
【機器人學】機器人開源專案KDL原始碼學習:(4)機械臂逆動力學的牛頓尤拉演算法
機械臂的逆動力學問題可以認為是:已知機械臂各個連桿的關節的運動(關節位移、關節速度和關節加速度),求產生這個加速度響應所需要的力/力矩。KDL提供了兩個求解逆動力學的求解器,其中一個是牛頓尤拉法,這個方法是最簡單和高效的方法。
牛頓尤拉法演算法可以分為三個步驟: step1:計算每個連桿質心的速度和加速度; step2:計算產生這些加速度所需要的合力; step3:計算其它連桿通過關節對每個連桿施加的力。
KDL中的牛頓尤拉法的程式碼是基於文獻《Rigid Body Dynamics Algorithms》寫的,這本書中使用了spatial vector的概念,spatial vector將3維的剛體的線性運動(力)和3維的旋轉運動(力)組合到一起形成6維的,這樣處理會使程式碼便於閱讀(關於Spatial Vector可以看另外一篇部落格-
下表為KDL中逆動力學的虛擬碼(這個表也是從《Rigid Body Dynamics Algorithms》截的圖,KDL的程式碼和這些公式不是完全對應的,要完全理解KDL的思想需要把這本書過一遍)。
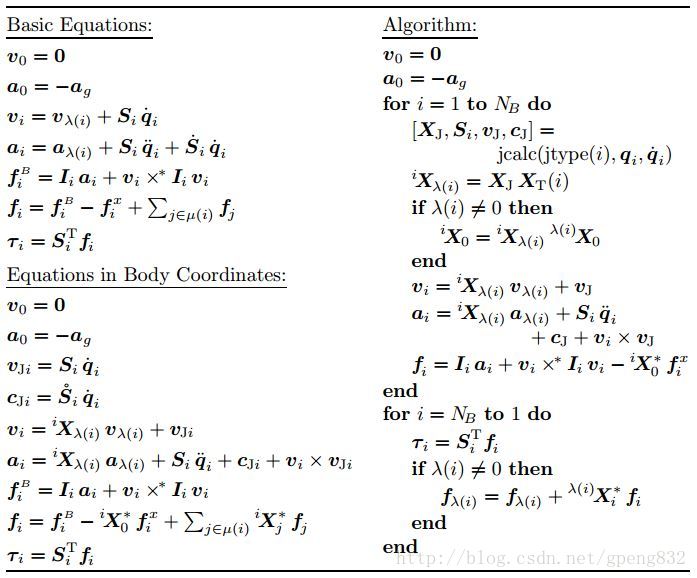
圖1 牛頓尤拉法的虛擬碼
Basic Equations部分表示各個連桿的速度
Equations in Body Coordinates
Algorithm部分的虛擬碼對應就是KDL中的逆運動學程式碼(src/chainidsolver_recursive_newton_euler.cpp),如下所示:
int ChainIdSolver_RNE::CartToJnt(const JntArray &q, const JntArray &q_dot, const JntArray &q_dotdot, const Wrenches& f_ext,JntArray &torques)
{
if 在閱讀程式碼的時候,大家比較關心的可能是程式碼段與公式的對應關係,由於KDL的程式碼非常簡短(原因是使用了Spatial Vector),所以這裡把關鍵程式碼與文獻中的公式對應起來,便於閱讀程式碼):
X[i]=chain.getSegment(i).pose(q_); 求解轉換矩陣
vj=X[i].M.Inverse(chain.getSegment(i).twist(q_,qdot_)); 求解關節引起的連桿速度
v[i]=X[i].Inverse(v[i-1])+vj; 求解連桿末端的速度(
a[i]=X[i].Inverse(a[i-1])+S[i]*qdotdot_+v[i]*vj; 這行程式碼是求解連桿的加速度,
RigidBodyInertia Ii=chain.getSegment(i).getInertia();
f[i]=Ii*a[i]+v[i]*(Ii*v[i])-f_ext[i]; 獲取機械臂的動力學引數(質量、慣性張量、連桿座標系到連桿質心偏移)、
torques(j--)=dot(S[i],f[i]); 這行程式碼求解關節力或力矩(
參考文獻:
[1] 《Rigid Body Dynamics Algorithms》. Roy Featherstone, 2008