遲分別為t1和t2,這兩個觸發器之間的時間偏斜可定義為Tskew= t2-t1,假設電路中通過邏輯閘路徑的最長延遲為TL,則這兩個觸發器的最小時鐘週期為Tclk-min=Tco+TL+Tsu-Tskew, 因此如果t2-t1>0,則時鐘頻率會提升,否則時鐘偏斜會降低頻率。
為了計算觸發器Q2是否存在時間違背,需要確定觸發器的最短路徑。如果電路中通過邏輯閘的最小延遲為Tl,且Tl+Tco<Th+Tskew, 將會產生時間違背。如果t2-t1>0,維持時間的限制將更難以滿足,而如果t2-t1<0,則較易滿足。
{kind=link}
原文連結:https://www.cnblogs.com/mikewolf2002/p/10200660.html