
無人機飛行控制演算法、控制律設計軟體與半物理模擬
- 工業級多功能可程式設計飛行控制系統
- 專業的圖形化控制律設計軟體
- 靈活強大的工程應用開發平臺
- DSP處理器及高精度感測器
- 自定義高速遙測資料採集
- 嵌入式半物理模擬系統
- 豐富的使用者裝置介面
- 適用於固定翼、旋翼機、特殊飛行器、車船艇、機器人、雲臺等
概 述:
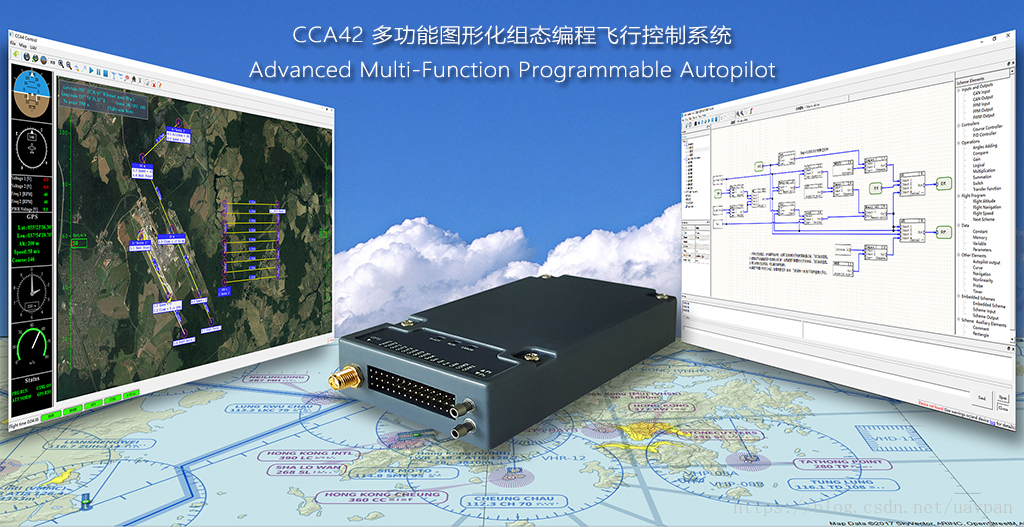
CCA42多功能圖形化組態程式設計飛行控制系統,集成了無人機飛行及任務控制、飛行資料高速採集、控制系統組態建模設計和半物理模擬等四大功能,非常適合專業使用者根據個性化需求進行工程開發和應用擴充套件。
使用者根據控制物件的特性、控制要求和控制目的,使用控制律組態建模軟體按需選擇功能模組,用滑鼠將需要相互關聯的功能模組用連線連線,就構成了結構和流程直觀清晰的系統應用程式。使用者能夠快速方便地從理論設計直接進入到實現開發階段,高效率地完成控制系統的組態建模、系統辨識、動態模擬以及實時系統執行。
飛行控制律設計軟體擁有豐富的通用和專用功能模組資源、靈活強大的組態編輯功能、演算法邏輯校驗、線上除錯執行和嵌入式半物理模擬系統,相容多種通訊協議、支援多種硬體裝置。使用者不需要書寫任何程式程式碼,就能夠完成飛行器所需的各種複雜功能的工程控制演算法設計、除錯和模擬。
硬體組成:

- 三軸角速率陀螺、三軸加速度計、三軸磁力計
- 雙嘴空速感測器、氣壓高度計
- 10Hz GPS, GLONASS, BeiDou, Galileo四系統衛星接收機
- DSP數字訊號處理器 、CPLD、24 位A/D轉換器
- 16通道CAN Aerospace 裝置擴充套件匯流排
- 雙電源寬電壓冗餘供電系統
- 18通道PPM 控制訊號輸入
- 18通道舵機輸出
- 2通道電壓監測
- 2通道轉速監測
- 8G外接USB高速飛行資料記錄器
特色功能:
- 控制律圖形化組態建模技術,快速構建功能強大的飛行控制系統。
- 固定翼、旋翼雙模式高精度動態三維姿態解算。
- 提供100多項精密測量資料,各項資料傳輸速率可分別定義,最高速率100Hz。
- AHRS和GPS-INS慣性組合導航演算法。
- 優異的寬頻耐震特性,可用於各種嚴酷的使用環境。
- 齊格勒—尼科爾斯階躍和頻率響應兩種PID控制器引數整定器。
- JSBSim飛行動力學模型和FlightGear飛行模擬器組成的半物理模擬系統。
- CAN Aerospace協議裝置擴充套件匯流排 ,可接入各種使用者裝置和感測器等。
- 軍品安全保密規範設計,內部程式和航行資料只能寫入不能讀取和匯出。
- 方便靈活的航行控制方式,隨時隨地可從任意航線的任意航點開始飛行。
- 多種飛航模式:智慧壓線飛航模式、航點駐留飛航模式、指點駐留飛航模式等。
- 飛行計劃由多條航線組成,最多100條航線,支援KML航線檔案匯入。
- 每條航線可設定1000個航點,每個航點可定義23項引數和18項任務操作。
- 多邊形掃描航線,可定義航線掃描方向、航線間隔、界外餘量、轉彎方向等。
- 5種線上地圖:Google路線圖、混合圖、衛星圖、地形圖、Open Street開放街圖,具備快取記憶體可離線使用。
- 自定義儀表顯示方式,自定義操作按鈕和互動視窗。
- 視訊疊加、基站GPS 、飛行歷史回放、飛機失蹤位置搜尋等。
- 多功能專業飛行資料分析軟體。
- 飛行控制軟體介面自定義LOGO。
技術指標:
|
物理引數 |
輸入/輸出 |
||
|
尺寸 |
:115x65x23mm |
PWM輸出 |
: 6 通道 |
|
重量 |
:120g |
PPM輸出 |
:12 通道 |
|
電氣引數 |
PPM輸入 |
:18 通道 |
|
|
電壓 |
:DC 4V~18V |
功能介面 |
|
|
電流 |
Sin輸入 |
:1 路(18通道) |
|
|
功耗 |
:1.32W |
Sout輸出 |
:1 路(12通道) |
|
系統精度 |
CAN匯流排 |
:1 路(16通道 Aerospace 協議) |
|
|
姿態 |
:俯仰 0.1°/±90°、滾轉 0.1°/±180°、航向 0.3°/±180° |
RS232-1 |
:PC通訊/數傳電臺 |
|
定位 |
:2.5m(絕對精度) |
RS232-2 |
:資料記錄器/模擬 |
|
測量範圍 |
電壓監測 |
:2 路(0~30V) |
|
|
角速度 |
:±300°/s |
轉速監測 |
:2 路 |
|
加速度 |
:±2g / ±8g 雙範圍 |
航線/航點 |
|
|
氣壓高度 |
:-1000m~11000m |
航線 |
:100 條(支援多邊形掃描航線, KML航線) |
|
空速 |
:0~300km/hr、0~500km/hr 可選 |
航點 |
:1000 個/每條航線 |
|
GPS接收機 |
定義 |
:23 個引數/ 18 個任務動作 |
|
|
型號 |
:Ublox MAX-M8Q |
線上地圖 |
|
|
星系 |
:GPS, GLONASS, BeiDou, Galileo |
|
:路線圖、混合圖、衛星圖、地形圖 |
|
重新整理速率 |
:10Hz |
Open Street |
:開放街圖 |
|
使用環境 |
飛行資料記錄器 |
||
|
使用溫度 |
:-25°C~+70°C |
容量/介面 |
:8G/USB/高速/外接 |
飛行控制律組態建模軟體 CCA Constructor
使用者根據控制物件的特性、控制要求和控制目的,使用控制律組態建模軟體按需選擇功能模組,用滑鼠將需要相互關聯的功能模組用連線連線,就構成了結構和流程直觀清晰的系統應用程式。使用者能夠快速方便地從理論設計直接進入到實現開發階段,高效率地完成控制系統的組態建模、系統辨識、動態模擬以及實時系統執行。
飛行控制律設計軟體擁有豐富的通用和專用功能模組資源、靈活強大的組態編輯功能、演算法邏輯校驗、線上除錯執行和嵌入式半物理模擬系統,相容多種通訊協議、支援多種硬體裝置。使用者不需要書寫任何程式程式碼,就能夠完成飛行器所需的各種複雜功能的工程控制演算法設計、除錯和模擬。

A.選單欄 B.快捷工具欄 C.工程視窗 D.物件屬性欄 E.遙測資料視窗 F.組態建模編輯區 G.功能模組視窗 H.內部資訊視窗 I.除錯資訊視窗 J.命令輸入視窗 K.系統狀態視窗 L.資料傳送狀態列
快捷工具欄:

系統狀態視窗:

工程視窗:

遙測資料來源:


功能模組:

功能模組引數設定:


某固定翼飛機完整控制律案例:











任務載荷控制案例:

多旋翼和直升機控制律部分案例:


基於齊格勒—尼科爾斯法則的PID引數整定器:
|
|
|


基於JSBSim飛行動力學模型和FlightGear飛行模擬器組成的半物理模擬系統:

多功能專業飛行資料分析軟體:

系統連線示意圖:

A.GPS天線 B.飛控電源 C.D.舵機 E.SBUS_PPM_PWM轉換器 F.遙控接收機 G.舵機電源 H.轉速感測器 J.CAN匯流排感測器 K.飛行資料記錄器 L.數傳電臺 M.空速管
飛行控制軟體 CCA Control
CCA42飛行控制系統的地面飛行控制軟體支援多種地圖格式和線上地圖,能夠規劃各種複雜的任務航線,可以個性化設定控制和顯示方式、自定義新增控制按鈕和互動視窗、方便靈活 的實時航行控制、視訊畫面疊加功能、以及飛行歷史回放、飛機失蹤位置搜尋等功能。具有適應性廣、通用性強、擴充套件性高、相容性好的使用特點,系統硬體和控制軟體可以一機多用,能夠滿足無人機種類和應用的多樣化要求。
軟體選單:

設定選單:

使用滑鼠右鍵航點選單,設定任務航線的航點引數和航線引數。
航點右鍵選單:

航點引數設定:

航線引數設定:

常規任務航線:(最多可由100條航線組成)

多邊形掃描航線:(最多可由100條航線組成)

多邊形掃描航線設定:

飛行控制介面:

快捷圖示按鈕:

自定義操作按鈕:

失蹤搜尋介面:

飛行歷史回放介面:

全文結束