
【譯】Optaplanner開發手冊本地化: (0)
在此之前,針對APS寫了一些理論性的文章;而對於Optaplanner也寫了一些介紹性質,幾少量入門級的幫助初學者走近Optaplanner。在此以後,老農將會按照Optaplanner官方的使用者手冊的結構,按章節地對其進行翻譯,併成型一系列的操作說明文章。在文章中,為了降低對原文的理解難度,有些地方我不會直接按原文件的字面翻譯,而是有可能加入一些我自己的理解,或添一些解釋性的內容。畢竟英語環境下的思維和語言表達方式,跟中文或多或少會有差別的,所以如果全部按字面翻譯,內容就非常生硬,可讀性差,解程難度較大。我認為應該在理解了作者原意的基礎上,再進一步以中文方式的表達,才算是真的的本地化。記得老農還是少農時,學習開發技術,需要閱讀一些外國書箱的翻譯本時,印象最深的是候捷老師的書,儘管《深入淺出MFC》,磚頭厚度的書,硬是被我翻散了線,MFC儘管真的晦澀難懂,但候老卻能把Windows的訊息機制及MFC中整個個巨集體系,系統地通俗地描述出來,令讀者不需要花費太多精力去理解猜測書中字面的意義,大大降低的VC++中MFC的學習門檻。但老農畢竟只是一個一線開發人員,不是專業的技術資料翻譯人才,不可能有候老師的專業水平,因此,我也只可盡我所能把內容儘量描述得通俗一些,讓讀者儘量容易理解,花費更少的時間掌握這些知道要點。
本文以Optaplanner 7.10.0 Final版本的開發手冊作為基礎進行翻譯。
1. Optapplanner 介紹
1.1. 什麼是Optaplanner?
每個組織都需要面對規劃、排程問題:在有限的資源約束下提供服務與產品(例如人員,資產,時間及資本等限制)。Optaplanner可以優化這類規劃、排程問題,令到使用它的組織可以用更少的資源做更多的事(儘可能的花少錢辦大事)。這就是著名的的約束滿足規劃,它屬於運籌學的一部分。
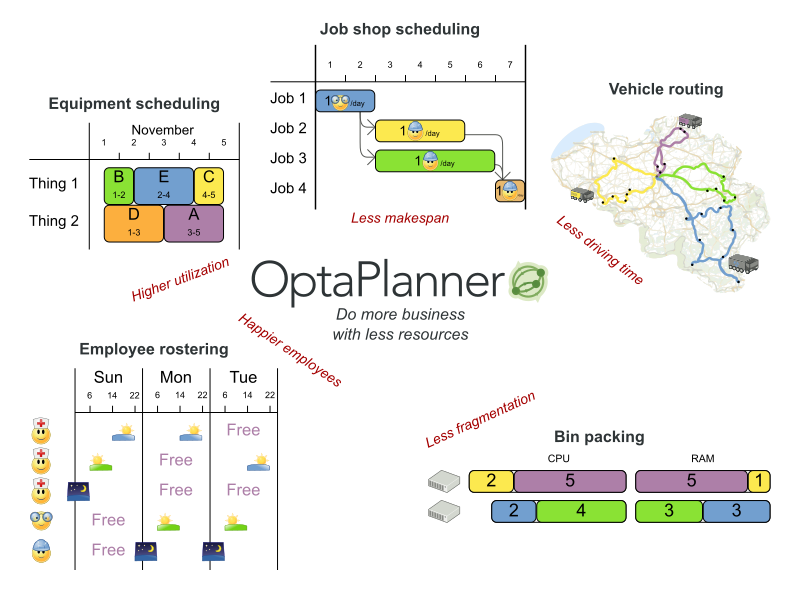
Optaplanner是一個輕量的、可嵌入的,可以對規劃問題進行優化的約束滿足引擎,它可以解決案例有:
- 員工排班:為護士、維修工等人員制定上班時間表。
- 方程安排:安排會議、約見、維修工作、廣告時間等。
- 教育領域的時間安排:安排課程、課堂、考試、會議講座等。
- 規劃車輛運動路線:通過已知的地圖工具,為貨運、客運(貨車、火車、輪船、航班等)規劃交通工具多目標的執行路線。
- 裝箱問題:向容器、貨車、輪船和倉庫裝載貨物,同時可以規劃電腦的資源載入利用,例如雲計算的資源分配問題。
- 車間生產安排:規劃汽車組裝生產線,機器隊規劃,勞動任務的規則等。
- 下料問題:在下料分割的時候,實量最小的浪費,例如切割紙張、鋼鐵、地毯等。
- 運動賽事安排:規劃比賽和訓練,例如安排足球聯賽、棒球聯賽等。
- 金融優化:投資組合優化、實現風險分散等。
1.2. 什麼是規劃問題?
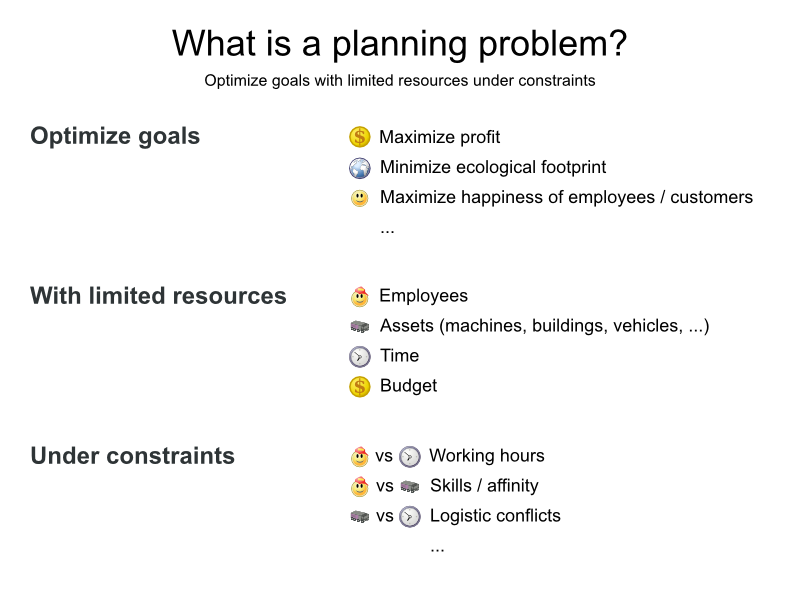
一個規劃問題,基於有限的資源和指定的約束,有一個優化目標。優化目標可以是多種事物,例如:
- 利潤最大化 - 優化目標得出的結果是儘可以高的利潤。
- 最小化生態足跡(即儘可能減少對生態的影響) - 優化目標是對環境產生儘可能小的影響。
- 最大化員工或客戶的滿足度 - 優化目標重視員工與客戶的需要。
實現這些目標的能力依賴於可用資料的數量,例如:
- 人員數量
- 時間
- 預算
- 特殊資產,例如機臺,車輛,計算機,建築物等。
與這此資源相關的約束也必然計算在內,例如,一個人的工作小時數, 他們可使用(操作)的機臺數量,裝置之間的相容性等。
Optaplanner可以幫助Java程式設計師有效地解決約束滿足問題, 在Optaplanner引擎中,對每個有效的約束分數計算中,組合了啟發式和元啟發式演算法。
1.2.1 規劃問題屬於NP-Complete問題或NP-hard問題
上述所有的案例或許都屬於NP-complete/NP-hard問題,(什麼是NP-Complete/NP-hard問題呢?),在外行人看來,它的定義是:
對於一個問題:
- 在合理時間內可以容易地驗證一個給定的解。
- 在合理時間內,目前尚沒有行之有效的解法,能找到其絕對最優解(注1)。
(注1):至少,到目前為止,仍未有一個世界上最聰明的電腦科學家能找到此方法。可是一旦他們找到對其中一個NP-Complete問題的有效解法,那麼這個方法對所有NP-Complete問題都是可行辦法。事實上,如果任何人只需證明是這種解法的存在與否,即可獲得100萬美元的獎勵。
其實這其含義是相當悲觀的:要解決這些問題或許比你預想中更困難,因為目前針對這種問題的常見兩種技術是未足夠解決此類問題的。這兩種方法是:
- 暴力演算法(儘管是一些優化過,相對聰明的暴力演算法變種), 但獲得其解所需的時間非常長(譯者:主要原因是時間複雜度非常高)。
- 快速演算法,例如在Bin packing問題中,先裝入最大項;但得到的解離絕對最優解仍存在相當大距離的。
通過使用一些更高階的演算法,Optaplanner可以在合理的時間內,對這些規劃問題找到相對較優解。
1.2.2 規劃問題存在約束(包括硬約束與軟體約束)
通常來說,一個規劃問題至少包括兩個層次的約束:
- (負面)硬約束,不可被違反。例如:一個教師在同節的時間內不能同時上兩門課。
- (負面)軟體約束,若可避免,它不應該被違反。例如:教師都不太喜歡在週五下午上課。
也有些問題存在一些正面的約束:
- 正面分數在可能情況下應該實現。例如:教師B喜歡在週一上午上果。
一些比較基礎的規劃問題(例如8王后問題),只存在硬約束;有一些規劃問題則存在超3層,甚至更多層次的約束。例如:硬約束,中間約束和軟約束。
這些約束會被定義在規劃問題的Score calculation裡(也稱為適應度函式)裡。規劃問題裡的每一個解的優劣,都可以通過分數來評價。在Optaplanner中,分數約束是通過面向物件語文編寫的,例如Java程式碼或通過Drools指令碼實現的rules. 這些程式碼相當容易編寫,靈活且易於擴充套件。
1.2.3 規劃問題存在巨大的搜尋空間
一個規劃問題存在非常多的解,這些解可以分為以下數種:
- 可能解:規劃問題的任意一個解都稱作可能解,無論這個解是否違反了約束,或違反了多少約束。規劃問題往往存在令人難以至今的巨量可能解,這裡面很多解是毫無價值的。
- 可行解:規劃問題的可行解是指沒有違反任何(負面)硬約束的解。一個規劃問題的可行解的數量,與其可能解相關。有時也不存在可行解,一個規劃問題的每一個可行解,都是該問題的一個可能解。
- 絕對最優解:絕對最優解是這個規則問題獲得約束分最高的那個解。規劃問題通常只有1個或少量數個絕對最優解。通常存在至少1個絕對最優解,儘管當這個規劃問題不存在可行解,它也存在絕對最優解,這時候絕對最優解就是非可行解。
- 相對最優解:相對最優解是指規劃問題在一定的求解時間內得到評分最高的解。相對最優解通常是可行解,只要有足夠的執行時間,找到的相對最優解就是絕對最優。
此外,儘管基於一個較小的資料集描述的一個規劃問題,其可能解的數量通常是非常巨大的(如果計算正確的話)。正如你從示例中可以看到,大多數情況下,一個規劃問題的可能解數量,對目前已知宇宙的原子數量還要多(10的80次方)。因為目前還沒有直接的辦法找出規劃問題的絕對最優解,一些求解實現方法是通過暴力窮舉的方法,至少可以窮舉所有可能解中的一個子集。
OptaPlanner支援多種優化演算法,以有效地涉足大量可能解,根據不同使用場景的情況,一些優化演算法的效能比其它演算法更佳,但哪個更佳是無法預先告知的(譯者:需要通過Benchmark等功能測定)。在Optaplanner裡,很容易能過修改幾行XML內容或Java code,來更改求解器的配置,從而切換不同的優化演算法。
【未完,待續...】
原創不易,如果覺得文章對你有幫助,歡迎點贊、評論。文章有疏漏之處,歡迎批評指正。
歡迎轉載,轉載請註明原文連結:http://www.cnblogs.com/kentzhang/p/8709679.html
如果大家有何建議,歡迎大家加我企鵝一起探討:12977379或V信:13631823503。
其實 Optaplanner規劃引擎不需要對Java過份精通即可使用,因為它使用到的都是Java最基本的知道,但還是需要有基本的Java知識才行,希望大家找我研究討論時,如果Java, Maven等方面仍接觸較少,請大家先行自補該方面的知識,本猿暫時只能跟大家探討Optaplanner, Drools的應用,而Java相關的知識,恕無法提供有效的幫助,畢竟本猿也只是個Java新手。先謝了。