
2018-2019-1 20165301 20165304 20165314 實驗四 外設驅動程式設計
阿新 • • 發佈:2018-12-02
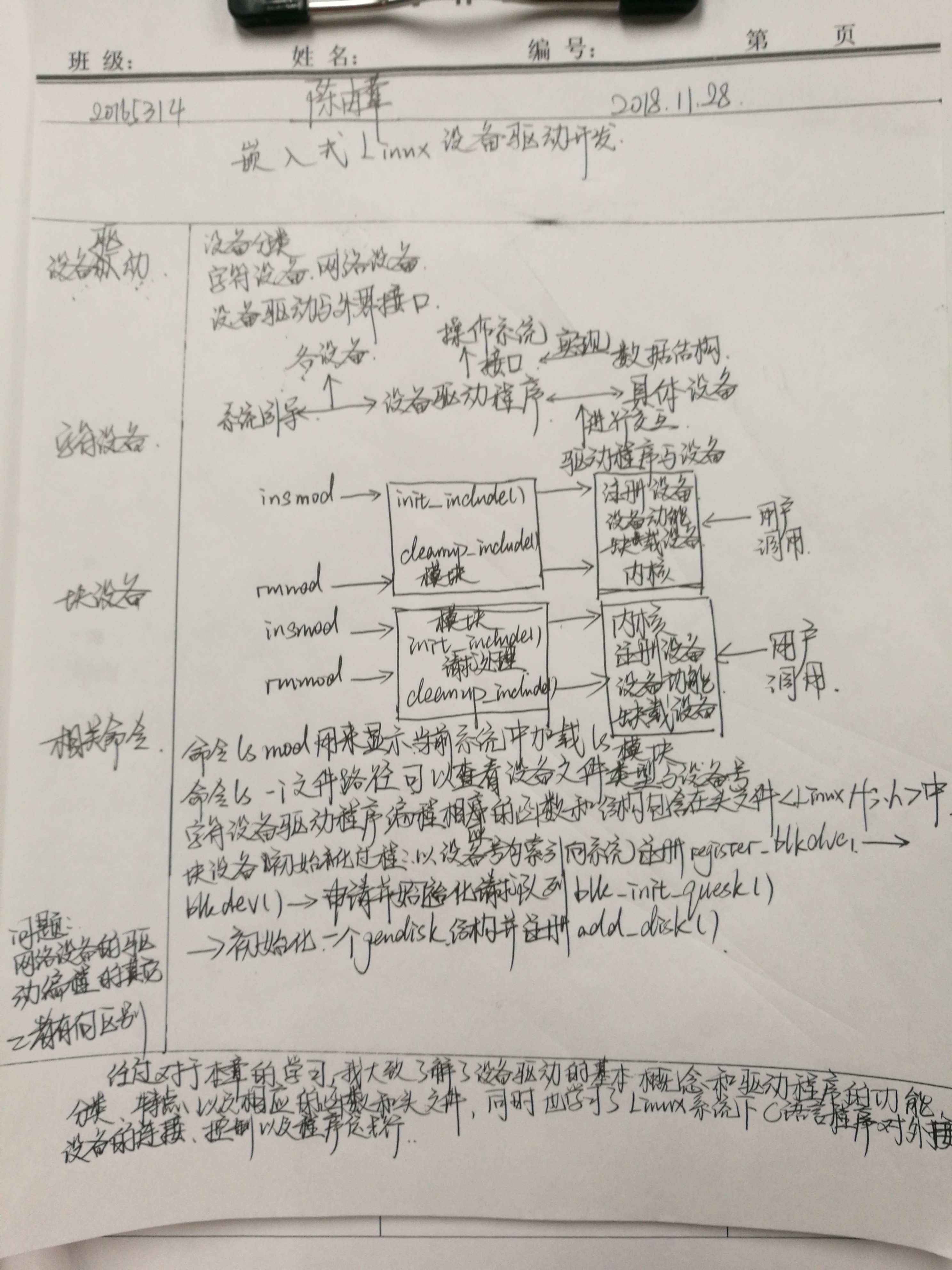
一、學習資源中全課中的“hqyj.嵌入式Linux應用程式開發標準教程.pdf”中的第十一章提交康奈爾筆記的照片:
二、在Ubuntu完成資源中全課中的“hqyj.嵌入式Linux應用程式開發標準教程.pdf”中的第十一章的test試驗
提交編譯,載入模組,解除安裝模組,測試執行的截圖(要多張,全屏,體現學號資訊)
實驗程式碼
/* test_drv.c 程式原始碼 */ #include <linux/module.h> #include <linux/init.h> #include <linux/fs.h> #include <linux/kernel.h> #include <linux/slab.h> #include <linux/types.h> #include <linux/errno.h> #include <linux/cdev.h> #include <asm/uaccess.h> #define TEST_DEVICE_NAME "test_dev" #define BUFF_SZ 1024 /*全域性變數*/ static struct cdev test_dev; unsigned int major =0; static char *data = NULL; /*讀函式*/ static ssize_t test_read(struct file *file,char *buf, size_t count, loff_t *f_pos) { int len; if (count < 0 ) { return -EINVAL; } len = strlen(data); count = (len > count)?count:len; if (copy_to_user(buf, data, count)) /* 將核心緩衝的資料拷貝到使用者空間*/ { return -EFAULT; } return count; } /*寫函式*/ static ssize_t test_write(struct file *file, const char *buffer, size_t count, loff_t *f_pos) { if(count < 0) { return -EINVAL; } memset(data, 0, BUFF_SZ); count = (BUFF_SZ > count)?count:BUFF_SZ; if (copy_from_user(data, buffer, count)) /* 將使用者緩衝的資料複製到核心空間*/ { return -EFAULT; } return count; } /*開啟函式*/ static int test_open(struct inode *inode, struct file *file) { printk("This is open operation\n"); /* 分配並初始化緩衝區*/ data = (char*)kmalloc(sizeof(char) * BUFF_SZ, GFP_KERNEL); if (!data) { return -ENOMEM; } memset(data, 0, BUFF_SZ); return 0; } /*關閉函式*/ static int test_release(struct inode *inode,struct file *file) { printk("This is release operation\n"); if (data) { kfree(data); /* 釋放緩衝區*/ data = NULL; /* 防止出現野指標 */ } return 0; } /* 建立、初始化字元裝置,並且註冊到系統*/ static void test_setup_cdev(struct cdev *dev, int minor, struct file_operations *fops) { int err, devno = MKDEV(major, minor); cdev_init(dev, fops); dev->owner = THIS_MODULE; dev->ops = fops; err = cdev_add (dev, devno, 1); if (err) { printk (KERN_NOTICE "Error %d adding test %d", err, minor); } } /* 虛擬裝置的 file_operations 結構 */ static struct file_operations test_fops = { .owner = THIS_MODULE, .read = test_read, .write = test_write, .open = test_open, .release = test_release, }; /* 模組註冊入口 */ int init_module(void) { int result; dev_t dev = MKDEV(major, 0); if (major) {/* 靜態註冊一個裝置,裝置號先前指定好,並設定裝置名,用 cat /proc/devices 來檢視*/ result = register_chrdev_region(dev, 1, TEST_DEVICE_NAME); } else { result = alloc_chrdev_region(&dev, 0, 1, TEST_DEVICE_NAME); } if (result < 0) { printk(KERN_WARNING "Test device: unable to get major %d\n", major); return result; } test_setup_cdev(&test_dev, 0, &test_fops); printk("The major of the test device is %d\n", major); return 0; } /* 解除安裝模組 */ void cleanup_module(void) { cdev_del(&test_dev); unregister_chrdev_region(MKDEV(major, 0), 1); printk("Test device uninstalled\n"); }
/* Makefile */ KERNELDIR=/usr/src/4.4.0-101-generic ifeq ($(KERNELRELEASE),) KERNELDIR ?= /lib/modules/$(shell uname -r)/build PWD := $(shell pwd) modules: $(MAKE) -C $(KERNELDIR) M=$(PWD) modules modules_install: $(MAKE) -C $(KERNELDIR) M=$(PWD) modules_install clean: rm -rf *.o *~ core .depend .*.cmd *.ko *.mod.c .tmp_versions .PHONY: modules modules_install clean else obj-m := test_drv.o endif
/* test_drv_load 載入指令碼 */ #!/bin/sh # 驅動模組名稱 module="test_drv" # 裝置名稱。在/proc/devices中出現 device="test_dev" # 裝置檔案的屬性 mode="664" group="david" # 刪除已存在的裝置節點 rm -f /dev/${device} # 載入驅動模組 /sbin/insmod -f ./$module.ko $* || exit 1 # 查到建立裝置的主裝置號 major=`cat /proc/devices | awk "\\$2==\"$device\" {print \\$1}"` # 建立裝置檔案節點 mknod /dev/${device} c $major 0 # 設定裝置檔案屬性 chgrp $group /dev/${device} chmod $mode /dev/${device}
/* test_drv_unload 解除安裝指令碼 */
#!/bin/sh
module="test_drv"
device="test_dev"
# 解除安裝驅動模組
/sbin/rmmod $module $* || exit 1
# 刪除裝置檔案
rm -f /dev/${device}
exit 0/* test.c 測試程式碼 */
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/stat.h>
#include <sys/types.h>
#include <unistd.h>
#include <fcntl.h>
#define TEST_DEVICE_FILENAME "/dev/test_dev" /* 裝置檔名*/
#define BUFF_SZ 1024 /* 緩衝大小 */
int main()
{
int fd, nwrite, nread;
char buff[BUFF_SZ]; /*緩衝區*/
/* 開啟裝置檔案 */
fd = open(TEST_DEVICE_FILENAME, O_RDWR);
if (fd < 0)
{
perror("open");
exit(1);
}
do
{
printf("Input some words to kernel(enter 'quit' to exit):");
memset(buff, 0, BUFF_SZ);
if (fgets(buff, BUFF_SZ, stdin) == NULL)
{
perror("fgets");
break;
}
buff[strlen(buff) - 1] = '\0';
if (write(fd, buff, strlen(buff)) < 0) /* 向裝置寫入資料 */
{
perror("write");
break;
}
if (read(fd, buff, BUFF_SZ) < 0) /* 從裝置讀取資料 */
{
perror("read");
break;
}
else
{
printf("The read string is from kernel:%s\n", buff);
}
} while(strncmp(buff, "quit", 4));
close(fd);
exit(0);
}實驗過程中遇到的問題
makefie檔案中gcc、rm、cp前面是tab分割符,不能用空格,否則會出現:“makefile:x: *** 遺漏分隔符 。 停止。”;執行第二次時sudo./test_drv_unload命令無效,需要重啟電腦才可以。實驗體會
makefile中需要修改的地方的含義:KERNELDIR表示核心原始碼路徑,INCLUDEDIR表示配置檔案,#CROSS_COMPILE表示編譯適合編譯的主機執行的二進位制檔案。
通過這次實驗,我們知道了在執行外設驅動程式時,要插入驅動模組 demo.o,要在/usr/src下建立一個linux連線,如果是使用交叉編譯器,不需要建立裝置節點等等。