
論文筆記6:Increasing the Action Gap: New Operators for Reinforcement Learning
參考文獻:New Operators for Reinforcement Learning
同名知乎:uuummmmiiii
這篇文章實在是式子多,整個看懵,網上目前沒啥人看過這篇,論文有兩部分,我掙扎了一下看了第一部分,所以第二部分具體作者創新了什麼,做了什麼相關推導我也不知道,哭泣。
如有錯誤還請指出,本人小白,希望幫助更多的人,一同進步。
論文分為兩部分:前部分:作者介紹新提出的新運算元。
後半部分:為這個運算元可以保持最優性推匯出了充分條件。
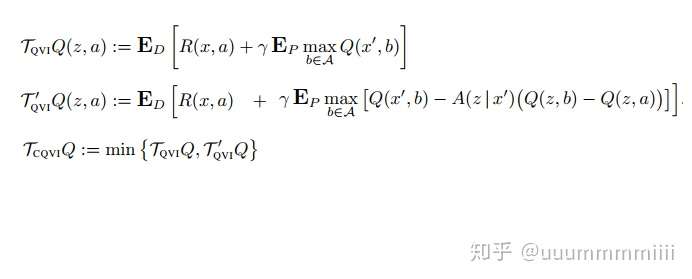
創新點:提出了最優儲存運算元(optimality-preserving),稱為consistent Bellman operator
改進:在Q函式更新公式,加入此運算元。公式如下:
原Q函式更新公式:
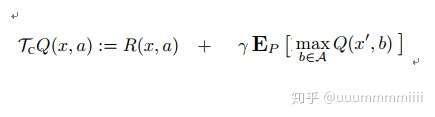
改進原因:Q值發生小擾動會導致錯誤識別最佳動作,原來的Q函式更新方式不穩定(因為Q*的選取是選策略π)
帶來益處:1、可以增加action gap(the value difference between optimal and second best action),緩解近似和估計誤差對選擇動作(貪婪策略)的影響。
2、可以將這個運算元用於進行對連續狀態的離散化。
3、 可以提升在一些需要運作在很好的time scale下的遊戲(個人理解為
是一種需要即時性戰略的遊戲,並非棋盤類和傳統電子遊戲的那種回合制的遊戲:作者舉出三個例子,視訊遊戲、實時市場、機器人遊戲)
Abstract
本文提出了一種在Q函式中的最優保留運算元,我們成為 the consistent Bellman operator,這裡融合了局部策略一致性的概念。我們說明了,這種區域性一致性可以在每個狀態下增加action gap,這樣可以緩和近似和估計誤差對選擇動作(貪婪策略)的影響。最優運算元也可以應用在對連續狀態的離散化和時間相關的問題,並且在論文中進行了驗證,證明這個運算元可以產生優良效能。
為了擴充套件區域性一致性運算元的概念,我們有推匯出了其可以保持最優性的充分條件,引入包含我們這個consistent Bellman operator的運算元群(家族)。作為推論,我們提供了Baird's advantage learning algorithm 的最優性證明和其他可以使action gap增加的運算元。
最終我們在60 Atari 2600 games 中例項驗證了這些新運算元的強大力量。
The consistent Bellman operator
開始利用上面這個吃蛋糕的簡單例子,論證了一大堆複雜式子,就是說明,這個可以給出平穩策略π的Q函式(原),實際上這個Q函式是不平穩的。引出我們對於Q函式式子的改變,加入我們的新運算元。
----------------------------------------------證明分割線------------------------------------
(複雜推導如下,不看可略過)
stationary,平穩性,即與時間無關。
我們假定我們的研究域 是確定性平穩的空間(確定性過程:一類特殊的隨機過程.是不受隨機因素影響的過程;平穩過程是一種重要的隨機過程,其主要的統計特性不會隨時間推移而改變)
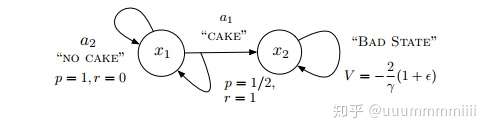
在上圖中,我們描述了MDP的兩個狀態,一個有立即獎勵但是是harmful選擇即吃蛋糕狀態 (稱為‘cake’),另一個選擇是沒有立即獎勵即不吃蛋糕狀態
(稱為‘no cake’),我們假設給agent持續的蛋糕供給(γ>0)。
吃蛋糕,既選擇狀態‘cake’,可以發生狀態轉變到x2(稱為‘bad state’),其狀態值函式:
:=-2(1+
)
對於x1狀態,選擇a1動作的動作狀態值函式
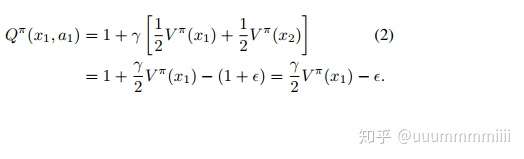
對於x1狀態,選擇a2動作的動作狀態值函式,對於任何策略π,均是不吃蛋糕(選擇動作a2)是最優策略,則V*(x1)=Q*(x1,a2)=0,因為
這樣產生了action gap:

則Q*(x1,a1)=- ,對於策略
(x1)=a1的值函式,
Q*(x1,a1)=- ,一旦吃掉蛋糕(選取動作a1)然後就放棄了(不太懂。。)
-------------------------------------------證明結束------------------------------------------
然後作者推出對Q函式的改進:
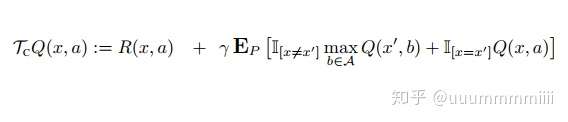 改進式(1)
改進式(1)
後面進行了證明,分析為什麼這樣新增是最優的保留運算元,並且可以增加gap
Aggregation methods
作者覺著上面對Q函式的改進(改進式1)又有侷限了,一個原因是大部分P(x|s,a)是0或者接近0,另一個原因是在進行檢測

的時候,描述狀態的特徵被排除了一些有意義的部分。
作者利用集結策略(aggregation scheme)對改進式1進行改變:
 改進式(2)
改進式(2)
其中集結策略是一個元組形式(Z,A,D),Z是一系列集結狀態,A是從X到Z的一個對映,D是從Z到X的一個對映:
Q-value Interpolation
作者又做了改進,最後得出下面這個
改進式(3)
Experiments on the bicycle domain
實驗為了讓agent在平衡模擬自行車的同時還要騎到在初始位置東邊的1km目標處,為觀察運算元產生動作狀態值函式的quality,我們用值迭代演算法而非q-learning演算法去計算Q(s,a)
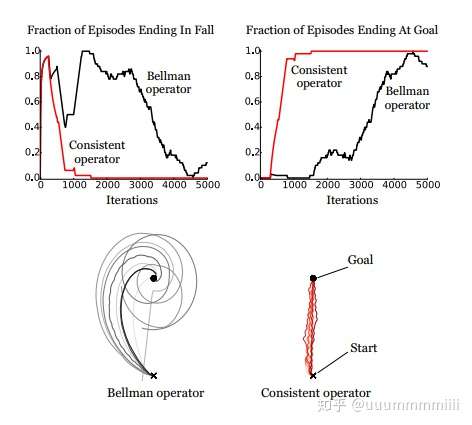
圖中上面兩個圖表示對於在兩種遊戲結束情況(摔倒,到達目標),從價值迭代中產生出的動作狀態值函式隨迭代次數的變化,可以發現,基於consistent operator的動作狀態值函式很快就收斂,但是原來的Bellman operator 收斂慢,到遊戲結束所需時間長。
圖中下面兩個圖表示自行車軌跡,用Bellman operator ,發現一直在goal附近打轉,而consistent operator很快就到達goal。
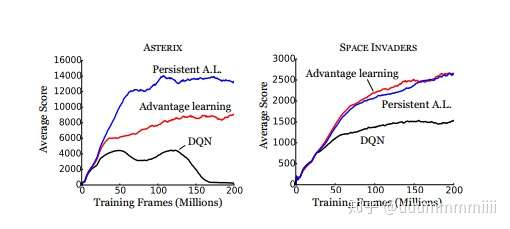
後面也做了三個運算元的實驗:DQN(用Bellman operator),AL,PAL(這倆具體是啥沒看,就是作者提出的新運算元,就摘要裡說的運算元大家族,沒準還做了一些改變),主要的改變就是在loss值處,用DQN中target網路去計算。發現大部分遊戲比DQN效能好。
我後面放棄了。。。個人感覺跟相關DQN演算法的改進沒有什麼關係,只是推導充分條件,證明,實驗驗證了,自行選擇,我就碼到這裡,暈死了,不過感覺筆記寫出來的理解的更深了,隨時還可以看一看。