ubuntu18.04配置cartographer
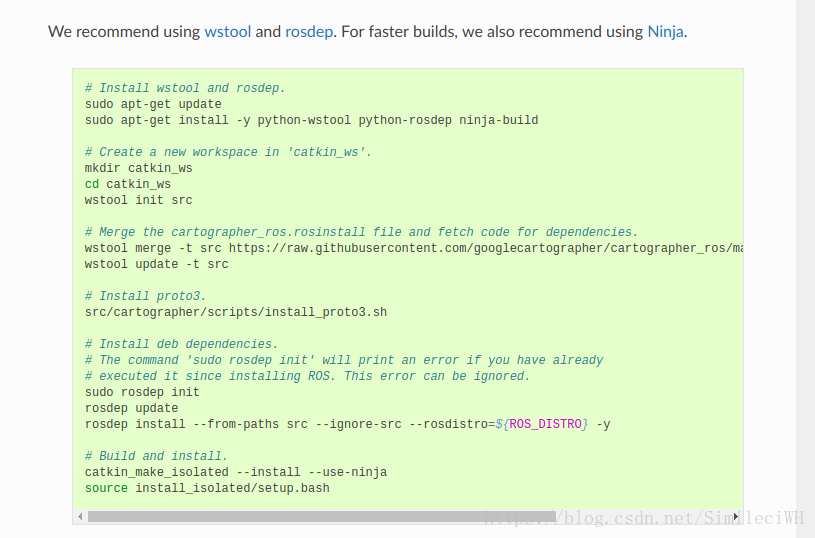
1 安裝cartographer,使用官網提供的方法
這個很方便,前提是你可以訪問google,你要有穩定的vpn賬號。
如果你有,那麼可以檢視官網的這個連結進行安裝,是完全可行的
link:https://google-cartographer-ros.readthedocs.io/en/latest/
然後下載資料測試包,2D的大小為470M,3D的大小為9.1G,耐心下載完成後即可順利測試。
2 無法連結到google就無法使用google推薦的安裝方法。
可以使用一下方法:
2.1 在ros官網搜尋cartographer
link:http://wiki.ros.org/cartographer
進入github下載
2.2 同樣的方法下載cartgrapher_ros和ceres-solver
(以下額外的,不是必要的操作)針對於只想安裝ceres-solver的使用者
2.3 第一步安裝必要的工具和依賴關係:
sudo apt-get install cmake sudo apt-get install libgoogle-glog-dev sudo apt-get install libatlas-base-dev # Eigen3 sudo apt-get install libeigen3-dev #如果想要構建ceres作為一個靜態的庫 sudo apt-get install libsuitesparse-dev #如果你想要構建ceres作為一個共享的庫,就需要新增這個原source sudo add-apt-repository ppa:bzindovic/suitesparse-bugfix-1319687 sudo apt-get update sudo apt-get install libsuitesparse-dev
依賴關係安裝完成後,構建ceres
cd ceres-solver
mkdir ceres-bin
cd ceres-bin
cmake ..
make -j3
make test
sudo make install2.4 如果在編譯時提示缺少Lua,請看如下的安裝方式
1)下載lua包,link:http://www.lua.org/ftp/lua-5.2.3.tar.gz
2)安裝必要的依賴關係:
sudo apt-get install build-essential sudo apt-get install libreadline sudo apt-get install libreadline5-dev
如果沒有找到對應的包,在兩次tab鍵後,選擇最相關的一個包安裝即可。
3)講下載的lua包解壓到你的目錄下,安裝
make linux
sudo make installmake 後面是你安裝的系統平臺引數,有以下可選:
aix ansi bsd freebsd generic linux macosx mingw posix solaris
如果你的系統沒有在上面列舉的裡面,選擇最相近的。比如,ubuntu,Lubuntu,deepin等就選擇linux。以此類推。
4)測試是否安裝成功
在命令列輸入,顯示如下,說明成功,使用ctrl+d退出lua:
$ lua
Lua 5.2.3 Copyright (C) 1994-2013 Lua.org, PUC-Rio
>
3 如果你覺得比較麻煩,可以使用我打包好的cartographer包,在這裡下載,
link:https://download.csdn.net/download/simileciwh/10702337
4 在2或這3節的步驟都準備好後,開始構建cartographer
mkdir -p cartographer/src
cd cartographer/src
#將之前下載的cartographer,cartographer_ros,ceres-slover解壓放在這個位置如下圖所示
然後開始構建編譯
#進入你的cartographer目錄
cd cartographer
# Install proto3.
src/cartographer/scripts/install_proto3.sh
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y
# Build and install.這一步會花費很長的時間,耐心等待
catkin_make_isolated --install --use-ninja
source install_isolated/setup.bash注意所有操作都不要進入之前建立的src資料夾內!!!
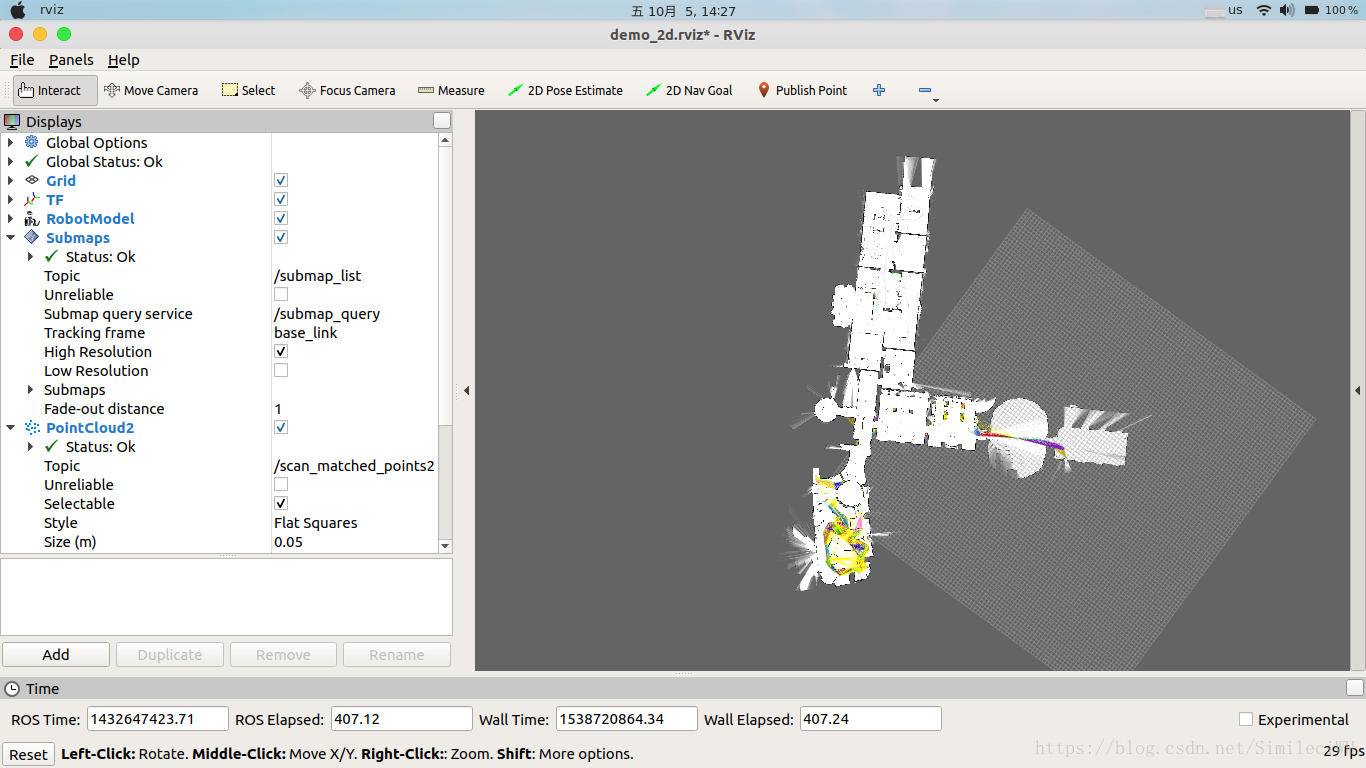
5 在4成功構建後,下載官方的測試資料,測試
# Download the 2D backpack example bag.
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag
# Launch the 2D backpack demo.
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag
# Download the 3D backpack example bag.
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_3d/with_intensities/b3-2016-04-05-14-14-00.bag
# Launch the 3D backpack demo.
roslaunch cartographer_ros demo_backpack_3d.launch bag_filename:=${HOME}/Downloads/b3-2016-04-05-14-14-00.bag2D資料471M,3D資料9.1G比較大,因為上傳資源220M限制,我就不上傳了,百度測試資料網盤有很多。大家可以自己搜查。
2D測試資料的效果如下圖所示: