
虛擬參考站(VRS)
來源:https://www.sohu.com/a/149415053_391994
一、高精度定位
VRS是虛擬參考站(Virtual Reference Station)的簡稱。這項技術是CORS應用的一種,資料處理中心24小時連續不斷地根據各基準站所採集的實時觀測資料在區域內進行整體建模解算,通過建立精確的誤差模型(如電離層、對流層、衛星軌道等誤差模型),在移動站附近產生一個物理上並不存在的虛擬參考站(VRS),由於虛擬參考站的位置是通過流動站接收機(可以是手機,需要裝一個App,或者直接用魔盒)的單點定位解來確定,故其與移動站構成的基線通常只有幾米到十幾米,移動站與虛擬參考站進行載波相位差分改正,實現實時RTK。
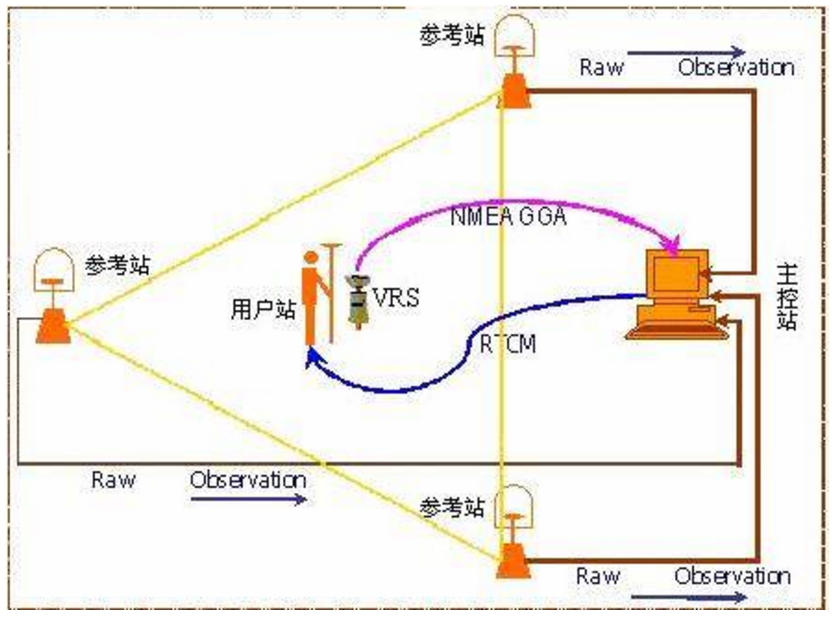
VRS最突出優勢是覆蓋範圍更廣:VRS網路中固定參考站的距離增大,站間距離可達到70KM,三個站覆蓋的面積可以達到2100多平方公里。以北京為例,城區面積為900多平方公里,三個參考站即可覆蓋,北京市面積1.68萬平方公里,十個參考站即可覆蓋。
但是VRS的缺陷也是很明顯的:
(1)採用雙向通訊,限制了它的同時線上使用者數量。
(2)虛擬參考基站隨著使用者(流動站)的移動(超過一定距離)要重新初始化,並且是不可追蹤、不可重複的虛擬的參考基站。
(3)人為的規定了一個參考站站網中參考站的數量,一般情況下為三個。它們是由參考站軟體所決定的,用於計算流動站所需要的改正數。此項約束限制了系統採用合適數量的參考站解決占主導地位的大氣條件,例如建立大尺度氣象活動的模型問題。這種約束也影響到成果的穩定性,並表現出對網路的幾何形態及對資料的傳輸損耗十分敏感。如果三個站中有一個站不能為這個網路提供資料,那麼網路軟體必須搜尋另外一個合適的參考站,併為使用者重新安排改正計算。在搜尋過程中,沒有網路改正數可以提供給流動站使用者,影響外業生產的效率。
(4)其播發的資料格式不標準,偏向某一型別的接收機。畢竟天寶還是希望你買它的接收機的。
當然還有一種不依賴GPS的高精度定位,那就是鐳射雷達和DR(慣導)。
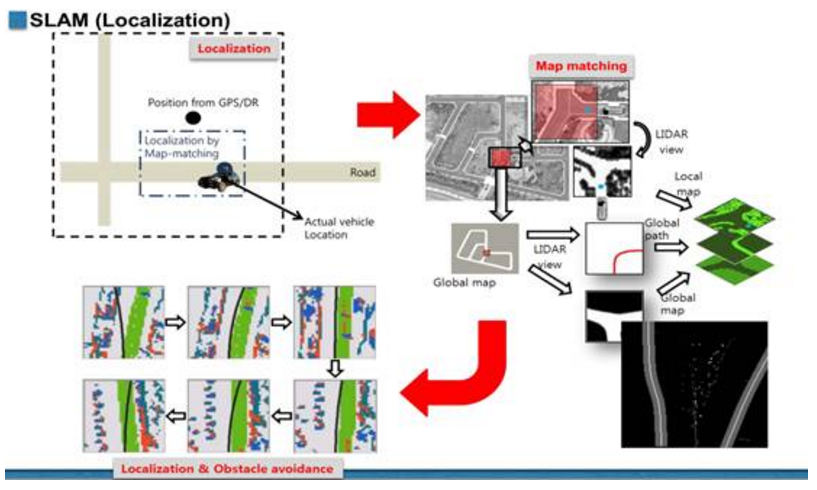
這種定位有一個前提就是必須有一張用鐳射雷達繪製的先驗(Prior)地圖,這個工作量太大了,顯然很難大規模推廣。
二、中國國情
為保障國家安全,所有在中國執行的地圖服務商要加裝“國家保密外掛”(亦稱加密外掛、加偏或SM模組)。此外掛會將真實的座標加密成虛假的座標,且此加偏並非線性加偏,所以各地的偏移情況都會有所不同。這就是GCJ-02,它是一種對經緯度資料的加密演算法,即加入隨機的偏差。 國內出版的各種地圖系統(包括電子形式),必須至少採用GCJ-02對地理位置進行首次加密。某些線上地圖會採用二次加密來保護自己的商業利益。
三、高精度地圖標準之爭
一流企業做標準,高精度地圖的標準自然不會統一。
電子地圖資料格式,有交換格式與物理格式之分。 所謂交換格式,常常是ASCLL碼的,資料冗餘量大,其目的是為了充分的記錄資訊,傳遞給使用方。簡言之,交換格式的檔案,常常是給人看的,讓人很容易能看明白它。例如,MapInfo的MIF格式,就是典型的交換格式。而物理格式,常常是二進位制的,緊湊高效,彼此之間的關係常常通過地址來偏移,其目的是為了給計算機使用的,追求的目標是小、快。例如,MapInfo的MAP格式,就是典型的物理格式。
導航電子地圖格式分為母庫格式、交換格式和儲存格式三個層次,格式對導航功能的實現非常重要。母庫格式:是導航資料編輯、儲存直接進行的格式,主要是方便於編輯和儲存,如TAB格式。交換格式:是可以轉換到各個應用導航資料的格式,一般都是公開格式,以方便進行轉換應用,如GDF格式。四維用NIMIF格式,高德用AXF格式,瑞圖用RTM格式。儲存格式:本意是指資料在計算機裡儲存的格式,但是儲存格式在導航一般是指導航應用格式,如KIWI格式。母庫和交換格式是導航地圖廠家自己獨有的,要統一格式主要是儲存格式。目前市場上導航產品的物理儲存格式種類繁多,粗略統計不下三十餘種,這樣勢必會出現一個服務中心應對眾多個性化終端處理的難題。因此從實用的角度看,推廣採用統一資料規格或儲存格式是一個比較優化的策略。
針對上述問題,國內外專家已經啟動了新一代可以支援增量更新的導航電子地圖儲存標準的研究,其中比較有影響力的有日本的KIWI3.0和歐洲的NDS。目前來看,NDS勝算較大。支援NDS的廠家主要有寶馬、賓士、日產、大眾、沃爾沃、現代和雷諾。日系和美系目前還沒有采納NDS系統。
三、高精度地圖的製作
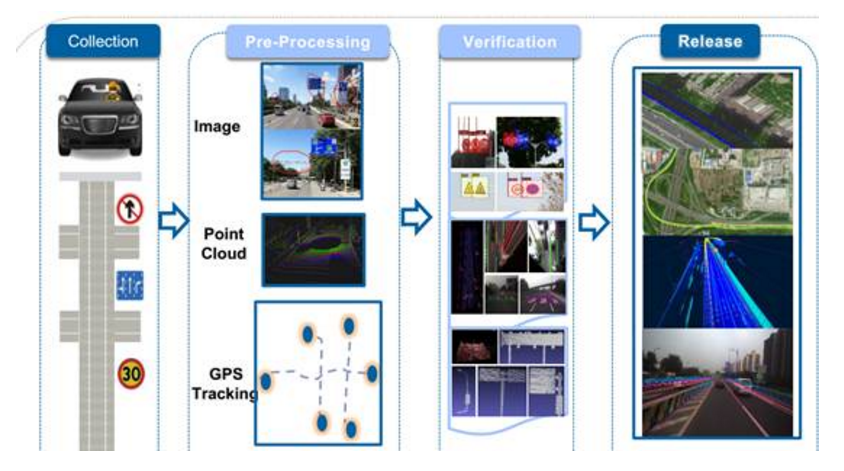
上圖為典型的高精度地圖製作流程。高精度地圖是自動駕駛環境感知的一部分,為自動駕駛的全域性路徑規劃和區域性路徑規劃提供支援。這包括高精度定位能力 HD Localization, 橫向/縱向精確定位Lateral/Longitudinal Positioning, 運動規劃Motion Planning, 基於車道模型的二次規劃 Motion Planning with lanemodel, 智慧調速 Acceleration/deceleration, 轉向和引導 Steering and guidance。
高精度地圖的主要內容
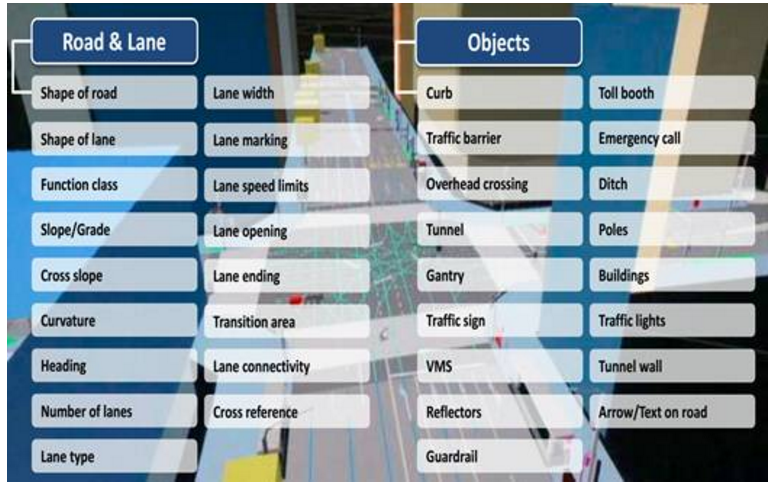
lane opening:車道開始,(此處翻譯不一定準確。)
lane ending:車道結束.
transition area:過渡區.
cross reference:交叉路口參照.
ditch:溝渠
gantry:交通龍門架
pole:杆
guardrail:護欄
toll booth:收費亭
reflector:反射鏡
VMS:Velocity-Measuring System 速度測量系統
overhead crossing:高架路口

顯然,Mobileye那種眾包式的離高精度地圖相去甚遠。因為單目攝像頭對距離的計算是完全是2D的,平面的,其距離是根據畫素大小估算的,誤差可達數米以上。
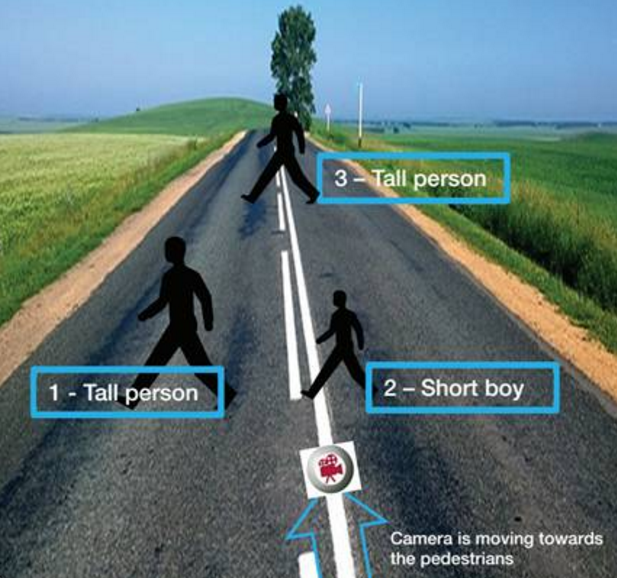
由於距離因素,上圖中行人3和行人2的畫素大小是非常接近的,但行人2和行人3與車輛距離距離差別很大,單目無法得出準確的距離。完全達不到高精度地圖所需要的精度,更不要說不能在夜晚和光線變化較大的場合(林蔭道或隧道)使用了。
高精度地圖必須依賴鐳射雷達。