
課設 - 基於微控制器的踢球智慧車系統設計(+電路原理圖)
本設計採用了STC89C52微控制器作為電動車的檢測和控制核心,通過光電探頭檢測路面黑色尋跡線,使小車按預定軌道行駛,由光電感測器檢測乒乓球位置,並進行射門。通過鍵盤控制和LCD12864液晶顯示電路對小車的運動軌跡進行記錄和顯示切換,最後通過軟體設計,實現了小車按軌道行駛、射門等功能。
1、 系統方案設計
1.1、尋跡線探測模組
探測路面黑色尋跡線的原理:光線照射到路面並反射,由於黑線和白紙的反射係數不同,可根據接受到反射光強弱由感測器產生高低電平並最終通過微控制器判斷是否到達黑線偏離跑道。
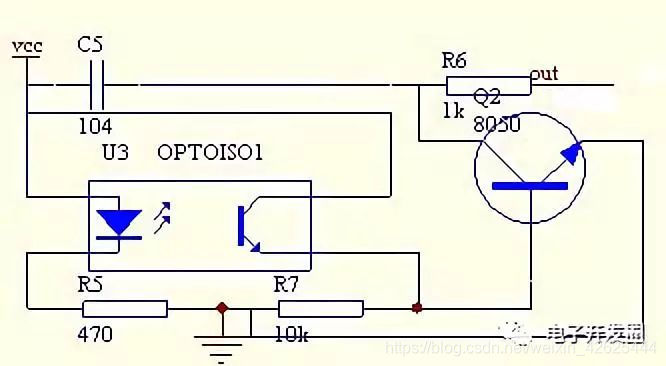
由可見光發光二極體與光敏二極體組成的發射-接收電路。該方案成本較低,易於製作,但其缺點在於周圍環境光源會對光敏二極體的工作產生很大幹擾,一旦外界光亮條件改變,很可能造成誤判和漏判;如果採用超高亮發光管和高靈敏度光敏管可以降低一定的干擾。
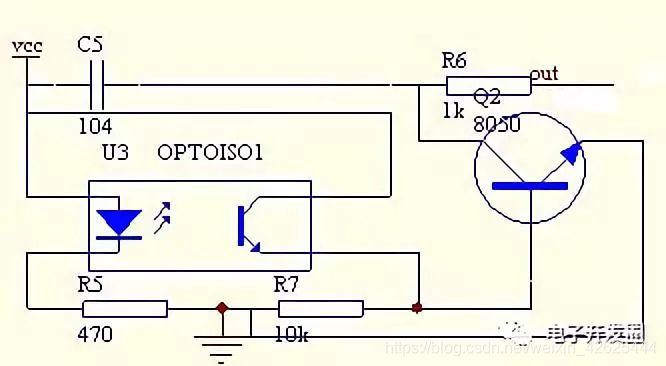
圖1 光電檢測電路
1.2、電動機及其驅動模組的選擇
根據題目中小車行駛全程的時間要求,可知小車的行駛速度很慢,普通的電機很難滿足此速度要求,而伺服電機可以滿足此要求,伺採用脈衝控制比較容易實現起跑停,並且其具有很大的轉動力矩,不會在傾斜面出現堵轉情況。故我們採用伺服電機。
在選用驅動模組方面由以下兩種方案:採用專用驅動晶片。該晶片整合度高,佔用空間小,主要應用於電機調速場合。採用分立三極體驅動電路。經分析此機器人小車所要求的功能比較簡單,不需複雜的調速,採用脈衝控制。故我們最後決定用後方案。
1.3、資訊顯示模組
採用LED,缺點是佔用微控制器介面太多,顯示資訊量少,需要迴圈顯示,佔用太多程式資源。採用LCD12864,佔用11個微控制器介面,同時顯示資訊量大,靈活多變顯示多種資訊。因此,我們擬採用後者。
1.4、電源選擇
單電源兩路供電。電動機驅動電源採用6節五號電池無穩壓供電,微控制器及其外圍電路電源採用5V穩壓電源供電,這樣兩路互不影響。
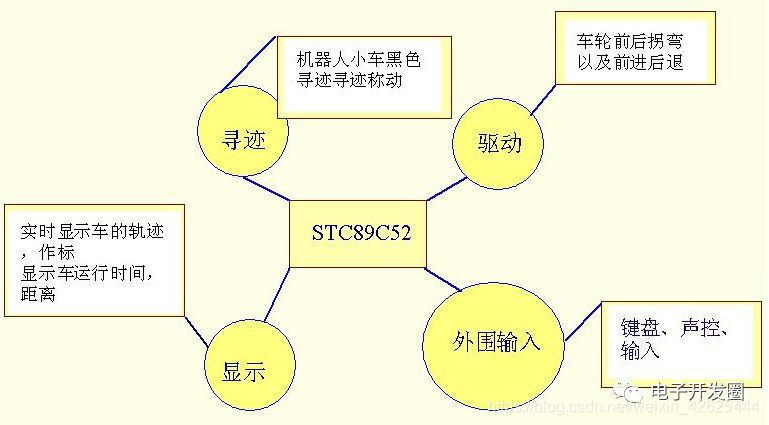
2、系統總體設計方案
根據題目的基本要求,設計任務主要完成機器人在規定時間內按規定路徑穩定行駛,並能進行射門,同時對行程中的有關資料進行處理顯示。

該系統主要由電動機驅動模組、尋跡線探測模組、紅外避障礙、資訊顯示模組幾個部分組成。由89C52微控制器為系統控制的CPU對小車尋跡、乒乓球檢測和LED顯示進行控制,使小車在規定的時間內完成規定的路線,並檢測乒乓球送入球門,完成題目的要求。
3、系統硬體電路設計
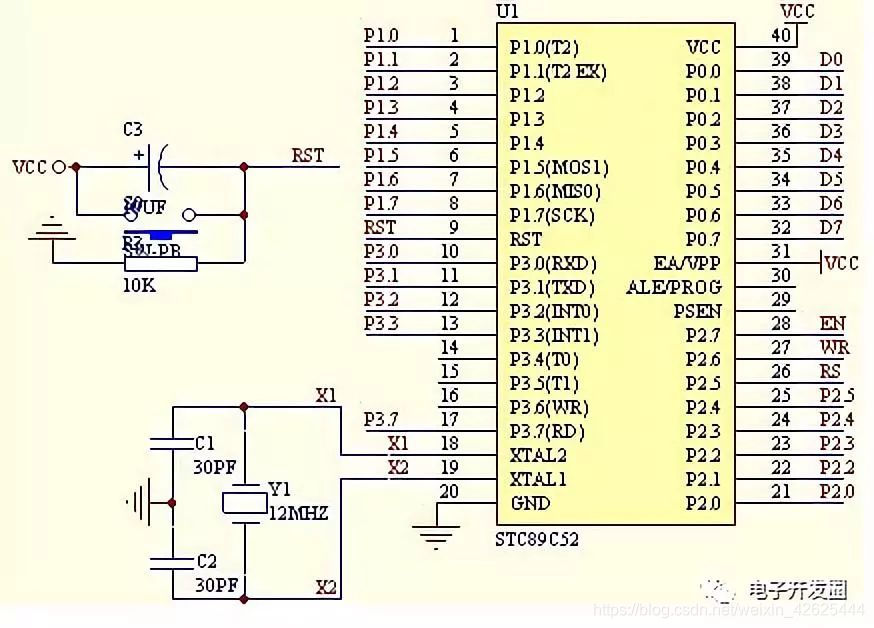
3.1、微控制器最小系統
該最小系統主要採用STC89C52用為電路的控制晶片。
3.2、尋跡線探測電路設計
採用光電探測器,該探頭輸出端只有三根線(電源線、地線、訊號線),只要將訊號線接在微控制器的I/O口,然後不停地對該I/O口進行掃描檢測,當其為低電平時則檢測到白紙,否則為高電平時則檢測到黑線區域。小車前進(倒退)時,始終保持黑線在車頭二個感測器之間,當小車偏離黑線時,探測器一旦探測到有黑線,微控制器就會按照預先編定的程式傳送指令給小車的控制系統,控制系統再對小車路徑予以糾正。當小車回到了軌道上時,車頭兩個探測器都只檢測到白紙,則小車繼續直線行走,否則小車會持續進行方向調整操作,直到小車恢復正常。
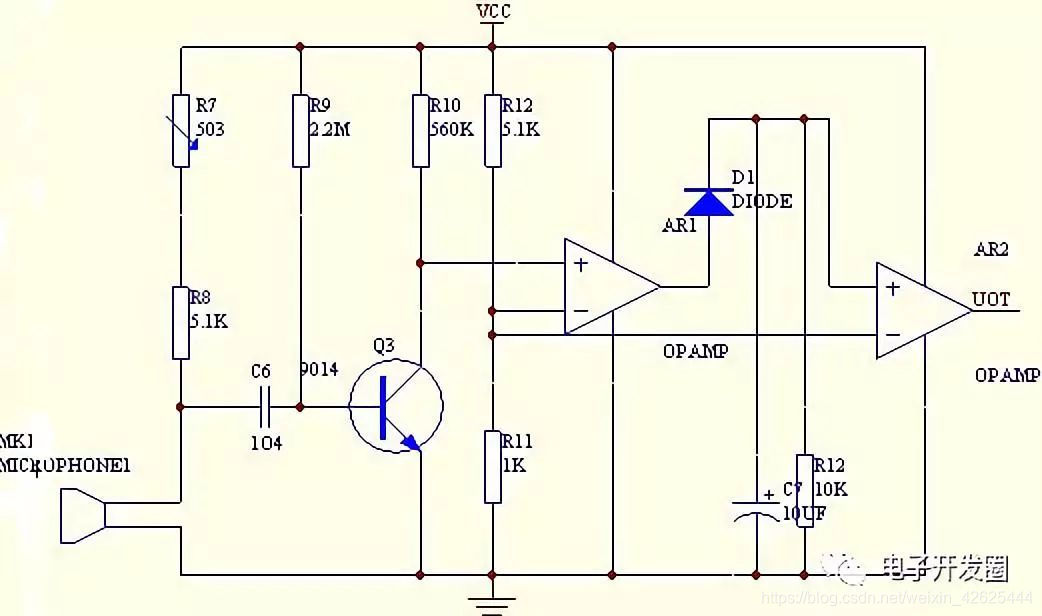
3.3、聲控檢測電路設計
電路採用LM358作為比較器。當有響聲時,話筒將聲音訊號轉換為電訊號,經三極體放大,運放比較輸出。因為輸出訊號有抖動,對微控制器的接收有所幹擾。考慮到I/O口接收的問題,電路多加了延時電路,能更好的防止抖動。
3.4、光電檢測乒乓球位置電路設計
乒乓球檢測電路與尋跡電路相原相同,只是乒乓球檢測電路光電感測器靈敏度不要尋跡那麼靈敏。
3.5、 電動機驅動電路設計
該電路電機採用脈衝擊驅動,根據脈PWM不同進而控制電機的前進和後退以及左右轉向。
4、系統軟體設計
當開機時,系統上電覆位,各項初始化,系統等待1秒鐘,檢測聲控,然後進入自動執行狀態。為機器人小車執行及方向調整程式,使小車按預定路線執行,並且在小車偏離軌道後自動調整走向使小車自動返回預定路線,當檢測到兵時,停兩秒並聲音提示,然後進行射門,並且控制LCD實時顯示執行時間,軌跡,距離。

附:系統電路圖

獲取課設全部資料,掃碼關注傳送【踢球小車】,更多雲盤學習資料等你下載。
