
模擬退火演算法2
著名的模擬退火演算法,它是一種基於蒙特卡洛思想設計的近似求解最優化問題的方法。
一點歷史——如果你不感興趣,可以跳過
美國物理學家 N.Metropolis 和同仁在1953年發表研究複雜系統、計算其中能量分佈的文章,他們使用蒙特卡羅模擬法計算多分子系統中分子的能量分佈。這相當於是本文所探討之問題的開始,事實上,模擬退火中常常被提到的一個名詞就是Metropolis準則,後面我們還會介紹。
美國IBM公司物理學家 S.Kirkpatrick、C. D. Gelatt 和 M. P. Vecchi 於1983年在《Science》上發表了一篇頗具影響力的文章:《以模擬退火法進行最優化(Optimization by Simulated Annealing)》。他們借用了Metropolis等人的方法探討一種旋轉玻璃態系統(spin glass system)時,發覺其物理系統的能量和一些組合最優(combinatorial optimization)問題(著名的旅行推銷員問題TSP即是一個代表例子)的成本函式相當類似:尋求最低成本即似尋求最低能量。由此,他們發展出以 Metropolis 方法為本的一套演算法,並用其來解決組合問題等的尋求最優解。
幾乎同時,歐洲物理學家 V.Carny 也發表了幾乎相同的成果,但兩者是各自獨立發現的;只是Carny“運氣不佳”,當時沒什麼人注意到他的大作;或許可以說,《Science》雜誌行銷全球,“曝光度”很高,素負盛名,而Carny卻在另外一本發行量很小的專門學術期刊《J.Opt.Theory Appl.》發表其成果因而並未引起應有的關注。
Kirkpatrick等人受到Metropolis等人用蒙特卡羅模擬的啟發而發明了“模擬退火”這個名詞,因為它和物體退火過程相類似。尋找問題的最優解(最值)即類似尋找系統的最低能量。因此係統降溫時,能量也逐漸下降,而同樣意義地,問題的解也“下降”到最值。
一、什麼是退火——物理上的由來
在熱力學上,退火(annealing)現象指物體逐漸降溫的物理現象,溫度愈低,物體的能量狀態會低;夠低後,液體開始冷凝與結晶,在結晶狀態時,系統的能量狀態最低。大自然在緩慢降溫(亦即,退火)時,可“找到”最低能量狀態:結晶。但是,如果過程過急過快,快速降溫(亦稱「淬鍊」,quenching)時,會導致不是最低能態的非晶形。
如下圖所示,首先(左圖)物體處於非晶體狀態。我們將固體加溫至充分高(中圖),再讓其徐徐冷卻,也就退火(右圖)。加溫時,固體內部粒子隨溫升變為無序狀,內能增大,而徐徐冷卻時粒子漸趨有序,在每個溫度都達到平衡態,最後在常溫時達到基態,內能減為最小(此時物體以晶體形態呈現)。
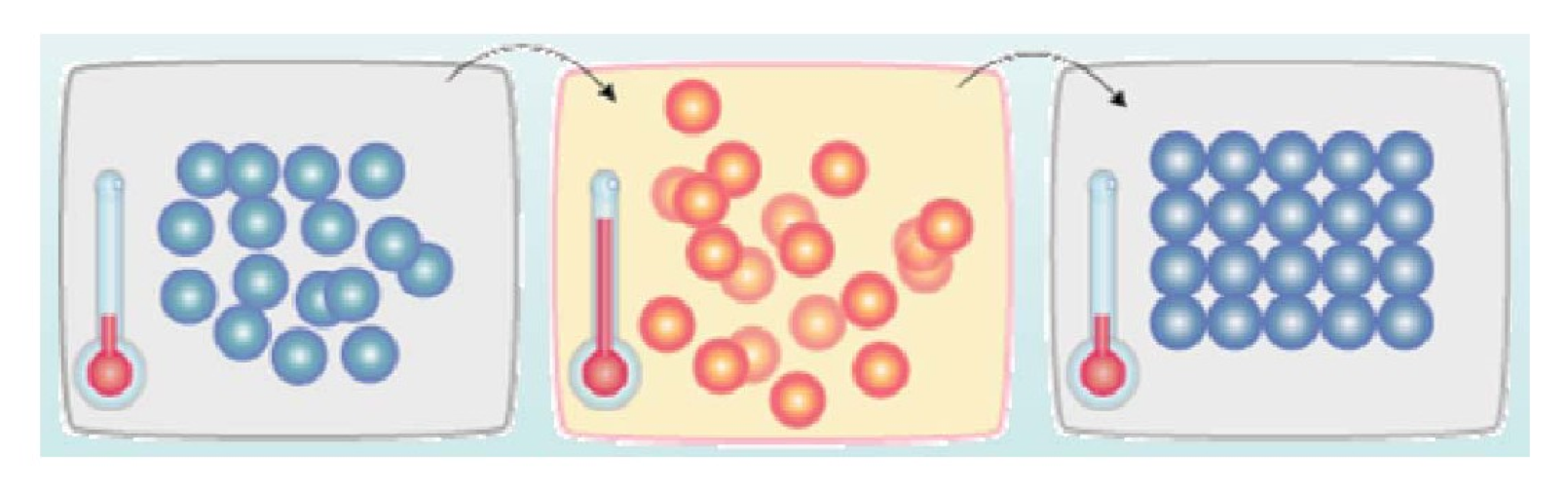
似乎,大自然知道慢工出細活:緩緩降溫,使得物體分子在每一溫度時,能夠有足夠時間找到安頓位置,則逐漸地,到最後可得到最低能態,系統最安穩。
二、模擬退火(Simulate Anneal)
如果你對退火的物理意義還是暈暈的,沒關係我們還有更為簡單的理解方式。想象一下如果我們現在有下面這樣一個函式,現在想求函式的(全域性)最優解。如果採用Greedy策略,那麼從A點開始試探,如果函式值繼續減少,那麼試探過程就會繼續。而當到達點B時,顯然我們的探求過程就結束了(因為無論朝哪個方向努力,結果只會越來越大)。最終我們只能找打一個區域性最後解B。
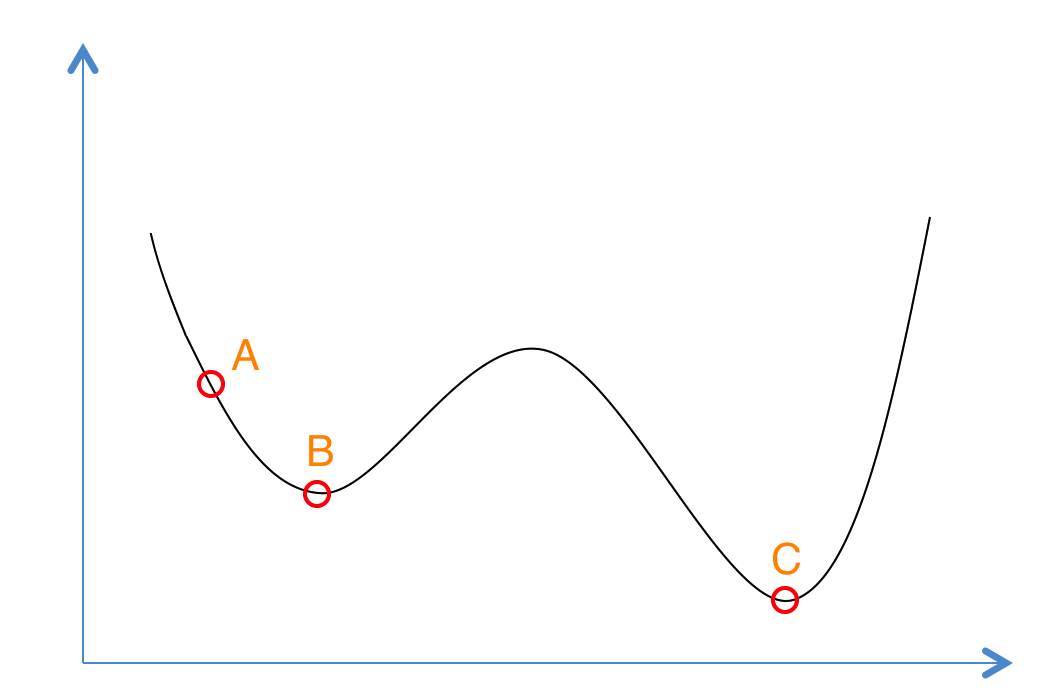
模擬退火其實也是一種Greedy演算法,但是它的搜尋過程引入了隨機因素。模擬退火演算法以一定的概率來接受一個比當前解要差的解,因此有可能會跳出這個區域性的最優解,達到全域性的最優解。以上圖為例,模擬退火演算法在搜尋到區域性最優解B後,會以一定的概率接受向右繼續移動。也許經過幾次這樣的不是區域性最優的移動後會到達B 和C之間的峰點,於是就跳出了局部最小值B。
根據Metropolis準則,粒子在溫度T時趨於平衡的概率為exp(-ΔE/(kT)),其中E為溫度T時的內能,ΔE為其改變數,k為Boltzmann常數。Metropolis準則常表示為

Metropolis準則表明,在溫度為T時,出現能量差為dE的降溫的概率為P(dE),表示為:P(dE) = exp( dE/(kT) )。其中k是一個常數,exp表示自然指數,且dE<0。所以P和T正相關。這條公式就表示:溫度越高,出現一次能量差為dE的降溫的概率就越大;溫度越低,則出現降溫的概率就越小。又由於dE總是小於0(因為退火的過程是溫度逐漸下降的過程),因此dE/kT < 0 ,所以P(dE)的函式取值範圍是(0,1) 。隨著溫度T的降低,P(dE)會逐漸降低。 我們將一次向較差解的移動看做一次溫度跳變過程,我們以概率P(dE)來接受這樣的移動。也就是說,在用固體退火模擬組合優化問題,將內能E模擬為目標函式值 f,溫度T演化成控制引數 t,即得到解組合優化問題的模擬退火演演算法:由初始解 i 和控制引數初值 t 開始,對當前解重複“產生新解→計算目標函式差→接受或丟棄”的迭代,並逐步衰減 t 值,演算法終止時的當前解即為所得近似最優解,這是基於蒙特卡羅迭代求解法的一種啟發式隨機搜尋過程。退火過程由冷卻進度表(Cooling Schedule)控制,包括控制引數的初值 t 及其衰減因子Δt 、每個 t 值時的迭代次數L和停止條件S。
總結起來就是:
- 若f( Y(i+1) ) <= f( Y(i) ) (即移動後得到更優解),則總是接受該移動;
- 若f( Y(i+1) ) > f( Y(i) ) (即移動後的解比當前解要差),則以一定的概率接受移動,而且這個概率隨著時間推移逐漸降低(逐漸降低才能趨向穩定)相當於上圖中,從B移向BC之間的小波峰時,每次右移(即接受一個更糟糕值)的概率在逐漸降低。如果這個坡特別長,那麼很有可能最終我們並不會翻過這個坡。如果它不太長,這很有可能會翻過它,這取決於衰減 t 值的設定。
關於普通Greedy演算法與模擬退火,有一個有趣的比喻:
-
- 普通Greedy演算法:兔子朝著比現在低的地方跳去。它找到了不遠處的最低的山谷。但是這座山谷不一定最低的。這就是普通Greedy演算法,它不能保證區域性最優值就是全域性最優值。
- 模擬退火:兔子喝醉了。它隨機地跳了很長時間。這期間,它可能走向低處,也可能踏入平地。但是,它漸漸清醒了並朝最低的方向跳去。這就是模擬退火。
通過一個例項來程式設計演示模擬退火的執行。特別地,我們這裡所採用的例項是著名的“旅行商問題”(TSP,Traveling Salesman Problem),它是哈密爾頓迴路的一個例項化問題,也是最早被提出的NP問題之一。
TSP是一個最常被用來解釋模擬退火用法的問題,因為這個問題比較有名,我們這裡不贅言重述,下面直接給出C++實現的程式碼:

#include <iostream>
#include <string.h>
#include <stdlib.h>
#include <algorithm>
#include <stdio.h>
#include <time.h>
#include <math.h>
#define N 30 //城市數量
#define T 3000 //初始溫度
#define EPS 1e-8 //終止溫度
#define DELTA 0.98 //溫度衰減率
#define LIMIT 1000 //概率選擇上限
#define OLOOP 20 //外迴圈次數
#define ILOOP 100 //內迴圈次數
using namespace std;
//定義路線結構體
struct Path
{
int citys[N];
double len;
};
//定義城市點座標
struct Point
{
double x, y;
};
Path bestPath; //記錄最優路徑
Point p[N]; //每個城市的座標
double w[N][N]; //兩兩城市之間路徑長度
int nCase; //測試次數
double dist(Point A, Point B)
{
return sqrt((A.x - B.x) * (A.x - B.x) + (A.y - B.y) * (A.y - B.y));
}
void GetDist(Point p[], int n)
{
for(int i = 0; i < n; i++)
for(int j = i + 1; j < n; j++)
w[i][j] = w[j][i] = dist(p[i], p[j]);
}
void Input(Point p[], int &n)
{
scanf("%d", &n);
for(int i = 0; i < n; i++)
scanf("%lf %lf", &p[i].x, &p[i].y);
}
void Init(int n)
{
nCase = 0;
bestPath.len = 0;
for(int i = 0; i < n; i++)
{
bestPath.citys[i] = i;
if(i != n - 1)
{
printf("%d--->", i);
bestPath.len += w[i][i + 1];
}
else
printf("%d\n", i);
}
printf("\nInit path length is : %.3lf\n", bestPath.len);
printf("-----------------------------------\n\n");
}
void Print(Path t, int n)
{
printf("Path is : ");
for(int i = 0; i < n; i++)
{
if(i != n - 1)
printf("%d-->", t.citys[i]);
else
printf("%d\n", t.citys[i]);
}
printf("\nThe path length is : %.3lf\n", t.len);
printf("-----------------------------------\n\n");
}
Path GetNext(Path p, int n)
{
Path ans = p;
int x = (int)(n * (rand() / (RAND_MAX + 1.0)));
int y = (int)(n * (rand() / (RAND_MAX + 1.0)));
while(x == y)
{
x = (int)(n * (rand() / (RAND_MAX + 1.0)));
y = (int)(n * (rand() / (RAND_MAX + 1.0)));
}
swap(ans.citys[x], ans.citys[y]);
ans.len = 0;
for(int i = 0; i < n - 1; i++)
ans.len += w[ans.citys[i]][ans.citys[i + 1]];
cout << "nCase = " << nCase << endl;
Print(ans, n);
nCase++;
return ans;
}
void SA(int n)
{
double t = T;
srand((unsigned)(time(NULL)));
Path curPath = bestPath;
Path newPath = bestPath;
int P_L = 0;
int P_F = 0;
while(1) //外迴圈,主要更新引數t,模擬退火過程
{
for(int i = 0; i < ILOOP; i++) //內迴圈,尋找在一定溫度下的最優值
{
newPath = GetNext(curPath, n);
double dE = newPath.len - curPath.len;
if(dE < 0) //如果找到更優值,直接更新
{
curPath = newPath;
P_L = 0;
P_F = 0;
}
else
{
double rd = rand() / (RAND_MAX + 1.0);
//如果找到比當前更差的解,以一定概率接受該解,並且這個概率會越來越小
if(exp(dE / t) > rd && exp(dE / t) < 1)
curPath = newPath;
P_L++;
}
if(P_L > LIMIT)
{
P_F++;
break;
}
}
if(curPath.len < bestPath.len)
bestPath = curPath;
if(P_F > OLOOP || t < EPS)
break;
t *= DELTA;
}
}
int main(int argc, const char * argv[]) {
freopen("TSP.data", "r", stdin);
int n;
Input(p, n);
GetDist(p, n);
Init(n);
SA(n);
Print(bestPath, n);
printf("Total test times is : %d\n", nCase);
return 0;
}
注意由於是基於蒙特卡洛的方法,所以上面程式碼每次得出的結果並不完全一致。你可以通過增加迭代的次數來獲得一個更優的結果。
我們這裡需要說明的是,在之前的文章裡,我們用求最小值的例子來解釋模擬退火的執行:如果新一輪的計算結果更前一輪之結果更小,那麼我們就接受它,否則就以一個概率來拒絕或接受它,而這個拒絕的概率會隨著溫度的降低(也即是迭代次數的增加)而變大(也就是接受的概率會越來越小)。
但現在我們面對一個TSP問題,我們如何定義或者說如何獲取下一輪將要被考察的哈密爾頓路徑呢?在一元函式最小值的例子中,下一輪就是指向左或者向右移動一小段距離。而在TSP問題中,我們可以採用的方式其實是很多的。上面程式碼中GetNext()函式所採用的方式是隨機交換兩個城市在路徑中的順序。例如當前路徑為 A->B->C->D->A,那麼下一次路徑就可能是A->D->C->B->A,即交換B和D。而在文獻【3】中,作者取樣的程式碼如下(我們擷取一個片段,完整程式碼請參考原文):
public class Tour{
... ...
// Creates a random individual
public void generateIndividual() {
// Loop through all our destination cities and add them to our tour
for (int cityIndex = 0; cityIndex < TourManager.numberOfCities(); cityIndex++) {
setCity(cityIndex, TourManager.getCity(cityIndex));
}
// Randomly reorder the tour
Collections.shuffle(tour);
}
... ...
}可見作者的方法是把上一輪路徑做一個隨機的重排(這顯然也是一種策略)。
TSP.data的資料格式如下,第一行的數字表示一個有多少座城市,第2至最後一行,每行有兩個數字表示,城市的座標(平面直角座標系)。例如: 6 20 80 16 84 23 66 62 90 11 9 35 28 最後請讀者自行編譯執行程式並觀察分析輸出的結果。