
六自由度機械臂控制系統設計與運動學模擬-論文筆記整理
1. 機械臂系統主要包括機械、硬體和軟體、演算法四個部分,到具體設計需要考慮結構設計、控制系統設計、運動學分析、動力學分析、軌跡規劃研究、路徑規劃研究、運動學動力學模擬等部分
2. 如果智慧機器人自己可以通過學習、總結經驗來獲得修改程式的原則,便是高階智慧機器人,也就是第三代機器人。結合深度學習與機器學習的機器人
3. 機械臂有六個自由度,前三個可以用做確定位置,後三個可用做確定姿態。這六個自由度的分配方式.是最優化的自由度分配方式,很多工業機器人都採用這種形式。後三個自由度的軸線交於一點,可以作為機械臂的手腕,這種構性的優點是它存在利於表示和計算的封閉逆解。
4. 軌跡規劃研究一類是沿著一條預設連續路徑的最優時間動作軌跡演算法
5. 本章將分析六自由度機械臂的構型,建立機械臂的參考座標系以及各關節的座標系,利用標準D-H引數法推匯出正運動學模型,採用機器人工具箱進行模擬。接著採用代數法推匯出逆運動學模型,並進行模擬驗證
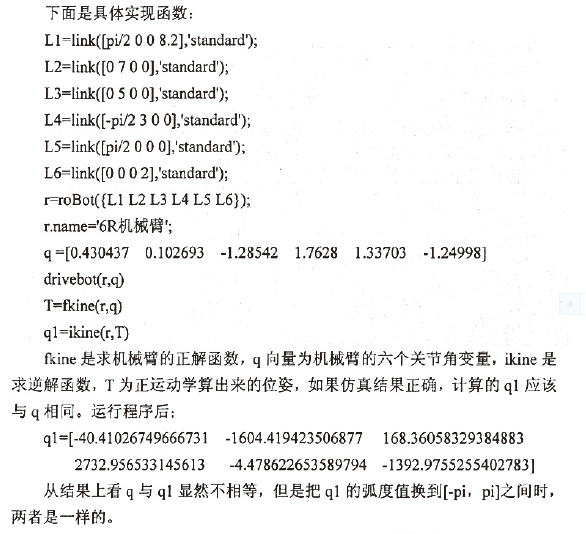
6. 正運動學模擬,MATLAB具體實現函式:

7. 逆運動學模擬
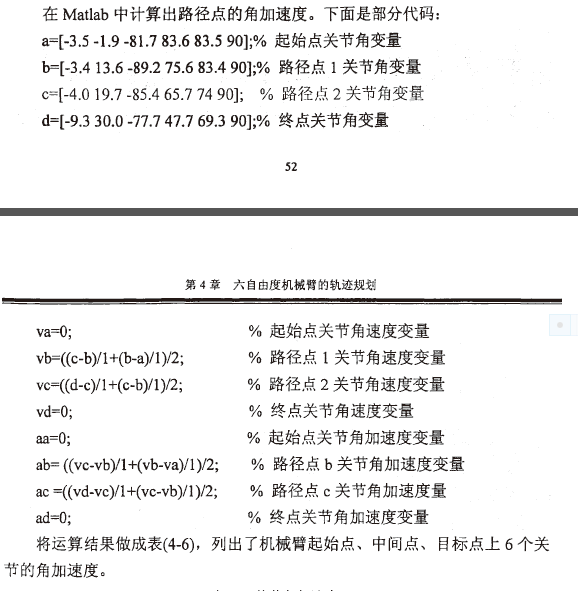
8. 運動規劃
運動規劃還包括路徑規劃。路徑和軌跡是兩個不同概念。路徑與時間無關,表示機械臂空間位姿的連續序列。軌跡是機械臂位姿關於時間的函式。路徑演算法包括空間法,人工勢場法,假設一修正法,預處理—覿划算法。
a) 三次多項式插值演算法

b) OpenGL中的畫圓柱函式gluCylinder(obj,3.0f,3.0f,8.2f,100,1)實現,其中obj表示材質,3.0f表示杆兩個截面的半徑,8.2f表示杆長
c) 五次多項式插值
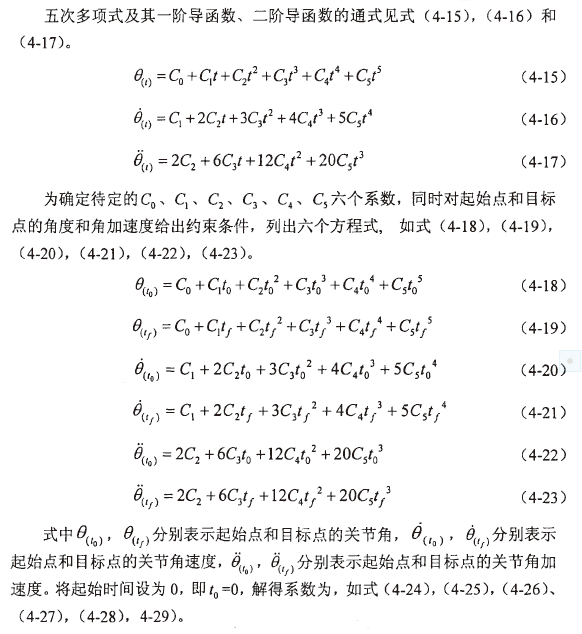
缺點:
無法保證機械臂末端在笛卡爾空間(直角座標空間)嚴格的沿特定的軌跡運動,更無法直接約束各個點的姿態變化
d) 空間直線插補

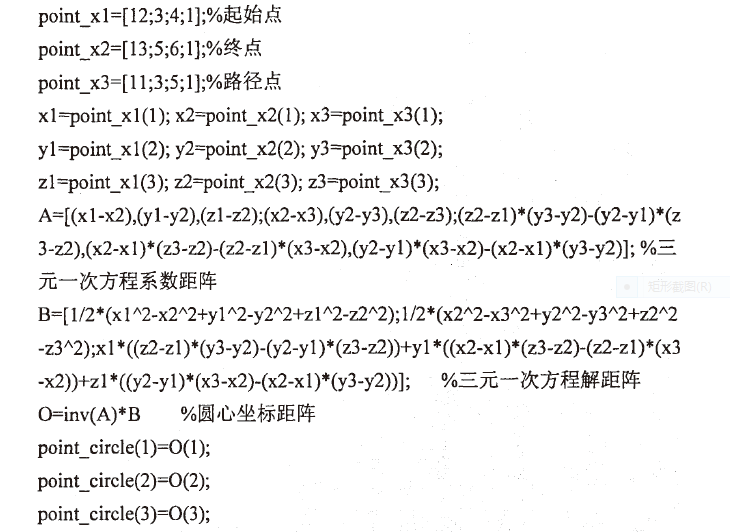
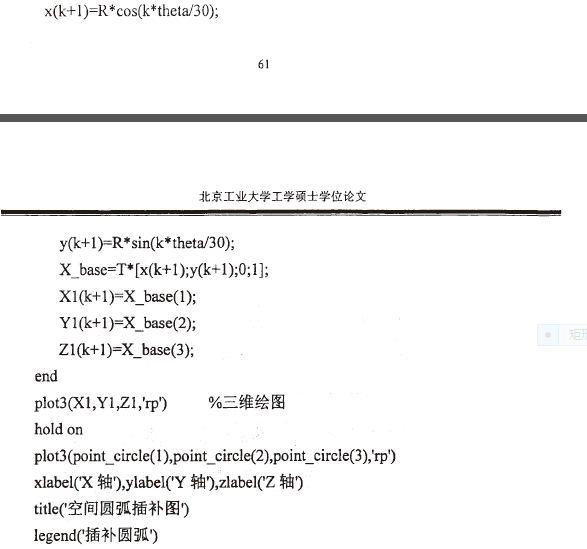
e) 空間圓弧插補
第一步將空間圓弧轉化為平面圓弧:第二步利用平面圓弧插補演算法,求出平面圓弧插補點的座標值;第三步將這些點的座標值轉化為空間基礎座標系下的座標值

9. 總結
還有基於OpenGL的六自由度機械臂三維模擬工具的設計章節沒總結進去。全篇論文內容豐富,涵蓋機器人學大部分內容。其中MATLAB程式碼模擬是重點,需要自己循著論文輸入程式碼模擬一遍。此博文是隻是提煉我認為的重要點,而後還需要消化為自己的精簡總結。