
歐洲頂尖實驗室研發的這個雙足平衡機器人,與波士頓動力相差幾何?
來源 | 機器人大講堂
原創 | 堂博士
DLR是歐洲最優秀的機器人實驗室之一,90年代初期其因為希望將機械手臂送上太空代替人類,開始開發輕量化機械臂,擁有LWR,Hasy,人形機器人Justin和TORO等多個知名機器人。最近,YouTube上一段TORO機器人控制平衡的視訊引來不少點選,其實TORO機器人已經經歷了幾個版本的“升級”,今天我們就來介紹一下德國宇航局的人形機器人TORO以及它的夥伴們。
大家看TORO的樣子,有沒有覺得它和我們之前介紹過的一款名為Rollin'Justin的人形機器人有些像,Rollin'Justin也出自DLR實驗室,曾向我們展現過優秀的家務能力,還能協助太空宇航員。

(機器人Rollin'Justin)
有腿的仿人機器人要能執行多種任務。它們要能與環境互動,遇到外部障礙時能扭轉身體,同時還要保持穩定協調的平衡。
為此,研究人員提出一種新的控制方法,把多級別控制和平衡結合。他們在仿人機器人TORO身上模擬了這種方法。為了達到恰當平衡,他們先把所有的任務力/力矩分配到終端受動器,然後按照任務級別對映到連線空間。

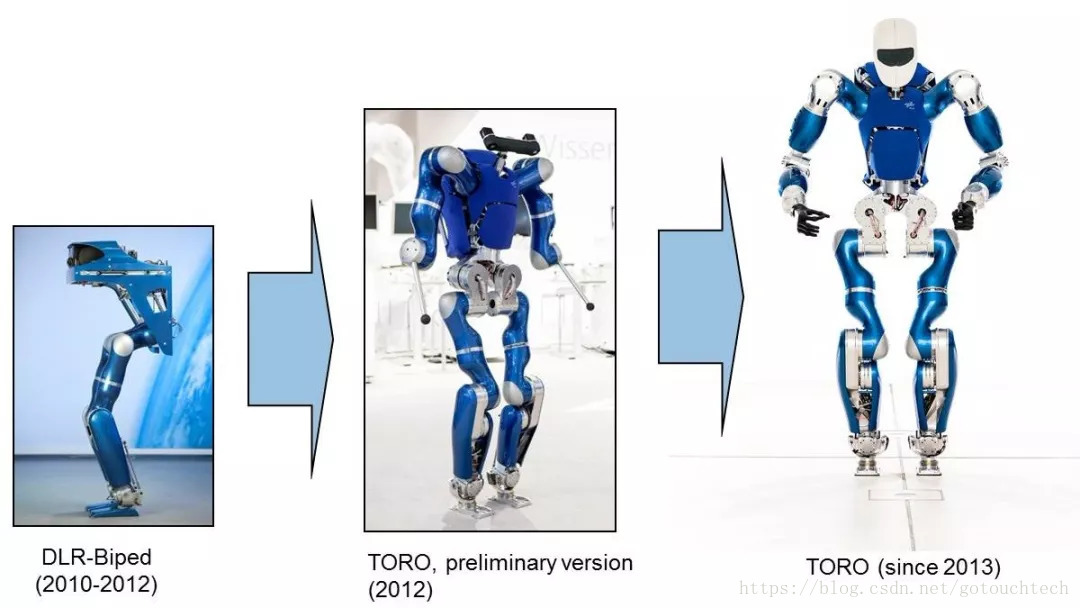
TORO的總重量約為75千克,高度約為160釐米。是基於前DLR-Biped雙足類人機器人設計而來。為了適應腿部基礎並減少行走時的負荷,研究人員重新設計了髖部結構。前兩個肩關節由DLR輕型機器人手臂的一部分組裝,而其餘部分則是定製的。
為了與環境相互作用,TORO的手臂配備了鉸接式指標。由於TORO將主要用於研究與全身動力學相關的控制導向問題,因此研究人員決定使用相當簡單但堅固的假手。
這些手能夠與環境進行多種互動,但在靈巧操作方面則受到一些限制。對於環境感知和運動估計,該系統配備有立體攝像頭,IMU和Kinect感測器的致動頭。
下面這個機器人是DLR研發的擬人機器人David。以前David是被稱為DLR手臂系統,具有可變剛度執行器(VSA)的關節,其在傳動系中具有機械可調節的靈活性。其發展的一個目標是接近人的能力,特別是在動力學,靈活性和穩健性方面。該機器人於2010年首次公開展出。
別看David是一個成年人的樣子,重量只有26公斤,具有41個自由度,165個位置感測器,據說在與人類相近的工作空間內,其工作速度可以與人類相媲美。

和Rollin'Justin長得比較像的另一個機器人叫SpaceJustin,是一個人形上身,由兩個輕型機器人手臂,兩個DLR-HIT手,一個軀幹和一個頭部組成。

DLR還研發過一個蜘蛛外型的Crawler機器人,足跡5釐米x 38釐米,離地間隙最大12釐米。質量3.66千克,具有18個活動腿關節。有效載荷為3公斤,速度高達20釐米/秒,該機器人於2008年首次向公眾展示。

針對地面和地外探測,研究人員為DLR Crawler開發的所有運動和導航相關演算法都集中在先驗未知的GPS拒絕環境。DLR爬行器的步態演算法採用高度靈活,分散的方法,其中相鄰的腿通過抑制或激發步伐運動而相互影響。
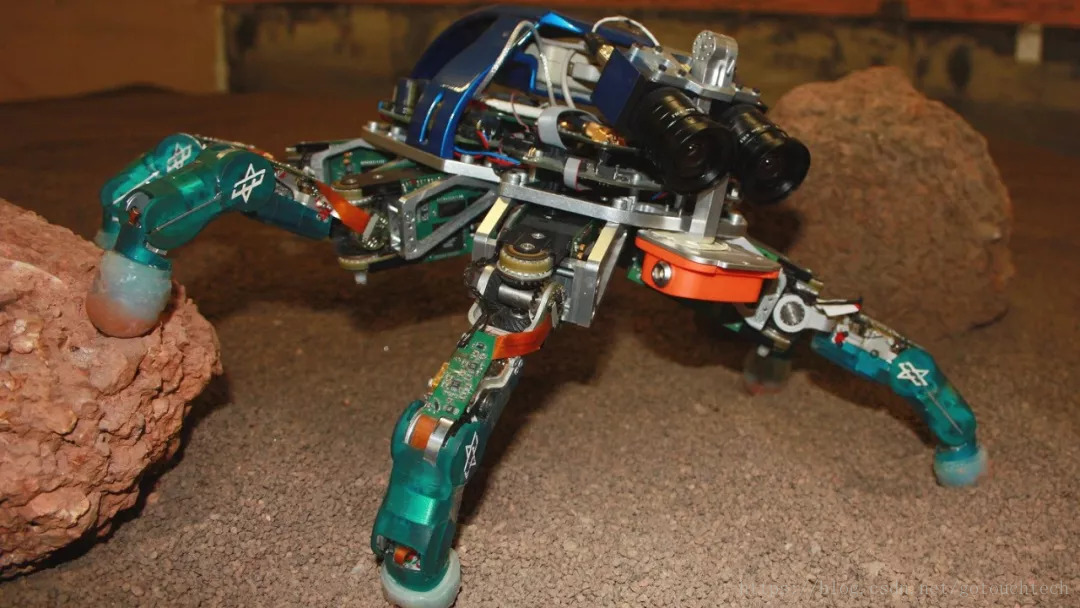
因此,DLR爬行者的步態不顯示固定模式,而是根據命令速度和腿與當地環境的相互作用而出現。為了在未知地形中導航,DLR Crawler還裝有立體攝像頭,基於半全域性匹配的立體視覺演算法,機器人可評估地形的可穿越性,並僅根據其車載感測器獲取的資訊計劃到達目標。