
機器人運動學與動力學入門(一)自由度與連桿機構
機器人運動學與動力學入門(一)自由度與連桿機構
在討論機器人運動之前,先複習一些基本概念(囉裡吧嗦環節)。已經瞭解的童鞋可以自行跳過該節。
1.自由度(degree of freedom)
自由度描述一個物體可以自由運動的獨立程度(廢話)
比如:
- 一個只有一根座標軸的系統上的點只可以左右運動,只能用一個值x來唯一描述,所以只有一個自由度。
- 一個平面上的一個點可以用(x,y)唯一表徵它的位置,因此有兩個自由度。
- 一個三維座標系上的一個點需要用(x,y,z)來唯一表徵它的位置,因此有三個自由度。
那麼,什麼是機器人的自由度?
在回答這個問題之前,需要了解一下什麼是剛體,什麼是機器人。
2.機器人定義
我們這裡研究的機器人具體代指一類由連桿(link)+ 關節(joint)組成的連桿機構(linkage),強調一下連桿和關節,因為以後我們會經常跟這兩個詞打交道,這些連桿都是剛體(rigid body)。
剛體(百度百科:剛體是指在運動中和受力作用後,形狀和大小不變,而且內部各點的相對位置不變的物體)
有兩種型別的的連桿機構:級聯鏈(serial chains)和平行鏈(parallel chains)
也叫開鏈和閉合鏈。
級聯鏈結構機器人

優點:相對於平行鏈機器人,工作範圍更廣
缺點:因為誤差一級級積累,因此相對於平行鏈機器人,精度要低一些。也因為每一級關節單獨受力,所以載重也相對低。
平行鏈結構機器人

優點:相對於級聯鏈機器人,精度高,載重大
缺點:相對於級聯鏈結構機器人,工作範圍小
3.運動
運動(motion)包括兩種:平移(translation)和旋轉(rotation),因此:
- 在二維平面裡,一個剛體有三個自由度:兩個平移的自由度(x,y),一個旋轉的自由度。
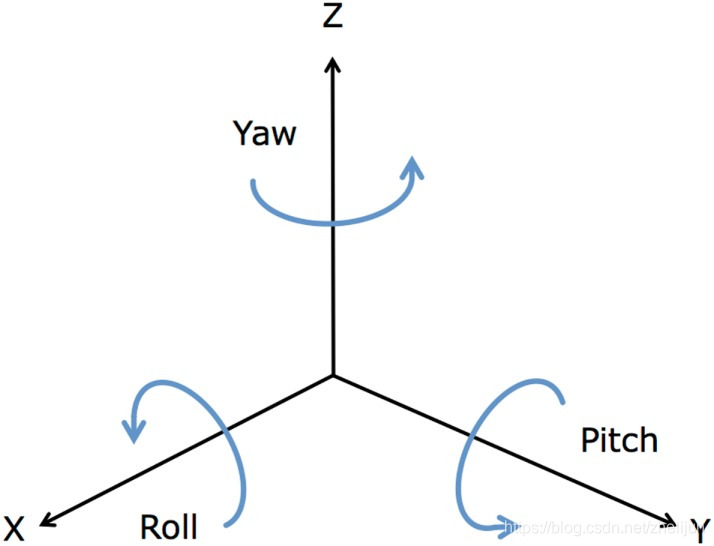
- 在三維座標系中,一個剛體則有六個自由度: 三個平移自由度(x,y,z),三個旋轉自由度(roll,pitch,yaw)(這三個旋轉自由度符合右手旋轉定則,見下圖)
4.關節與連桿的符號表達
可以使用以下表達方式來給我們要研究的機器人結構建模
連桿:
通常用一根線段表示連桿
關節:
-
旋轉關節一

這是一個z軸指向外面,逆時針為正的旋轉關節 -
旋轉關節二
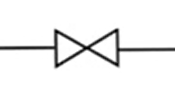
這是一個z軸沿著連桿指向左或者右,繞著z軸旋轉的旋轉關節 -
平移關節
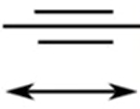
這是一個沿著連桿伸長縮短的平移關節 -
末端執行器

一個連桿機構機器人模型
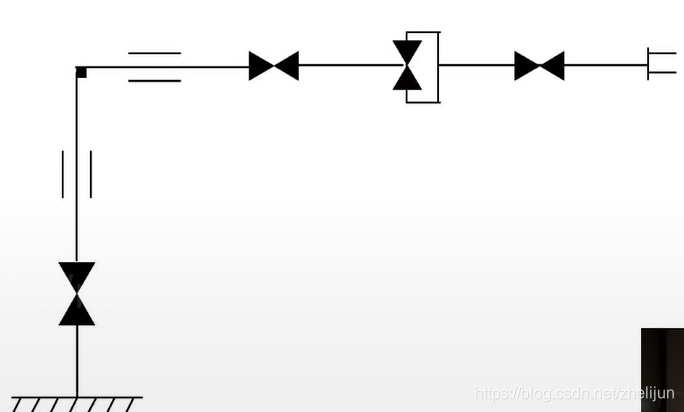
至此我們就可以用這些符號表達輕鬆地給我們要研究的機器人建模了。
到這裡我們再看一開始的問題:什麼是機器人的自由度?
可以發現,一個關節就代表了一個自由度。因此,想要知道一個機器人有多少自由度,只要數出有多少個關節就可以了。