
2.機器學習基石 | 感知器
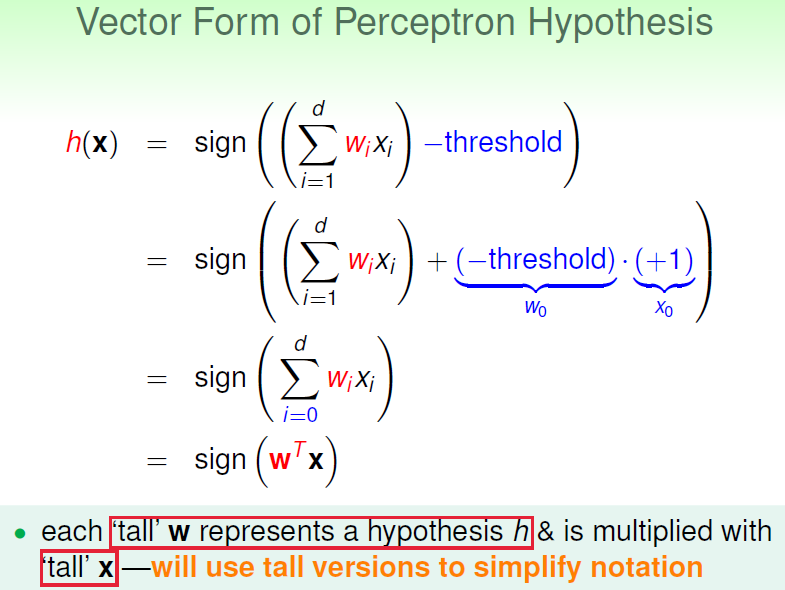
Perception感知器(用於線性二分類)
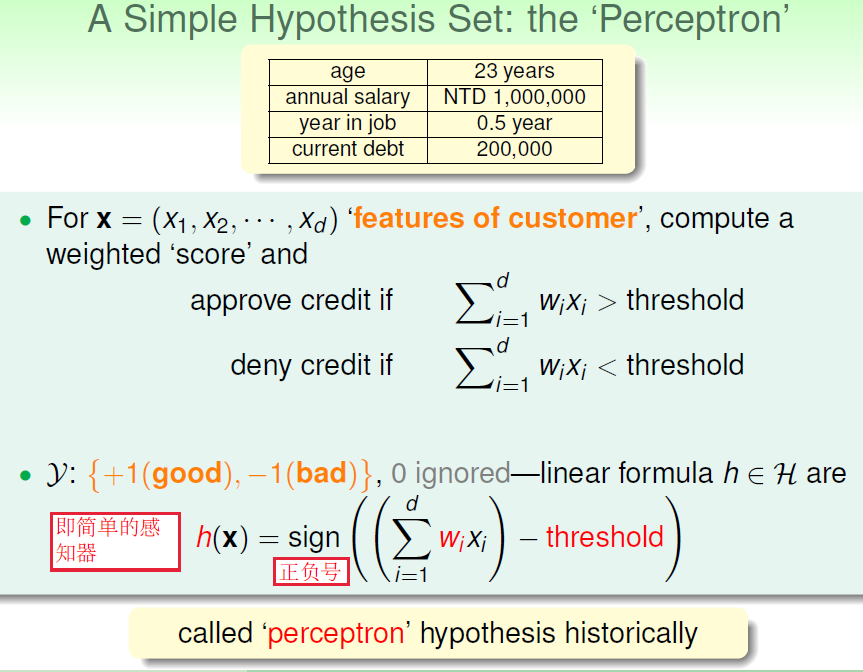
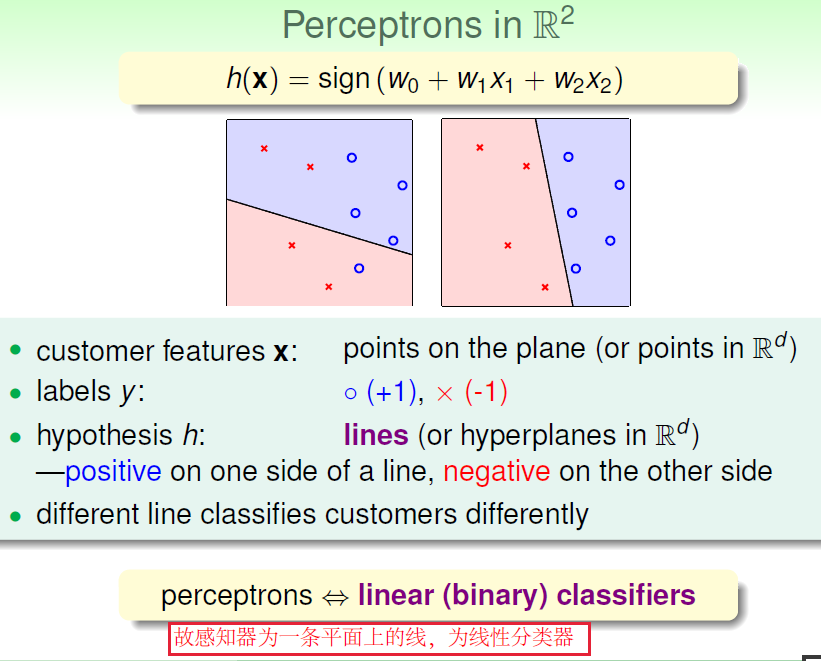
PLA演算法:怎樣從假設空間中找到g
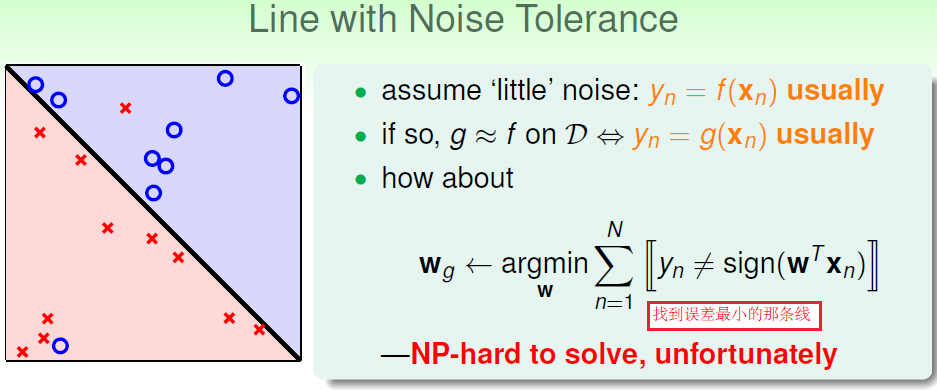
1.目標:克約等於女,最好的結果,但是˚F未知此方法不行
2.目標:使得在給定資料上兩者預測結果接近
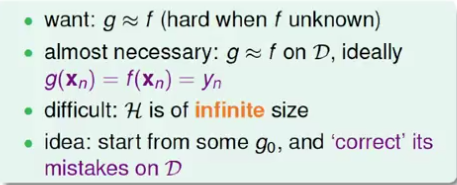
3.感知器優化演算法(PLA)
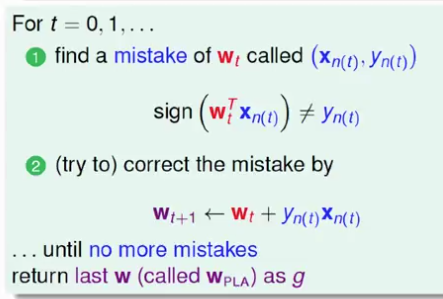
上述公式的理解:
(1)y是正的,出來結果w是負的
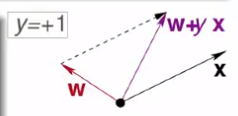
通過w + x,講w拉回來一點(作為新的分介面法向量,此圖中黑色x為原分介面法向量)
( 2)Y是負的,出來結果瓦特正的英文的
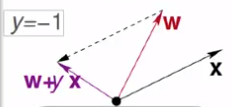
通過W + X,講瓦特拉過去一點
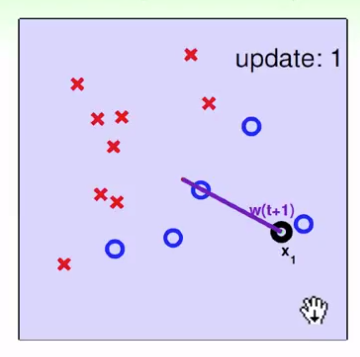
舉例:
(1)最開始沒有線
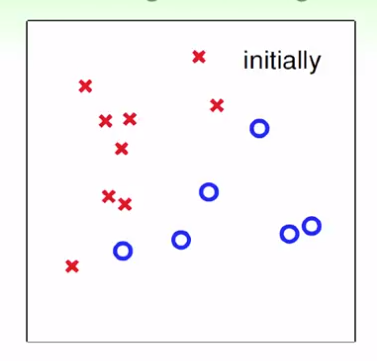
(2)預設每個點都是錯的,找到任意一點與原點連線(原點在圖中間),而這個點剛好為正(圈為正,叉為負),即為分介面的法向量
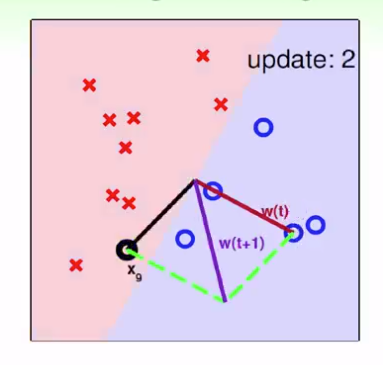
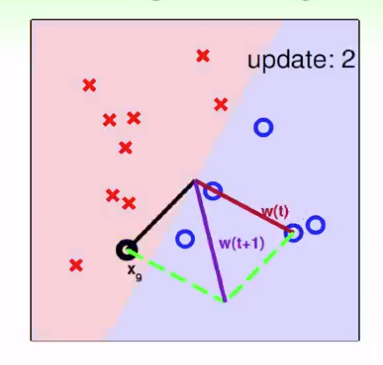
(3)
黑點為分類錯誤的點,與原法向量相加,產生紫色線,即可以調整分介面,紫色作為新的法向量,如此持續,沒有直到分類照片錯誤
思考:
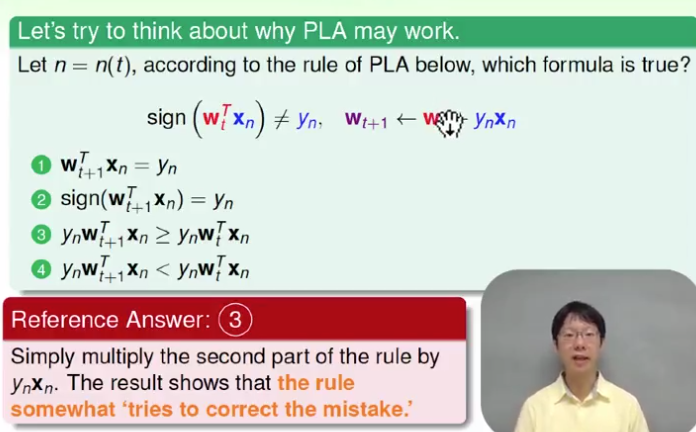
通過一次的調整,可以使得錯誤的點偏向正確一點點,但不是完全保證一定正確
解放軍終止條件
1.PLA保證:資料必須線性可分
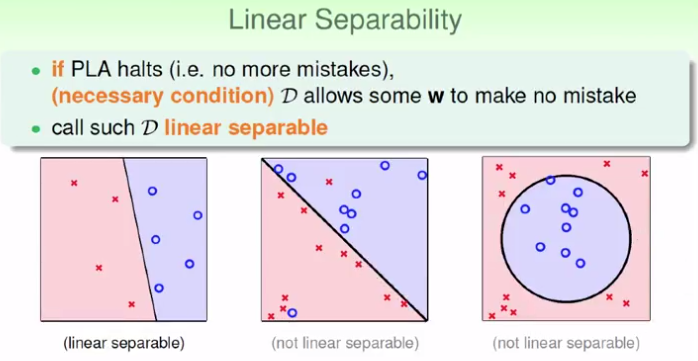
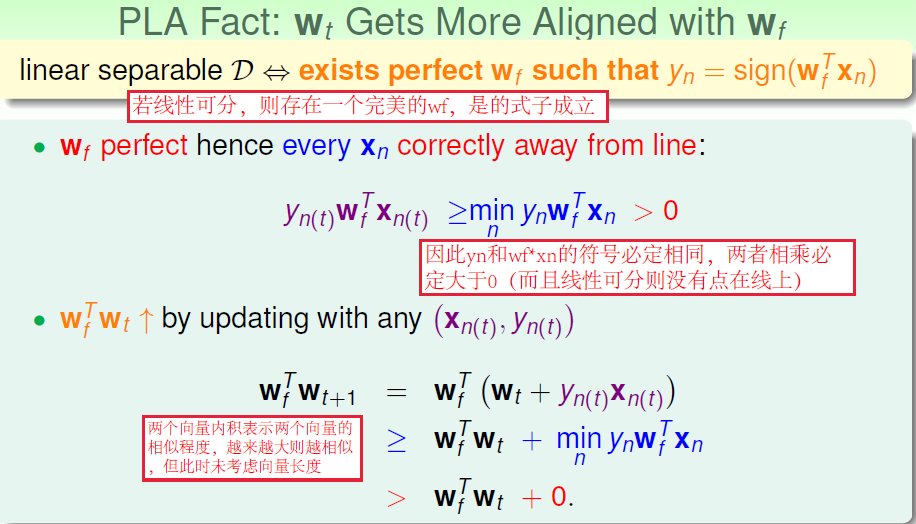
2.PLA條件1:線性可分
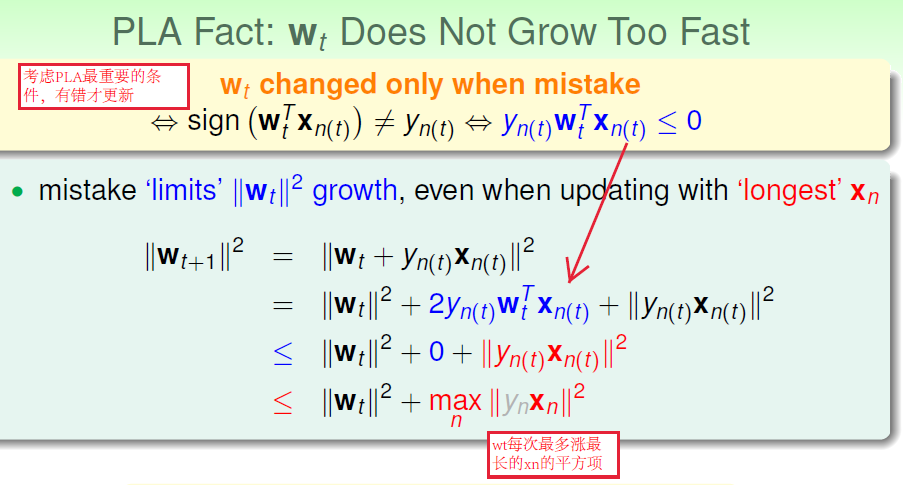
3.PLA條件2:有錯才更新
結合條件1和2的結論:令

則由(1)得:
對於第T次更新,
(因為):
由(2)得
對於第Ť次更新,
從而(1)結果除以(2):
而 即兩個向量的相似度,最大不超過1,故
,最大更新次數 T 不超過
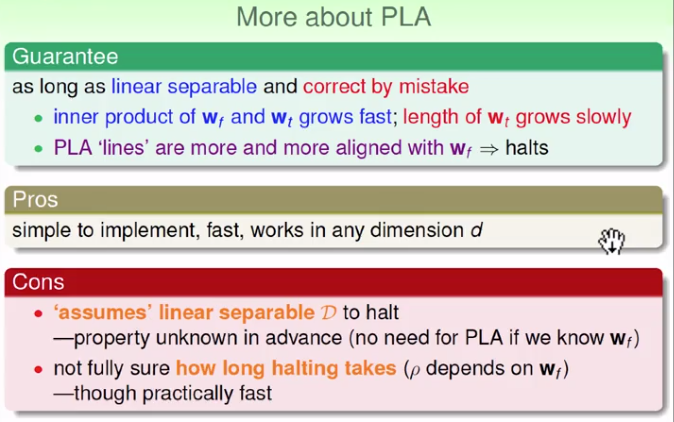
PLA優缺點分析
(1)優點:比較容易去實現
(2)缺點:
1.假定資料線性可分,但事實上我們不知道資料的分佈
2.不確定多久才會終止,因為上述條件中的
與
有關,但
未知
解決上述缺點
即使資料線性可分,當資料有噪聲時PLA應該如何停止?
解決方法:
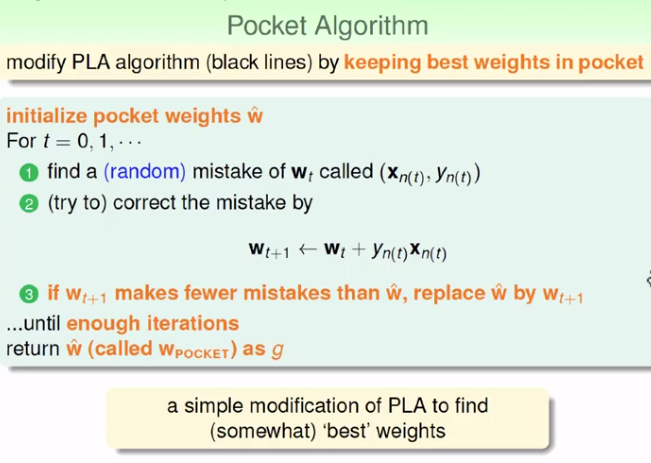
1.口袋演算法(貪心演算法,PLA的一個變形)
兩者比較:
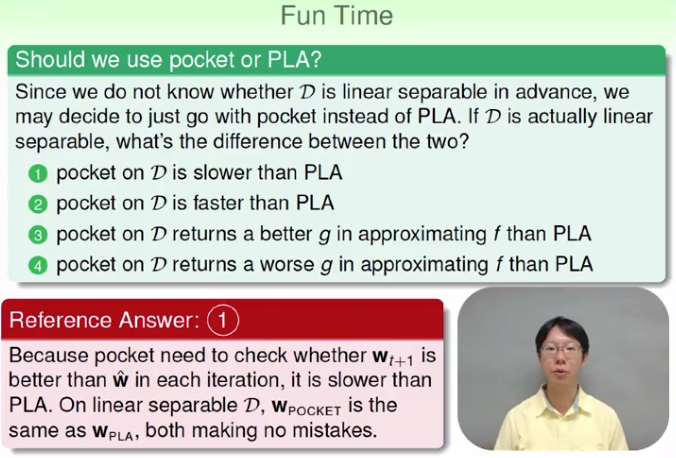
當線性可分時,口袋演算法對於每條線,需要找出所有錯誤分類的點,而PLA只需要找到一個即可