
【Python】曲線簡化演算法實現
阿新 • • 發佈:2018-11-01
Overview
曲線簡化演算法通常應用於運動捕捉資料的關鍵幀提取,在此基礎上還演化出了更多的演算法
本文對基本的曲線簡化演算法進行了程式碼實現,以關鍵幀個數或線性重建誤差作為迭代終止條件
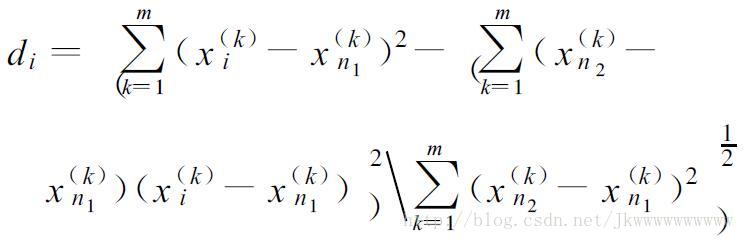
其中,計算點i到直線n1-n2的距離公式如下[1]:
更多演算法及分析可參考[2]
Code
註釋中提供一些簡單的說明以便於理解
#!/usr/bin/env python
#-*- coding: utf-8 -*-
#######################
# Info : Curve Simplify
# Version 1.0
# Author : Alex Pan Reference
[1] 楊濤,肖俊,吳飛,莊越挺. 基於分層曲線簡化的運動捕獲資料關鍵幀提取
[2] 楊濤. 人體運動捕獲資料關鍵幀提取演算法研究