
1.PMAC卡-簡介和預備知識
PMAC卡是功能非常強大的運動控制卡,但是網上PMAC的教程很少,僅有的幾個教程還是官網培訓教程,羅列概念和記流水賬,最不喜歡這樣的教程。自己學習PMAC卡的時候走了許多彎路,剛好找完工作就寫一下PMAC的相關教程,看完整個系列的教程,相信對於PMAC的使用是沒有問題的,主要分為以下幾個模組:
- 簡介和預備知識
- PMAC硬體
- PMAC下位機程式設計
- PMAC上位機程式設計
PMAC簡介
PMAC基本上算是自動控制行業中功能最強大的運動控制卡了,雖然價格不菲,但是使用及其方便,功能也極其強大,怎麼強大自己去搜啦,這是官網連結。
PMAC是一系列控制卡的簡稱,常用的有PMAC1、PMAC2、Turbo PMAC1、 Turbo PMAC2、UMAC、Clipper等,基本功能和使用方法是一樣的,這裡我使用的是Turbo PMAC1控制卡。
在國內PMAC有多家代理,筆者固定聯絡的是蘇州均信,維修的話有北京泰道公司,北京泰道公司的官方QQ群號為190220668 ,在群裡面可以提問,有各路大神和官方人員解答疑問,群共享裡面也有許多資料供學習。
運動控制基礎
“工欲善其事,必先利其器”,在本文中還是先說一下運動控制相關理論,這裡只是一些基本概念,深入瞭解還是要自行檢視相關資料。
定義:在複雜條件下將預定的控制方案、規劃指令轉變成期望的機械運動,實現機械運動精確的位置控制、速度控制、加速度(轉矩)的控制。
最簡單的運動控制系統
我們考慮一個最簡單的控制卡-驅動器-電機反饋運動控制系統

控制器:根據要求的參考輸入訊號(如位移、速度、力等),產生相應的控制訊號,這裡對應PMAC控制卡。
執行機構:根據運動控制器發出的控制訊號,產生操作量,作用在被控物件上,帶動被控物件產生相應的運動。運動控制中執行機構通常由電機及其驅動器組成的,其中驅動器提供電機功率,使得電機做旋轉或直線運動。
被控物件:將被操縱的機器裝置稱為被控物件。這裡對應常用旋轉電機運動模組或直線電機模組。
感測器(反饋檢測裝置):對被控物件的過程實際訊號(如實際位移、實際速度、實際力等)進行檢測、轉換為電訊號,經整形、放大提供給控制器,從而對被控物件構成閉環負反饋控制 。常用的感測器有光電編碼器、光柵尺、測速發電機和張力/壓力控制器等。
如上圖,可以看到運動控制系統有反饋檢測裝置,就拿這裡的運動控制系統來說,不使用反饋控制的運動控制系統就叫開環系統,反饋控制的是通過編碼器採集的訊號來反饋的運動控制系統就叫半閉環控制系統(因為此時的被控物件的訊號是間接的方式得到的),反饋控制的是通過光柵尺採集的訊號來反饋的運動控制系統就叫全閉環控制系統。
三環控制
關於三環控制,有一篇比較通俗的文章(原文連結),這裡擷取一段,稍作修改如下:

運動伺服一般都是三環控制系統,從內到外依次是電流環、速度環、位置環,這三環一起構成一個完整的運動控制系統。
1、電流環:電流環的輸入是速度環PID 調節後的輸出,我們稱為“電流環給定”,然後電流環的這個給定和“電流環的反饋”值進行比較後的差值在電流環內做PID 調節輸出給電機,“電流環的輸出”就是電機的每相的相電流,“電流環的反饋”不是編碼器的反饋而是在驅動器內部安裝在每相的霍爾元件(磁場感應變為電流電壓訊號)反饋給電流環的。
2、速度環:速度環的輸入就是位置環PID 調節後的輸出以及位置設定的前饋值,我們稱為“速度設定”,這個“速度設定”和“速度環反饋”值進行比較後的差值在速度環做PID 調節後輸出就是上面講到的“電流環的給定”。速度環的反饋來自於編碼器(光柵尺)的反饋後的值經過“速度運算器”得到的。
3、位置環:位置環的輸入就是外部的脈衝(如在控制卡中輸入的待運動位置指令),外部的脈衝經過平滑濾波處理和電子齒輪計算後作為“位置環的設定”,設定和來自編碼器反饋的脈衝訊號經過偏差計數器的計算後的數值在經過位置環的PID 調節後輸出和位置給定的前饋訊號的合值就構成了上面講的速度環的給定。位置環的反饋也來自於編碼器(光柵尺)。
在上圖中,我標出了三環控制和運動控制系統基本組成的對應關係,可以看到三環控制是把控制器、執行結構、被控物件和反饋檢測細化了,上圖中是一種常用的伺服電機驅動模式——速度控制模式(即電機驅動器包括速度環和電流環),其他的伺服電機驅動模式包括位置控制模式、力矩控制模式等等。
還需要注意的是在每一環的控制中,我們引入了PID控制的概念。
PID控制
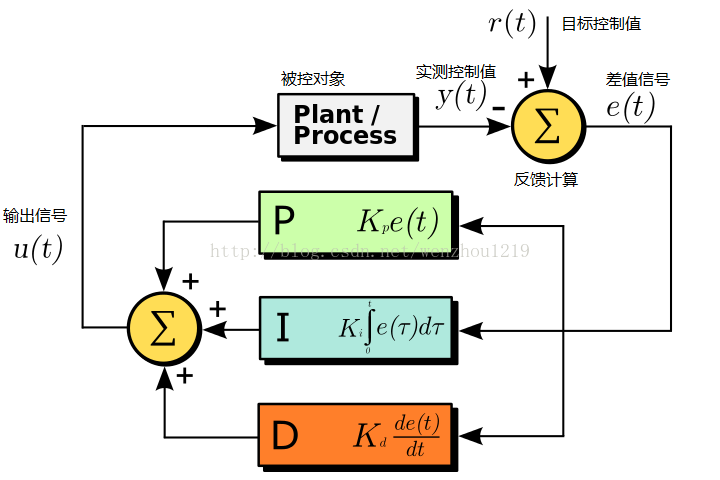
PID是在工業控制中經典的控制演算法,現在仍然被普遍的採用。
當我們知道被控物件目標控制值,和當前被控物件實際測量值,那麼就可以計算出實際控制差值,這就是反饋,那麼拿到這個反饋要如何處理得到輸出訊號給被控物件使得被控物件的實際測量值越來越接近目標控制值呢?這時候就要有一種計算輸出訊號的演算法,這裡就該PID工作了。
PID詳細名稱為:比例-積分-微分控制方式,是一種誤差控制演算法,綜合作用可以使系統更加準確穩定的達到控制的期望。
關於PID演算法的原理和調節策略通俗講解參見這篇文章。
如果想深入研究,參見這篇文章,英文好的好的話也可以參見wiki。
在使用PMAC完成運動控制的時候,調整PID是必不可少的一個環節,一定要對PID原理有基本瞭解和知道PID的調節步驟。