
《裝置驅動程式》--Jonathan corbet,Alessandro rubini & Greg kroah-hartman
第二章 構造和執行模組
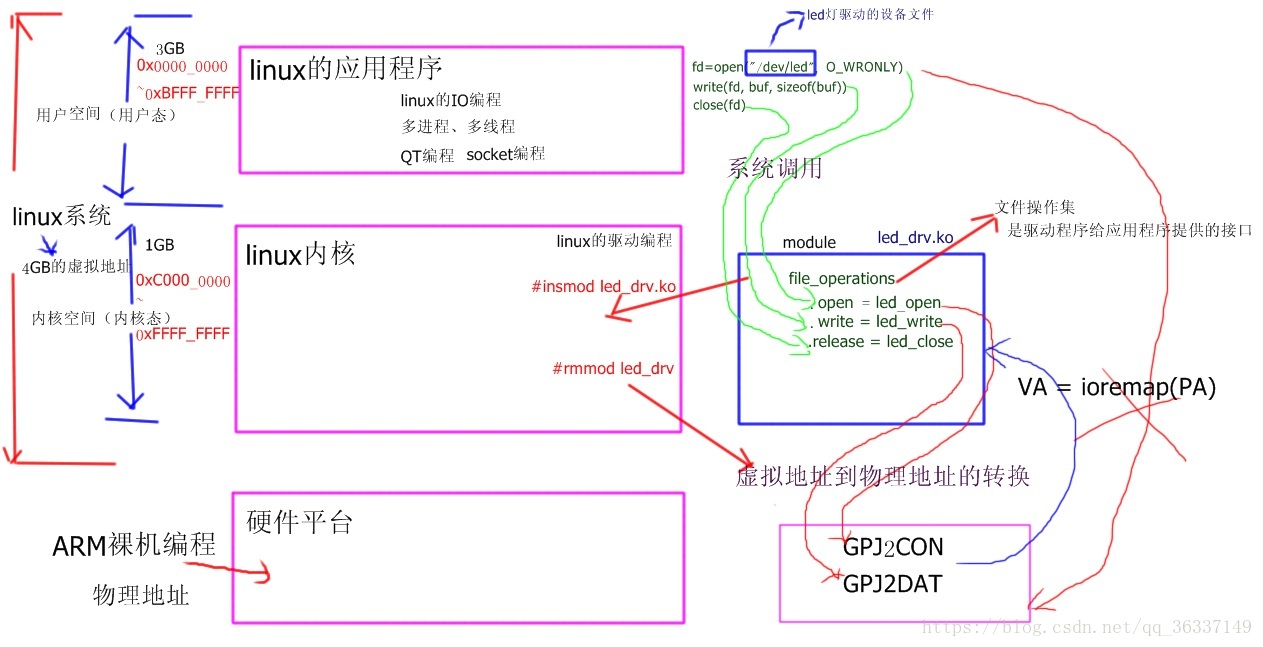
2.1核心模組與應用程式的對比
- 1、應用程式可以是C的庫函式,而驅動程式只能使用linux核心原始碼中的函式,而不能使用C的庫函式。
- 2、應用程式是有main函式的;而驅動程式沒有main函式
- 3、驅動程式有自己的入口和出口;而應用程式只有入口(main)
- 入口:#isnmod demo.ko —>module_init()---->led_init()---->建立裝置驅動模型,並將驅動加入核心
- 出口:#rmmod demo —>module_exit()---->led_exit()---->釋放裝置驅動模型,並驅動從核心中刪除
- 4、驅動設計的程式要嚴謹,如果驅動有錯,就會造成出錯,嚴重情況下會造成核心崩潰或宕機
- 5、驅動程式設計要注意程式碼的可移植性。

2.2使用者空間和核心空間
- 1、應用程式執行在使用者空間,模組執行在核心空間
- 作業系統的作用是為用用程式提供一個對計算機硬體的一致檢視
相關推薦
《裝置驅動程式》--Jonathan corbet,Alessandro rubini & Greg kroah-hartman
第二章 構造和執行模組 2.1核心模組與應用程式的對比 1、應用程式可以是C的庫函式,而驅動程式只能使用linux核心原始碼中的函式,而不能使用C的庫函式。 2、應用程式是有main函式的;而驅動程式沒有main函式 3、驅動程式有自己的入口和出口;而應用程式
字元裝置驅動程式的三種寫法
驅動工程師如何去寫驅動程式? 要看原理圖。確定如何去操作硬體。 對於點亮led燈來說,確定引腳,檢視晶片手冊,確定如何去操作引腳,要設定哪些暫存器,如何設定這些暫存器才可以讓這個引腳輸出高電平或者低電平。 寫驅動程式 驅動程式起封裝作用,如何封裝。應用程式要操作硬體需要o
手動切換 Kinect 的驅動程式(for OpenNI 1.* & Microsoft Kinect SDK 1.7)
微軟最近推出了最新版的 Kinect SDK ,能夠實現實時的 Kinect Fusion,並提供了豐富的手勢互動功能,對體感互動開發人員的吸引力越來越大。而 OpenNI 2.0 以上的版本也轉為使用微軟官方的 Kinect 驅動,也顯示了 Kinect 驅動一體化的大趨勢。不過目前大部分 Kin
塊裝置驅動程式之一
一、塊裝置概述 linux支援的兩種重要的裝置型別分別是字元裝置和塊裝置,塊裝置可以隨機地以固定大小的塊傳送資料。與字元裝置相比,塊裝置有以下幾個特殊之處: 塊裝置可以從資料的任何位置進行訪問 塊資料總是以固定長度進行傳輸,即便請求的這是一個位元組 對塊裝置的訪問有大量的快
光碟安裝win7系統顯示缺少所需的cd dvd驅動器裝置驅動程式
注意:必須用內建光碟機才會好使。 這樣的問題是由於安裝版映象中不帶USB3.0驅動,安裝介質插到USB3.0介面導致。可以換到USB2.0的介面或是把USB3.0介面的裝置拔掉。 如果上面方法不行,則用下面方法: 1、首先進入BIOS,在BIOS中-Config-USB-USB3.0
《Linux Device Drivers》第十六章 塊裝置驅動程式——note
簡介 一個塊裝置驅動程式主要通過傳輸固定大小的隨機資料來訪問裝置 Linux核心視塊裝置為與字元裝置相異的基本裝置型別 Linux塊裝置驅動程式介面使得塊裝置可以發揮其最大的功效,但是其複雜程式又是程式設計者必須面對的一個問題 一個數據塊指的是固
作業系統 第六章 2 中斷 + 裝置驅動程式
1、中斷是I/O系統最低的一層,也是裝置管理的基礎。 2、中斷和陷入 區分: 中斷:CPU對I/O裝置發來的中斷訊號的一種響應,中斷是由外部設備引起的,又稱外中斷。 陷入:由CPU內部事件所引起的中斷,通常把這類中斷稱為內中斷或陷入(tra
字元裝置驅動程式之非同步通知
非同步通知: 驅動程式的所謂非同步通知,指的是應用程式不是主動對驅動程式進行操作,而是驅動程式查詢到有事件發生或者有資料發生變化的時候通知應用程式。角色發生了變化,應用程式由主動改為被動執行。 比如按鍵驅動: 1、要不斷進行查詢引腳狀
linux misc device字元雜項裝置驅動程式
雜項裝置也是在嵌入式系統中用得比較多的一種裝置驅動。miscdevice共享一個主裝置號MISC_MAJOR(即10),但次裝置號不同。misc裝置其實就是特殊的字元裝置,主裝置編號採用10,並且可自動生成裝置節點。 雜項裝置作為字元裝置的封裝,為字元裝置提供的簡單的程
淺析字元裝置驅動程式__register_chrdev_region
在 2.4 的核心我們使用 register_chrdev(0, “hello”, &hello_fops) 來進行字元裝置裝置節點的分配,這種方式每一個主裝置號只能存放一種裝置,它們使用相同的 file_operation 結構體,也就是說核心最多支
PCI裝置驅動程式
一、PCI裝置驅動編寫 PCI匯流排是現在非常流行的計算機匯流排,學會它的驅動設計方法很重要。相信曾經想學習PCI匯流排驅動的人有這麼一個經歷,就是去看那些講解PCI匯流排驅動的書籍和資料的時候,會被裡面繁雜的內容所擊敗,又是什麼配置空間又是什麼列舉的,還沒開
《精通Linux 裝置驅動程式開發》下載
2018年11月02日 14:24:20 茹粿鰅莧丨你 閱讀數:1 標籤: 程式設計 資料 區
裝置管理---裝置驅動程式、裝置無關性、緩衝區管理
一、裝置驅動程式 裝置驅動程式是I/O系統的高層與裝置控制器之間的通訊程式。其主要任務: ①接收上層軟體發來的抽象I/O要求,如read、write等命令; ②再把它轉化為具體要求,傳送給裝置控制器,啟動裝置去執行。 ③反方向,它也將由裝置控制器發來的訊號,傳送
Linux裝置驅動程式架構分析之一個I2C驅動例項
作者:劉昊昱 核心版本:3.10.1 編寫一個I2C裝置驅動程式的工作可分為兩部分,一是定義和註冊I2C裝置,即i2c_client;二是定義和註冊I2C裝置驅動,即i2c_driver。下面我們就以mini2440的I2C裝置at24c08 EEPROM為例,介紹如
Linux裝置驅動程式架構分析之I2C架構(基於3.10.1核心)
作者:劉昊昱 核心版本:3.10.1 I2C體系架構的硬體實體包括兩部分: 硬體I2C Adapter:硬體I2C Adapter表示一個硬體I2C介面卡,也就是I2C控制器。一般是SOC中的一個介面,也可以用GPIO模擬。硬體I2C Adapter主要用來在I2
Linux裝置驅動程式學習(基於2440的GPIO字元裝置驅動)
GPIO驅動程式如下: #include <linux/module.h> #include <linux/kernel.h> #include <linux/errno.h> #include <linux/string.h> #include <li
深入linux裝置驅動程式核心機制(第九章) 讀書筆記
第9章 linux裝置驅動模型 本文歡迎轉載, 請標明出處 本文出處: http://blog.csdn.net/dyron 9.1 sysfs檔案系統 sysfs檔案系統可以取代ioctl的功能. sysfs檔案系統
教你寫Linux裝置驅動程式:一個簡短的教程
摘自:http://blog.chinaunix.net/uid-20799298-id-99675.html 原文為 Writing device driver in Linux:A brief tutorial. 該文重點給出了三個例項來講解Linux驅
Linux下PCI裝置驅動程式開發基本框架
PCI是一種廣泛採用的匯流排標準,它提供了許多優於其它匯流排標準(如EISA)的新特性,目前已經成為計算機系統中應用最為廣泛,並且最為通用的匯流排標準。Linux的核心能較好地支援PCI匯流排,本文以Intel 386體系結構為主,探討了在Linux下開發PCI裝置驅動程式的基本框架。 一、PCI匯流排
Linux裝置驅動程式安裝fatal error: linux/module.h: No such file or directory
在做Linux裝置驅動程式安裝實驗時,執行gcc -c mydev.c產生fatal error: linux/module.h: No such file or directory錯誤資訊 mydev.c程式碼如下: #ifndef __KERNEL__ #define