
LIN、CAN、FlexRay、MOST,三分鐘搞明白四大汽車總線
LIN、CAN、FlexRay、MOST,三分鐘搞明白四大汽車總線
2016-09-21 13:09汽車中的電子部件越來越多,光是ECU就有幾十個,這麽多的電子單元都要進行信息交互。傳統的點對點通信已經不能滿足需求,因此必須要采用先進的總線技術。
車用總線就是車載網絡中底層的車用設備或車用儀表互聯的通信網絡。目前,有四種主流的車用總線:CAN總線、LIN總線、FlexRay總線和MOST總線。
用一張表格來說明各種總線的區別

LIN總線
LIN(Local Interconnect Network)是面向汽車低端分布式應用的低成本(0.5美元),低速串行通信總線。它的目標是為現有汽車網絡提供輔助功能,在不需要CAN總線的帶寬和多功能的場合使用,降低成本。
LIN聯盟成立於1999年,並發布了LIN01.0版本。最初的成員有奧迪、寶馬、克萊斯勒、摩托羅拉、博世、大眾和沃爾沃等。
LIN相對於CAN的成本節省主要是由於采用單線傳輸、矽片中硬件或軟件的低實現成本和無需在從屬節點中使用石英或陶瓷諧振器。這些優點是以較低的帶寬和受局限的單宿主總線訪問方法為代價的。
LIN包含一個宿主節點和一個或多個從屬節點。所有節點都包含一個被分解為發送和接收任務的從屬通訊任務,而宿主節點還包含一個附加的宿主發送任務。在實時LIN中,通訊總是由宿主任務發起的。
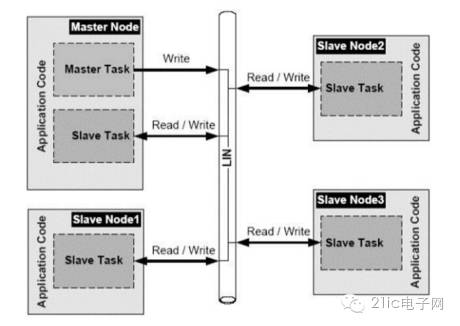
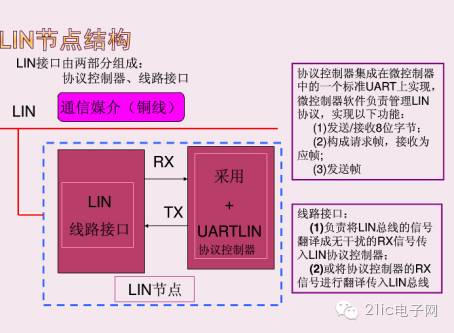
圖 LIN總線結構
除了宿主節點的命名之外,LIN網絡中的節點不使用有關系統設置的任何信息。我們可以在不要求其它從屬節點改變硬件和軟件的情況下向LIN 中增加節點。
宿主節點發送一個包含同步中斷、同步字節和消息識別碼的消息報頭。從屬任務在收到和過濾識別碼後被激活並開始消息響應的傳輸。響應包含兩個、四個或八個數據字節和一個檢查和(checksum)字節。報頭和響應部分組成一個消息幀。
LIN總線上的所有通訊都由主機節點中的主機任務發起,主機任務根據進度表來確定當前的通訊內容,發送相應的幀頭,並為報文幀分配幀通道。總線上的從機節點接收幀頭之後,通過解讀標識符來確定自己是否應該對當前通訊做出響應、做出何種響應。基於這種報文濾波方式,LIN可實現多種數據傳輸模式,且一個報文幀可以同時被多個節點接收利用。
LIN總線物理層采用單線連接,兩個電控單元間的最大傳輸距離為40m。其總線驅動器和接收器的規範遵從改進的ISO 9141 單線標準。基於SCI/UART( 通用異步收發接口的單總線串行通信)協議;目前幾乎所有的微控制器芯片上都有SCI/UART接口。低傳輸速率、小於20kb/s、采用NRZ編碼。
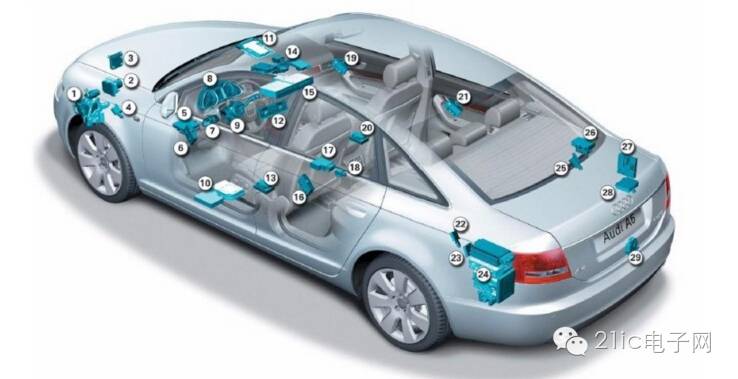
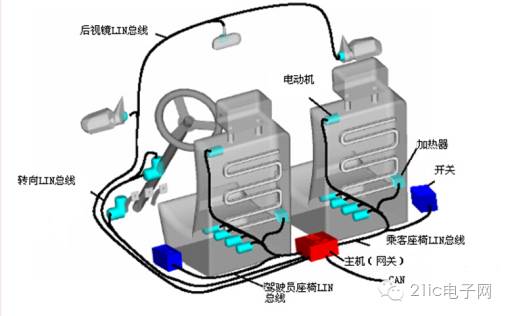
LIN總線在汽車中的應用如下圖所示。
CAN總線
CAN(Controller Area Network)即控制器局域網,可以歸屬於工業現場總線的範疇,通常稱為CAN bus,即CAN總線,是目前國際上應用最廣泛的開放式現場總線之一。
CAN 最初出現在汽車工業中,80年代由德國Bosch公司最先提出。最初動機是為了解決現代汽車中龐大的電子控制裝置之間的通訊,減少不斷增加的信號線。
CAN總線是一種串行數據通信協議,其通信接口中集成了CAN協議的物理層和數據鏈路層功能,可完成對通信數據的成幀處理,包括位填充、數據塊編碼、循環冗余檢驗、優先級判別等項工作。
CAN總線的工作原理可由下面兩圖來說明。
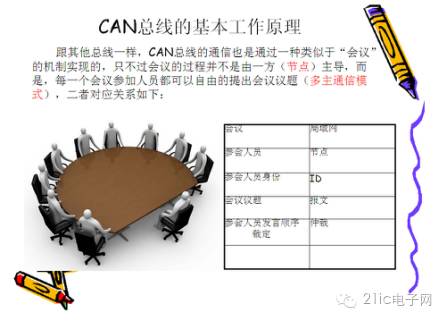
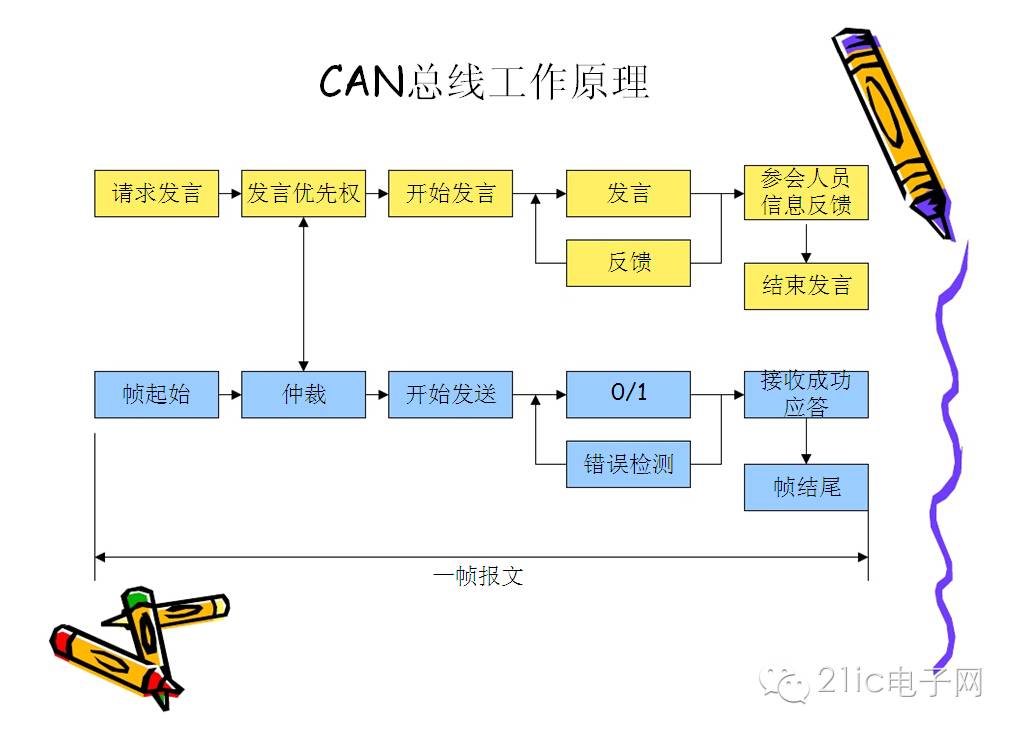
總結下,當一個節點要向其它節點發送數據時,該節點的CPU 將要發送的數據和自己的標識符傳送給本節點的CAN芯片,並處於準備狀態;當它收到總線分配時,轉為發送報文狀態。CAN 芯片將數據根據協議組織成一定的報文格式發出,這時,網上的其它節點處於接收狀態。每個處於接收狀態的節點對接收到的報文進行檢測,判斷這些報文是否是發給自己的,以確定是否接收它。
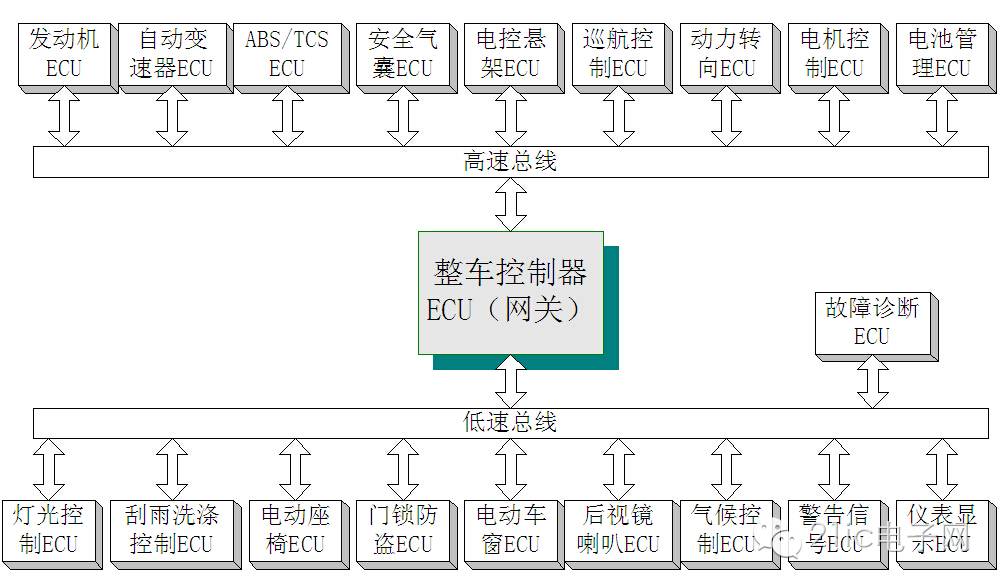
CAN總線的結構是這樣的。
CAN總線的優點很多:
“
·通信速率最高可達1MB/s(此時距離最長40m)。
· 節點數實際可達110個。
· 采用短幀結構,每一幀的有效字節數為8個。
· 每幀信息都有CRC校驗及其他檢錯措施,數據出錯率極低。
· 通信介質可采用雙絞線,同軸電纜和光導纖維,一般采用廉價的雙絞線即可,無特殊要求。
· 節點在錯誤嚴重的情況下,具有自動關閉總線的功能,切斷它與總線的聯系,以使總線上的其他操作不受影響。
FlexRay總線
FlexRay總線是由寶馬、飛利浦、飛思卡爾和博世等公司共同制定的一種新型通信標準,專為車內聯網而設計,采用基於時間觸發機制,具有高帶寬、容錯性能好等特點,在實時性、可靠性和靈活性方面具有一定的優勢。
FlexRay總線數據收發采取時間觸發和事件觸發的方式。利用時間觸發通信時,網絡中的各個節點都預先知道彼此將要進行通信的時間,接收器提前知道報文到達的時間,報文在總線上的時間可以預測出來。即便行車環境惡劣多變,幹擾了系統傳輸,FlexRay協議也可以確保將信息延遲和抖動降至最低,盡可能保持傳輸的同步與可預測。這對需要持續及高速性能的應用(如線控剎車、線控轉向等)來說,是非常重要的。
它采用了周期通信的方式,一個通信周期可以劃分為靜態部分、動態部分、特征窗和網絡空閑時間4個部分。靜態部分和動態部分用來傳輸總線數據,即FlexRay報文。特征窗用來發送喚醒特征符和媒介訪問檢測特征符。網絡空閑時間用來實現分布式的時鐘同步和節點參數的初始化。
FlexRay具有高速、可靠及安全的特點. FlexRay在物理上通過兩條分開的總線通信,每一條的數據速率是10MBit/s。FlexRay還能夠提供很多網絡所不具有的可靠性特點。尤其是FlexRay具備的冗余通信能力可實現通過硬件完全復制網絡配置,並進行進度監測。FlexRay同時提供靈活的配置,可支持各種拓撲,如總線、星型和混合拓撲。FlexRay本身不能確保系統安全,但它具備大量功能,可以支持以安全為導向的系統(如線控系統)的設計。
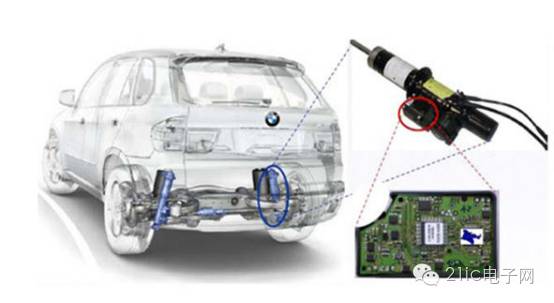
寶馬公司在07款X5系列車型的電子控制減震器系統中首次應用了FlexRay技術。此款車采用基於飛思卡爾的微控制器和恩智浦的收發器,可以監視有關車輛速度、縱向和橫向加速度、方向盤角度、車身和輪胎加速度及行駛高度的數據,實現了更好的乘坐舒適性以及駕駛時的安全性和高速響應性,此外還將施加給輪胎的負荷變動以及底盤的振動均減至最小。
MOST總線
MOST 是一種專門針對車內使用而開發的、服 務於多媒體應用的數據總線技術。 MOST 表示“多媒體傳輸系統”。
MOST 總 線利用光脈沖傳輸數據。MOST 總線采用環形 結構。在環形總線內只能朝著一個方向傳輸數 據。
MOST的傳輸技術近似於公眾交換式電話網絡(Public Switched Telephone Network;PSTN),有著數據信道(Data Channel)與控制信道(Control Channel)的設計定義,控制信道即用來設定如何使用與收發數據信道。 一旦設定完成,資料就會持續地從發送處流向接收處,過程中不用再有進一步的封包處理程序,將運作機制如此設計,最適合用於實時性音訊、視訊串流傳輸。
MOST在制訂上完全合乎ISO/OSI的7層數據通訊協議參考模型,而在網線連接上MOST采用環狀拓樸,不過在更具嚴苛要求的傳控應用上,MOST也允許改采星狀(亦稱放射狀)或雙環狀的連接組態,此外每套MOST傳控網絡允許最多達64個的裝置(節點)連接。
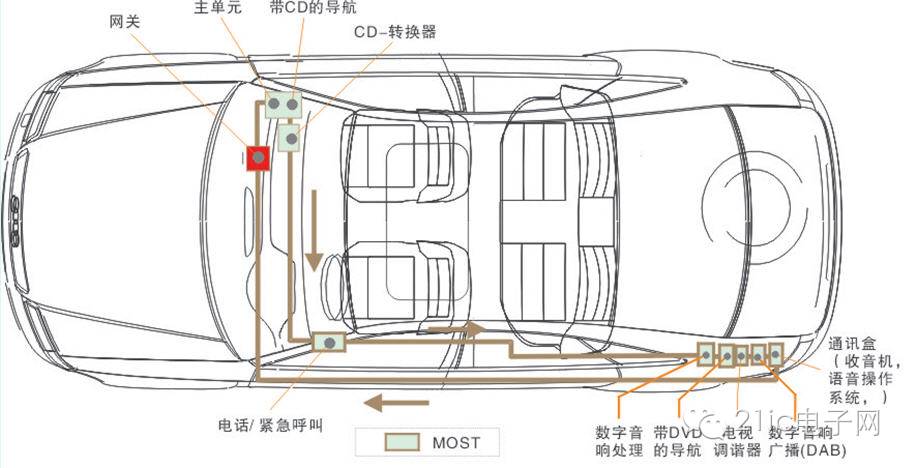
圖 MOST總線的組成
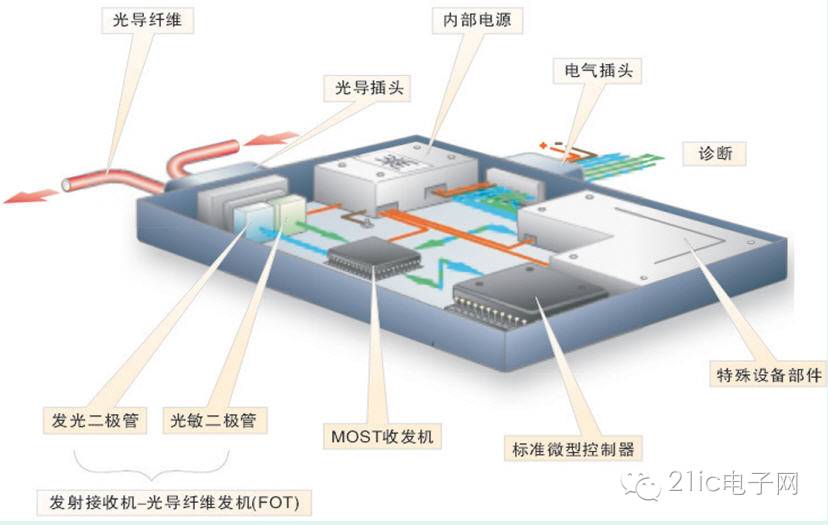
圖 MOST總線的控制單元
MOST也支持隨插即用(Plug and Play;PnP)機制。
MOST總線基於環形拓撲,從而允許共享多個發送和接收器的數據。MOST總線主控器(通常位於汽車音響主機處)有助於數據采集,所以該網絡可支持多個主拓撲結構,在一個網絡上最多高達64個主設備。
MOST的總數據傳輸率為24.8Mbps,這已是將音視訊的串流資料與封包傳控資料一並列計,在24.8 Mbps的頻寬中還可區隔成60個傳輸信道、15個MPEG-1的視訊編碼信道,這些可由傳控設計者再行組態、規劃與調配。
由於這些優點,MOST是汽車電子中應用最多的最佳多媒體傳控網絡。
總結
CAN總線是中堅,LIN是CAN的副手,FlexRay是未來的希望,MOST則負責文化事業。這四種總線將在未來繼續大放異彩。
LIN、CAN、FlexRay、MOST,三分鐘搞明白四大汽車總線