
機器人硬體知識儲備(一) —— 移動平臺
前言
一個真實的機器人系統不單單由軟體組成,硬體也是一個絕對不能缺少的部分。更多情況下,在外界人士眼裡,硬體才是機器人的主體。那麼身處機器人行業的程式猿們怎麼能不具備對機器人硬體有最基本的知識儲備呢?
0. 移動平臺:
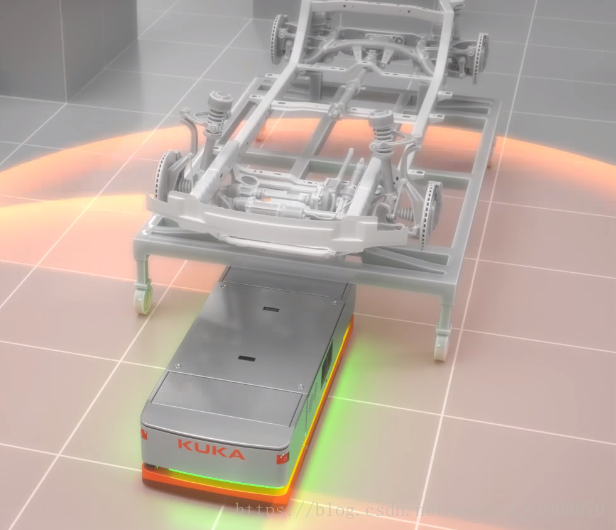
近年來,AGV在智慧物流、智慧工廠中投入應用,機器人移動平臺開始以一種全新的姿態進入普通人的視野。比如下圖的KUKA KMP 1500
很多機器人具備四處移動的能力,移動平臺就是一些執行器為了達到移動的目的而組成的結構。
雖然在機器人研究領域裡,雙足機器人是一個十分受歡迎的課題,但是由於輪子結構簡單,工業上容易生產,再加上輪子的穩定性優良,對於常見的機器人工作環境(比如:平滑的地面,崎嶇的地面)還是輪子較為節能,所以絕大多數機器人依然使用輪子來驅動。
0.0 兩輪差分驅動
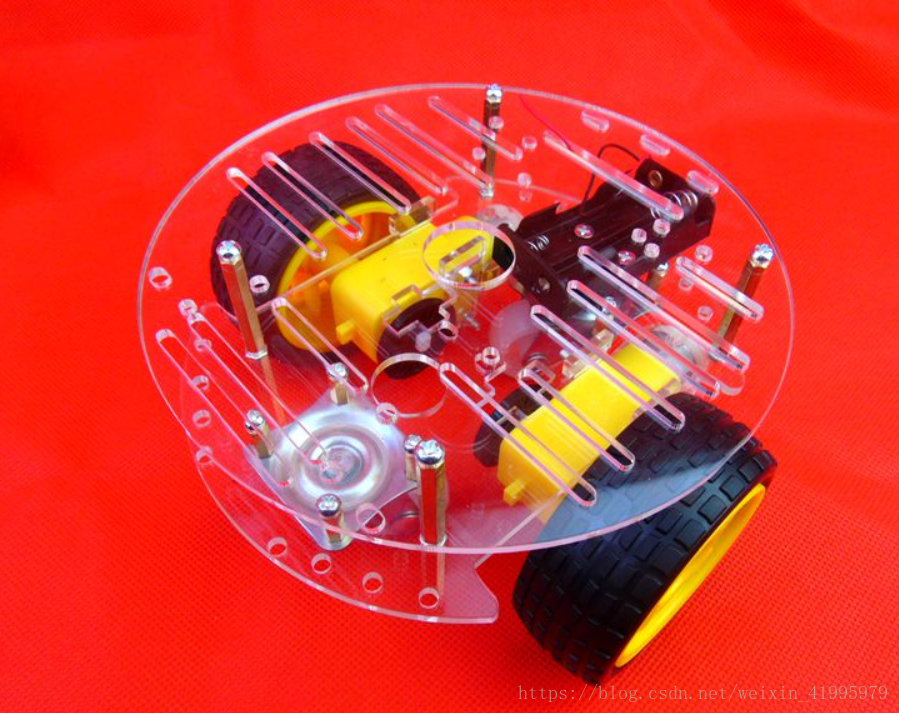
在輪式移動平臺中,兩輪差分驅動恐怕是最簡單的了。它包括兩個獨立控制的驅動輪,一般還會帶有1~2個從動的萬向輪。這種底盤驅動方式很簡單,兩個輪子進行差速控制就能夠使小車直走、後退、轉向。就像下圖這種,就是一臺十分簡陋的兩輪差分驅動底盤。複雜的比如再下面的EAI的Dashgo,這個小車底盤可以實現的已經不單單是無腦的移動了,它搭載了超聲波,鐳射雷達等感測器,已經可以用來進行ROS的學習,實現自主建圖,和自主避障等等功能。

0.1 三輪差分驅動
這部分請看我另一篇博文,裡面有對這類移動平臺的簡單介紹和運動學講解
淺談三輪全向移動平臺
0.2 四輪差分驅動
前面介紹了三輪的全向移動平臺,現在來看一下四輪的結構,
- 0.2.0 四輪雙驅
小時候經常會玩遙控車,那會還見不到差速控制的遙控車(暴露年齡。。。),小朋友們玩的遙控車都是後輪負責動力,前輪控制方向的結構,這便是所謂的四輪雙驅。大部分汽車都是採用這種十分傳統的結構。
- 0.2.1 四輪四驅
- 0.2.1.0 普通四驅
普通的四驅移動平臺,一般採用前後四輪的結構,每個輪子都可以獨立控制,驅動方式跟二輪差分驅動類似,同樣可以使用差速控制實現移動平臺的前進、後退、轉彎。
- 0.2.1.1 麥克納姆輪四驅
-

麥克納姆輪是瑞典麥克納姆公司的專利。這種全方位移動方式是基於一個有許多位於機輪周邊的輪軸的中 心輪的原理上,這些成角度的周邊輪軸把一部分的機輪轉向力轉化到一個機輪法向力上面。 依靠各自機輪的方向和速度,這些力的最終合成在任何要求的方向上產生一個合力向量從而保證了這個平 臺在最終的合力向量的方向上能自由地移動,而不改變機輪自身的方向。在它的輪緣上斜向分佈著許多小 滾子,故輪子可以橫向滑移。小滾子的母線很特殊,當輪子繞著固定的輪心軸轉動時,各個小滾子的包絡 線為圓柱面,所以該輪能夠連續地向前滾動。麥克納姆輪結構緊湊,運動靈活,是很成功的一種全方位 輪。有4個這種新型輪子進行組合,可以更靈活方便的實現全方位移動功能。 (資料來自百度百科)