
Android Camera fw學習(五)-takepicutre(STILL_TAKEPICTURE)流程分析
備註:博文仍然是分析Android5.1的程式碼所寫的學習筆記。
前面已經瞭解過API1大概過程,這裡直奔主題。與TakePicture息息相關的主要有4個執行緒CaptureSequencer,JpegProcessor,Camera3Device::RequestThread,FrameProcessorBase如下面的程式碼可以發現,在Camera2client物件初始化後,已經有3個執行緒已經run起來了,還有有一個RequestThread執行緒會在Camera3Device初始化時建立的。他們工作非常密切,如下大概畫了一個他們的工作機制,4個執行緒都是通過Conditon條件變數來同步的。

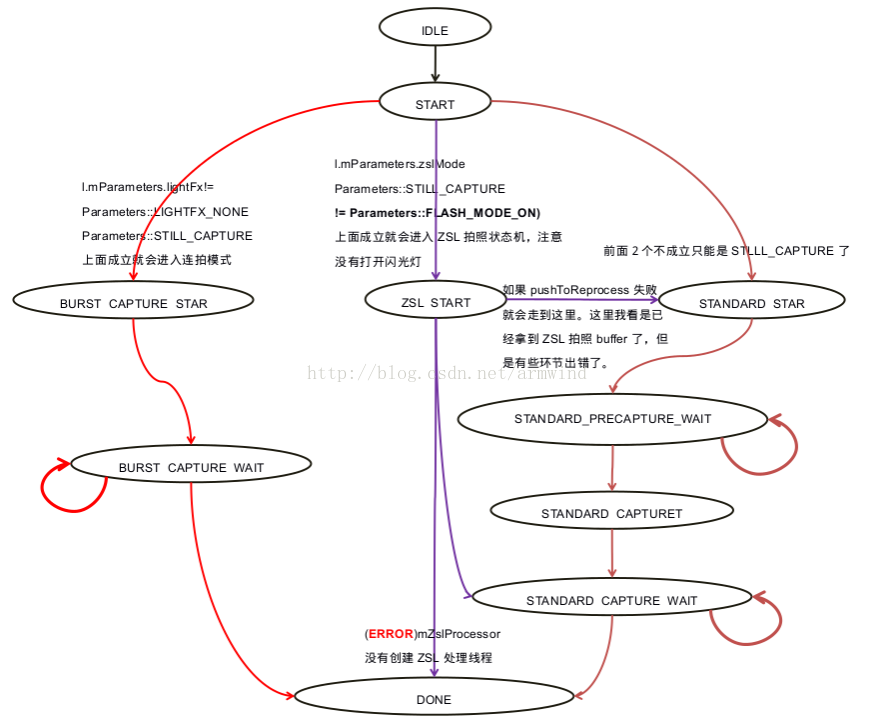
針對該圖有下面幾點注意的( 這裡拍照狀態機只針對是STILL_TAKEPICTURE)
- 1.所有事件驅動源都是在HAL3回幀動作啟用的。當hal3回幀後,會啟用mResultSignal以及在onFrameAvailable啟用mCaptureAvailableSignal條件。如果沒有回幀,所以拍照執行緒都在阻塞等待狀態。
- 2.STLL_TakePicture狀態機在standardStart狀態時,會註冊一個幀監聽物件給FrameProcessor執行緒,如圖所示。
- 3.在準備抓取拍照幀時,首先要判斷AE是否收斂,如果沒有收斂,要等待AE收斂才能進行圖片捕獲狀態。
- 4.當進行圖片捕獲動作後,要阻塞等待拍照資料回傳上來,這就是我們開始子第一條中強調的。如果等待超時會迴圈等待下去(100ms為一單位,等待3.5s應用就會報錯)。
1、拍照TakePicture準備工作
1).建立拍照有關的各個執行緒
status_t Camera2Client::initialize(camera_module_t *module)
{
//-----此處省略N行
mFrameProcessor = new FrameProcessor(mDevice, this);
threadName = String8::format("C2-%d-FrameProc" 上面可以看到我們在建立CaptureSequencer物件時,傳入了當前的Camera2client物件。這裡是由於後面狀態機中的方法中,都需要使用Camera2Client物件來獲取一些引數,以及一些其它操作,這裡就先不深入分析了,等到分析狀態機方法時,在來好好分析吧。
建立JpegProcessor物件時,傳入的有當前Camera2Client物件和剛才我們建立的CaptureSequencer物件,這裡就有必要看一下它的構造函數了。
JpegProcessor::JpegProcessor(
sp<Camera2Client> client,
wp<CaptureSequencer> sequencer):
Thread(false),
mDevice(client->getCameraDevice()),
mSequencer(sequencer),
mId(client->getCameraId()),
mCaptureAvailable(false),
mCaptureStreamId(NO_STREAM) {
}上面可以看到傳入的CaptureSequencer直接儲存下來了,但是Camera2Client物件用於獲取Camera3Device物件和當前CameraId.
2)、建立jpeg_Stream
下面是建立和更新jpeg流的方法,我們知道在前面建立預覽流的時候,系統已經建立了一組預設的jpeg流了,當時那個流的size是預設情況下的size。當我們在應用層選擇不同picture-size時,這裡在拍照時就會刪除之前的流物件,重新建立一個jpeg流物件。
status_t JpegProcessor::updateStream(const Parameters ¶ms) {
ATRACE_CALL();
ALOGV("%s", __FUNCTION__);
status_t res;
Mutex::Autolock l(mInputMutex);
sp<CameraDeviceBase> device = mDevice.promote();
// Find out buffer size for JPEG
ssize_t maxJpegSize = device->getJpegBufferSize(params.pictureWidth, params.pictureHeight);
if (mCaptureConsumer == 0) {
// Create CPU buffer queue endpoint
sp<IGraphicBufferProducer> producer;
sp<IGraphicBufferConsumer> consumer;
BufferQueue::createBufferQueue(&producer, &consumer);
//下面注意buffer數量是1
mCaptureConsumer = new CpuConsumer(consumer, 1);
mCaptureConsumer->setFrameAvailableListener(this);
mCaptureConsumer->setName(String8("Camera2Client::CaptureConsumer"));
mCaptureWindow = new Surface(producer);
}
// Since ashmem heaps are rounded up to page size, don't reallocate if
// the capture heap isn't exactly the same size as the required JPEG buffer
const size_t HEAP_SLACK_FACTOR = 2;
if (mCaptureHeap == 0 ||
(mCaptureHeap->getSize() < static_cast<size_t>(maxJpegSize)) ||
(mCaptureHeap->getSize() >
static_cast<size_t>(maxJpegSize) * HEAP_SLACK_FACTOR) ) {
// Create memory for API consumption
mCaptureHeap.clear();
mCaptureHeap =
new MemoryHeapBase(maxJpegSize, 0, "Camera2Client::CaptureHeap");
}
ALOGV("%s: Camera %d: JPEG capture heap now %d bytes; requested %d bytes",
__FUNCTION__, mId, mCaptureHeap->getSize(), maxJpegSize);
if (mCaptureStreamId != NO_STREAM) {
// Check if stream parameters have to change
uint32_t currentWidth, currentHeight;
res = device->getStreamInfo(mCaptureStreamId,
¤tWidth, ¤tHeight, 0);
if (res != OK) {
ALOGE("%s: Camera %d: Error querying capture output stream info: "
"%s (%d)", __FUNCTION__,
mId, strerror(-res), res);
return res;
}//如果流的size變化了,則需要刪除之前的jpeg stream,建立新的steam
//這經常發生在我們在app選擇了不同的picture-size。
if (currentWidth != (uint32_t)params.pictureWidth ||
currentHeight != (uint32_t)params.pictureHeight) {
ALOGV("%s: Camera %d: Deleting stream %d since the buffer dimensions changed",
__FUNCTION__, mId, mCaptureStreamId);
res = device->deleteStream(mCaptureStreamId);
//省去錯誤檢查機制
mCaptureStreamId = NO_STREAM;
}
}
//這發生在第一建立jpeg steram,拍照請求。
if (mCaptureStreamId == NO_STREAM) {
// Create stream for HAL production
res = device->createStream(mCaptureWindow,
params.pictureWidth, params.pictureHeight,
HAL_PIXEL_FORMAT_BLOB, &mCaptureStreamId);
if (res != OK) {
return res;
}
}
return OK;
}上面值得注意的是當是第一次建立jpegStream時,會建立一個BufferQueue物件,注意mCaptureConsumer = new CpuConsumer(consumer, 1);這裡設定buffer數量是1,STLL_CAPTURE只有一張圖嘛。
二、拍照之-STILL_CAPTURE
APP點選拍照按鍵後,ICamera代理物件就會調到這裡了。這裡可以看到它最後啟動拍照狀態機。
status_t Camera2Client::takePicture(int msgType) {
ATRACE_CALL();
Mutex::Autolock icl(mBinderSerializationLock);
status_t res;
if ( (res = checkPid(__FUNCTION__) ) != OK) return res;
//------------------------------------------------------
//這裡幹了一些事情,會重新check picture-size是否和當前的
//的jpeg流是一樣的size,如果不一樣的話,會刪除之前jpeg流物件
//重新根據新的picture-size建立jpeg流物件。建立好後就啟動
//拍照狀態機了。
res = mCaptureSequencer->startCapture(msgType);
return res;
}上面startCapture方法調動之後,就會發送一個訊號啟用CaptureSequencer執行緒。
- 1.一開始CaptureSequencer執行緒執行之後,預設是在IDEL狀態,這個時候執行緒會在IDEL狀態機方法中等待。
- 2.當呼叫了startCapture方法後,會啟用CaptureSequencer執行緒。將狀態機切換到START狀態。狀態機處理方法就是下面這個方法。
1.拍照狀態機-manageStart()
CaptureSequencer::CaptureState CaptureSequencer::manageStart(
sp<Camera2Client> &client) {
ALOGV("%s", __FUNCTION__);
status_t res;
ATRACE_CALL();
SharedParameters::Lock l(client->getParameters());
CaptureState nextState = DONE;
//下面這個方法就是用來建立拍照的metadata的介面。
//如果狀態機就會從hal中獲取一個型別為CAMERA2_TEMPLATE_STILL_CAPTURE的metadata物件,並根據引數更新metadata相應的縮圖、flash狀態、拍照質量等資訊。它的主要作用就是確保狀態機有一個可以使用的Medatadata資料包。
res = updateCaptureRequest(l.mParameters, client);
//連拍模式狀態機
if(l.mParameters.lightFx != Parameters::LIGHTFX_NONE &&
l.mParameters.state == Parameters::STILL_CAPTURE) {
nextState = BURST_CAPTURE_START;
}
else if (l.mParameters.zslMode &&
l.mParameters.state == Parameters::STILL_CAPTURE &&
l.mParameters.flashMode != Parameters::FLASH_MODE_ON) {//ZSL拍照模式,注意ZSL是不開閃光燈的。
nextState = ZSL_START;
} else { //正常模式-靜態拍照
nextState = STANDARD_START;
}
mShutterNotified = false;
return nextState;
}上面我們先分析STANDARD_START的狀態機情況。
2.拍照狀態機-manageStandardStart()
CaptureSequencer::CaptureState CaptureSequencer::manageStandardStart(
sp<Camera2Client> &client) {
ATRACE_CALL();
bool isAeConverged = false;
// Get the onFrameAvailable callback when the requestID == mCaptureId
// We don't want to get partial results for normal capture, as we need
// Get ANDROID_SENSOR_TIMESTAMP from the capture result, but partial
// result doesn't have to have this metadata available.
// TODO: Update to use the HALv3 shutter notification for remove the
// need for this listener and make it faster. see bug 12530628.
client->registerFrameListener(mCaptureId, mCaptureId + 1,
this,
/*sendPartials*/false);
{
Mutex::Autolock l(mInputMutex);
isAeConverged = (mAEState == ANDROID_CONTROL_AE_STATE_CONVERGED);
}
{
SharedParameters::Lock l(client->getParameters());
// Skip AE precapture when it is already converged and not in force flash mode.
if (l.mParameters.flashMode != Parameters::FLASH_MODE_ON && isAeConverged) {
return STANDARD_CAPTURE;
}
mTriggerId = l.mParameters.precaptureTriggerCounter++;
}
client->getCameraDevice()->triggerPrecaptureMetering(mTriggerId);
mAeInPrecapture = false;
mTimeoutCount = kMaxTimeoutsForPrecaptureStart;
return STANDARD_PRECAPTURE_WAIT;
}上面做了下面幾件事情。
- 1. 註冊拍照圖片可用監聽物件
- 2.判斷當前AE狀態是否收斂,如果收斂了,拍照狀態機為STANDARD_CAPTURE。如果AE已經收斂那麼拍照狀態機就是STANDARD_PRECAPTURE_WAIT,就會下發AE收斂訊息,等待HAL AE收斂完成。
1).程式碼片段1-註冊拍照幀可用監聽物件
status_t Camera2Client::registerFrameListener(int32_t minId, int32_t maxId,
wp<camera2::FrameProcessor::FilteredListener> listener, bool sendPartials) {
return mFrameProcessor->registerListener(minId, maxId, listener, sendPartials);
}
//----------------------------------------------------------
struct FilteredListener: virtual public RefBase {
virtual void onResultAvailable(const CaptureResult &result) = 0;
};上面我們根據引數可以發現監聽物件是FilteredListener,必須實現onResultAvailable()方法,這裡CaptureSequencer類已經實現了這個方法,如下所示。
void CaptureSequencer::onResultAvailable(const CaptureResult &result) {
ATRACE_CALL();
ALOGV("%s: New result available.", __FUNCTION__);
Mutex::Autolock l(mInputMutex);
mNewFrameId = result.mResultExtras.requestId;
mNewFrame = result.mMetadata;
if (!mNewFrameReceived) {
mNewFrameReceived = true;
mNewFrameSignal.signal();
}
}上面onResultAvailable()方法中將mNewFrameReceived標誌設定為true,併發送條件mNewFrameSignal,啟用正在等待這個條件的方法。
//這裡由於FrameProcessor繼承了FrameProcessorBase類,所以我們直接
//在FrameProcessor中查不到registerListener方法。
status_t FrameProcessorBase::registerListener(int32_t minId,
int32_t maxId, wp<FilteredListener> listener, bool sendPartials) {
Mutex::Autolock l(mInputMutex);
//這裡會檢查監聽物件是否之前已經註冊過,如果已經註冊過就不會
//在註冊了。
List<RangeListener>::iterator item = mRangeListeners.begin();
while (item != mRangeListeners.end()) {
if (item->minId == minId && item->maxId == maxId && item->listener == listener) {
return OK;
}
item++;
}
//將當前監聽物件存放到佇列中。
RangeListener rListener = { minId, maxId, listener, sendPartials };
mRangeListeners.push_back(rListener);
return OK;
}上面是註冊拍照幀監聽物件實現方法,注意這裡是將拍照狀態儲存到了mRangeListeners列表中。這裡為什麼會註冊多個拍照幀可用監聽物件呢?
3.拍照狀態機-manageStandardCapture()
CaptureSequencer::CaptureState CaptureSequencer::manageStandardCapture(
sp<Camera2Client> &client) {
status_t res;
ATRACE_CALL();
SharedParameters::Lock l(client->getParameters());
Vector<int32_t> outputStreams;
uint8_t captureIntent = static_cast<uint8_t>(ANDROID_CONTROL_CAPTURE_INTENT_STILL_CAPTURE);
/**
* Set up output streams in the request
* - preview
* - capture/jpeg
* - callback (if preview callbacks enabled)
* - recording (if recording enabled)
*/
//下面預設會將preview和capture流id儲存到臨時陣列outputStreams中。
outputStreams.push(client->getPreviewStreamId());
outputStreams.push(client->getCaptureStreamId());
if (l.mParameters.previewCallbackFlags &
CAMERA_FRAME_CALLBACK_FLAG_ENABLE_MASK) {
outputStreams.push(client->getCallbackStreamId());
}
//這裡如果是video_snapshot模式,則會修改捕獲意圖為ANDROID_CONTROL_CAPTURE_INTENT_VIDEO_SNAPSHOT
if (l.mParameters.state == Parameters::VIDEO_SNAPSHOT) {
outputStreams.push(client->getRecordingStreamId());
captureIntent = static_cast<uint8_t>(ANDROID_CONTROL_CAPTURE_INTENT_VIDEO_SNAPSHOT);
}
//將各種需要的流ID,儲存到metadata中,為了在Camera3Device中查詢到對應流物件。
res = mCaptureRequest.update(ANDROID_REQUEST_OUTPUT_STREAMS,
outputStreams);
if (res == OK) {//儲存到請求ID
res = mCaptureRequest.update(ANDROID_REQUEST_ID,
&mCaptureId, 1);
}
if (res == OK) {//儲存捕獲意圖到metadata中。
res = mCaptureRequest.update(ANDROID_CONTROL_CAPTURE_INTENT,
&captureIntent, 1);
}
if (res == OK) {
res = mCaptureRequest.sort();
}
if (res != OK) {//如果出問題,拍照結束,一般不會走到這裡。
ALOGE("%s: Camera %d: Unable to set up still capture request: %s (%d)",
__FUNCTION__, client->getCameraId(), strerror(-res), res);
return DONE;
}
// Create a capture copy since CameraDeviceBase#capture takes ownership
CameraMetadata captureCopy = mCaptureRequest;
//此處省略一些metadata檢查程式碼,無礙於分析。
/**
* Clear the streaming request for still-capture pictures
* (as opposed to i.e. video snapshots)
*/
if (l.mParameters.state == Parameters::STILL_CAPTURE) {
// API definition of takePicture() - stop preview before taking pic
res = client->stopStream();//如果是靜態拍照,注意是非ZSL模式,則會停止preview預覽流。
if (res != OK) {
ALOGE("%s: Camera %d: Unable to stop preview for still capture: "
"%s (%d)",
__FUNCTION__, client->getCameraId(), strerror(-res), res);
return DONE;
}
}
// TODO: Capture should be atomic with setStreamingRequest here
//注意這裡會啟動捕獲了,使用拷貝的metadata資料,而且上面的google註釋也說了,這是一個原子操作。
//注意這裡會在Camera3Device中根據metadata中的資料,建立請求,並將請求傳送給hal.
res = client->getCameraDevice()->capture(captureCopy);
if (res != OK) {
ALOGE("%s: Camera %d: Unable to submit still image capture request: "
"%s (%d)",
__FUNCTION__, client->getCameraId(), strerror(-res), res);
return DONE;
}
mTimeoutCount = kMaxTimeoutsForCaptureEnd;
return STANDARD_CAPTURE_WAIT;
}4.拍照狀態機-manageStandardCaptureWait()
CaptureSequencer::CaptureState CaptureSequencer::manageStandardCaptureWait(
sp<Camera2Client> &client) {
status_t res;
ATRACE_CALL();
Mutex::Autolock l(mInputMutex);
// Wait for new metadata result (mNewFrame)
// 這裡mNewFrameReceived在拍照幀沒準備好之前為false,一旦拍照幀準備好了,FrameProcessor會回撥之前註冊的onResultAvailable()方法,在該方法中將mNewFrameReceived設定為true,並激活mNewFrameSignal條件,下面的等待操作就會繼續往下走了。
while (!mNewFrameReceived) {
//這裡會等待100ms
res = mNewFrameSignal.waitRelative(mInputMutex, kWaitDuration);
if (res == TIMED_OUT) {
mTimeoutCount--;
break;
}
}
// Approximation of the shutter being closed
// - TODO: use the hal3 exposure callback in Camera3Device instead
//下面是通知shutter事件,即播放拍照音,並將CAMERA_MSG_SHUTTER,CAMERA_MSG_RAW_IMAGE_NOTIFY回傳給上層。
if (mNewFrameReceived && !mShutterNotified) {
SharedParameters::Lock l(client->getParameters());
/* warning: this also locks a SharedCameraCallbacks */
shutterNotifyLocked(l.mParameters, client, mMsgType);
mShutterNotified = true;//已經通知shutter事件了。
}
// Wait until jpeg was captured by JpegProcessor
//mNewCaptureSignal該條件是在jpeg 圖片資料enqueue到bufferqueue時啟用的。這裡做一下小結
//這裡會用到兩個contiion物件mNewFrameSignal和mNewCaptureSignal,其中當hal回傳jpeg幀時,會先
//return buffer即先啟用mNewCaptureSignal,才會啟用mNewFrameSignal。所以到了下面條件,直接
//為真。
while (mNewFrameReceived && !mNewCaptureReceived) {
res = mNewCaptureSignal.waitRelative(mInputMutex, kWaitDuration);
if (res == TIMED_OUT) {
mTimeoutCount--;
break;
}
}
if (mTimeoutCount <= 0) {
ALOGW("Timed out waiting for capture to complete");
return DONE;
}
//如果mNewFrameReceived && mNewCaptureReceived為真,說明真的收到jepg幀了。
if (mNewFrameReceived && mNewCaptureReceived) {
//這裡主要做了2件事情
//1.檢查捕獲ID是否一樣,否則就直接報錯。
//2.檢查事件戳是否正確,這個一般是不會錯的。
client->removeFrameListener(mCaptureId, mCaptureId + 1, this);
mNewFrameReceived = false;
mNewCaptureReceived = false;
return DONE;//返回狀態機DONE.
}
//如果還沒準備好,則會繼續等待下去,一般發生在等待100ms超時。
return STANDARD_CAPTURE_WAIT;
}
5.拍照狀態機-manageDone()
CaptureSequencer::CaptureState CaptureSequencer::manageDone(sp<Camera2Client> &client) {
status_t res = OK;
ATRACE_CALL();
mCaptureId++;
if (mCaptureId >= Camera2Client::kCaptureRequestIdEnd) {
mCaptureId = Camera2Client::kCaptureRequestIdStart;
}
{
Mutex::Autolock l(mInputMutex);
mBusy = false;
}
int takePictureCounter = 0;
{
SharedParameters::Lock l(client->getParameters());
switch (l.mParameters.state) {
case Parameters::DISCONNECTED:
ALOGW("%s: Camera %d: Discarding image data during shutdown ",
__FUNCTION__, client->getCameraId());
res = INVALID_OPERATION;
break;
case Parameters::STILL_CAPTURE:
res = client->getCameraDevice()->waitUntilDrained();
if (res != OK) {
ALOGE("%s: Camera %d: Can't idle after still capture: "
"%s (%d)", __FUNCTION__, client->getCameraId(),
strerror(-res), res);
}
l.mParameters.state = Parameters::STOPPED;
break;
case Parameters::VIDEO_SNAPSHOT:
l.mParameters.state = Parameters::RECORD;
break;
default:
ALOGE("%s: Camera %d: Still image produced unexpectedly "
"in state %s!",
__FUNCTION__, client->getCameraId(),
Parameters::getStateName(l.mParameters.state));
res = INVALID_OPERATION;
}
takePictureCounter = l.mParameters.takePictureCounter;
}
sp<ZslProcessorInterface> processor = mZslProcessor.promote();
if (processor != 0) {
ALOGV("%s: Memory optimization, clearing ZSL queue",
__FUNCTION__);
processor->clearZslQueue();
}
/**
* Fire the jpegCallback in Camera#takePicture(..., jpegCallback)
*/
if (mCaptureBuffer != 0 && res == OK) {
ATRACE_ASYNC_END(Camera2Client::kTakepictureLabel, takePictureCounter);
Camera2Client::SharedCameraCallbacks::Lock
l(client->mSharedCameraCallbacks);
ALOGV("%s: Sending still image to client", __FUNCTION__);
if (l.mRemoteCallback != 0) {//將圖片資料回傳到上層,上層會去做一下拷貝。
l.mRemoteCallback->dataCallback(CAMERA_MSG_COMPRESSED_IMAGE,
mCaptureBuffer, NULL);
} else {
ALOGV("%s: No client!", __FUNCTION__);
}
}
mCaptureBuffer.clear();
return IDLE;//拍照狀態機返回到IDLE.
}6.拍照狀態機列表:
其中可以看到有ZSL的拍照狀態機處理函式,具體ZSL的狀態機放到下篇部落格分析吧。
const CaptureSequencer::StateManager
CaptureSequencer::kStateManagers[CaptureSequencer::NUM_CAPTURE_STATES-1] = {
&CaptureSequencer::manageIdle,
&CaptureSequencer::manageStart,
&CaptureSequencer::manageZslStart,
&CaptureSequencer::manageZslWaiting,
&CaptureSequencer::manageZslReprocessing,
&CaptureSequencer::manageStandardStart,
&CaptureSequencer::manageStandardPrecaptureWait,
&CaptureSequencer::manageStandardCapture,
&CaptureSequencer::manageStandardCaptureWait,
&CaptureSequencer::manageBurstCaptureStart,
&CaptureSequencer::manageBurstCaptureWait,
&CaptureSequencer::manageDone,
};拍照狀態機如下:
三、幀可用監聽物件何時被呼叫
1.結果可用通知onResultAvailable何時呼叫
這裡倒著分析
void CaptureSequencer::onResultAvailable(const CaptureResult &result) {
ATRACE_CALL();
ALOGV("%s: New result available.", __FUNCTION__);
Mutex::Autolock l(mInputMutex);
mNewFrameId = result.mResultExtras.requestId;
mNewFrame = result.mMetadata;
if (!mNewFrameReceived) {
mNewFrameReceived = true;
mNewFrameSignal.signal();
}
}下面可以看到processListeners會去找到幀監聽物件,然後會呼叫相應的onResultAvailable回撥。
status_t FrameProcessorBase::processListeners(const CaptureResult &result,
const sp<CameraDeviceBase> &device) {
//------------
entry = result.mMetadata.find(ANDROID_REQUEST_ID);
int32_t requestId = entry.data.i32[0];
//這裡會根據hal返回來的資料,查詢到requestId,並根據requestId查詢到當前幀的監聽物件。
//找到後,就呼叫了onResultAvailable()方法,如下。
List<sp<FilteredListener> >::iterator item = listeners.begin();
for (; item != listeners.end(); item++) {
(*item)->onResultAvailable(result);
} processSingleFrame()方法中直接呼叫了processListeners()方法。
bool FrameProcessorBase::processSingleFrame(CaptureResult &result,
const sp<CameraDeviceBase> &device) {
ALOGV("%s: Camera %d: Process single frame (is empty? %d)",
__FUNCTION__, device->getId(), result.mMetadata.isEmpty());
return processListeners(result, device) == OK;
}
//而
void FrameProcessorBase::processNewFrames(const sp<CameraDeviceBase> &device) {
status_t res;
ATRACE_CALL();
CaptureResult result;
//從Device物件中獲取到result物件,即hal返回來的幀資料。
while ( (res = device->getNextResult(&result)) == OK) {
// TODO: instead of getting frame number from metadata, we should read
// this from result.mResultExtras when CameraDeviceBase interface is fixed.
camera_metadata_entry_t entry;
entry = result.mMetadata.find(ANDROID_REQUEST_FRAME_COUNT);
//此處省略一些錯誤檢查程式碼,不影響分析程式碼。
if (!processSingleFrame(result, device)) {
break;
}
}
return;
}上面2段程式碼只是體現出呼叫流程。
bool FrameProcessorBase::threadLoop() {
status_t res;
sp<CameraDeviceBase> device;
{
device = mDevice.promote();
if (device == 0) return false;
}
res = device->waitForNextFrame(kWaitDuration);
if (res == OK) {
processNewFrames(device);
} else if (res != TIMED_OUT) {
ALOGE("FrameProcessorBase: Error waiting for new "
"frames: %s (%d)", strerror(-res), res);
}
return true;
}上面程式碼可以看到直接呼叫了Camera3Device的waitForNextFrame()方法,用來等待幀結果。
status_t Camera3Device::waitForNextFrame(nsecs_t timeout) {
status_t res;
Mutex::Autolock l(mOutputLock);
while (mResultQueue.empty()) {
res = mResultSignal.waitRelative(mOutputLock, timeout);
if (res == TIMED_OUT) {
return res;
} else if (res != OK) {
ALOGW("%s: Camera %d: No frame in %" PRId64 " ns: %s (%d)",
__FUNCTION__, mId, timeout, strerror(-res), res);
return res;
}
}
return OK;
}上面可以看到這裡在等待mResultSignal條件,那它什麼時候會會為真呢。這兩個函式都會在hal callback回來資料時調動。
bool Camera3Device::processPartial3AResult(
uint32_t frameNumber,
const CameraMetadata& partial, const CaptureResultExtras& resultExtras) {
//-------------此處省略N行程式碼-------------
// We only send the aggregated partial when all 3A related metadata are available
// For both API1 and API2.
// TODO: we probably should pass through all partials to API2 unconditionally.
mResultSignal.signal();
}
void Camera3Device::sendCaptureResult(CameraMetadata &pendingMetadata,
CaptureResultExtras &resultExtras,
CameraMetadata &collectedPartialResult,
uint32_t frameNumber) {
//-------------此處省略N行程式碼-------------
mResultSignal.signal();
}由此可以看出,當hal3有幀過來後,就會呼叫onResultAvailable()回撥。
2.捕獲幀可用通知onCaptureAvailable何時呼叫
void CaptureSequencer::onCaptureAvailable(nsecs_t timestamp,
sp<MemoryBase> captureBuffer) {
ATRACE_CALL();
ALOGV("%s", __FUNCTION__);
Mutex::Autolock l(mInputMutex);
mCaptureTimestamp = timestamp;
mCaptureBuffer = captureBuffer;
if (!mNewCaptureReceived) {
mNewCaptureReceived = true;
mNewCaptureSignal.signal();
}
}首先來看看捕獲可用通知方法中幹了什麼,做了4件事情,也是我們上面看到的。
- 1.獲取當前幀事件戳
- 2.儲存當前幀buffer.
- 3.設定mNewCaptureReceived標誌位為true.
- 4.啟用mNewCaptureSignal條件,拍照狀態機會一直會等待這個條件。
該方法是在JpegProcessor處理執行緒中被呼叫的。
status_t JpegProcessor::processNewCapture() {
ATRACE_CALL();
status_t res;
sp<Camera2Heap> captureHeap;
sp<MemoryBase> captureBuffer;
CpuConsumer::LockedBuffer imgBuffer;
//由於之前我們建立bufferQueue時,我們只允許有一個buffer,所以
//下面ACQUIRE buffer操作,獲取到的肯定是jpeg圖片buffer.
res = mCaptureConsumer->lockNextBuffer(&imgBuffer);//
//此處省略部分功能程式碼,不過不影響分析程式碼
//下面mCaptureHeap就是在更新jpeg流的時候建立的一個匿名共享記憶體,
// TODO: Optimize this to avoid memcopy
captureBuffer = new MemoryBase(mCaptureHeap, 0, jpegSize);
void* captureMemory = mCaptureHeap->getBase();
// 下面將圖片資料拷貝到匿名共享記憶體中,不知道為什麼還要有這一步,
// ION buffer也可以直接用的。
memcpy(captureMemory, imgBuffer.data, jpegSize);
//release buffer操作,將buffer歸還給bufferQueue.
mCaptureConsumer->unlockBuffer(imgBuffer);
sp<CaptureSequencer> sequencer = mSequencer.promote();
if (sequencer != 0) {
//下面看到了吧,onCaptureAvailable()方法就是在這裡呼叫的,同時將buffer的
//時間戳以及buffer傳入了進去。
sequencer->onCaptureAvailable(imgBuffer.timestamp, captureBuffer);
}
return OK;
}詳細的註釋都在程式碼中,這裡只是將jpeg buffer拷貝了一下,然後子傳給上層。下面看看processNewCapture()
方法是在哪裡呼叫的。下面可以看到是在JpegProcessor執行緒處理函式中迴圈處理的。
bool JpegProcessor::threadLoop() {
status_t res;
{
Mutex::Autolock l(mInputMutex);
while (!mCaptureAvailable) {
//這裡會等待mCaptureAvailableSignal條件100ms,
res = mCaptureAvailableSignal.waitRelative(mInputMutex,
kWaitDuration);
if (res == TIMED_OUT) return true;
}
mCaptureAvailable = false;
}
do {//是在這裡迴圈處理的
res = processNewCapture();
} while (res == OK);
return true;
} 上面JpegProcessor處理執行緒一直在等待mCaptureAvailableSignal條件可用,但是它在哪裡被啟用的呢。
由於JpegProcessor執行緒在更新jpeg流資訊時,建立了一個bufferQueue,這樣的話當buffer進行ENQUENU操作時
都會呼叫onFrameAvailable()方法。進行ENQUEUE操作時,說明幀資料已經歸還到BufferQueue中了。消費者可以去拿了。
void JpegProcessor::onFrameAvailable(const BufferItem& /*item*/) {
Mutex::Autolock l(mInputMutex);
if (!mCaptureAvailable) {
mCaptureAvailable = true;
mCaptureAvailableSignal.signal();//這裡看到激活了mCaptureAvailableSignal條件。
}
}小總結:
- 1.當hal將jpeg資料返回到framework時,就會呼叫onCaptureAvailable(),設定一些狀態以及啟用一些條件(Condition)