
行為樹(Behavior Tree)實踐–基本概念
通過一個例子來介紹一下行為樹的基本概念,會比較容易理解,看下圖:

這是我們為一個士兵定義的一顆行為樹(可以先不管這些綠圈和紅圈是幹嗎的),首先,可以看到這是一個樹形結構的圖,有根節點,有分支,而且子節點個數可以任意,然後有三個分支,分別是巡邏(Patrol),攻擊(Attack),逃跑(Retreat),這個三個分支可以看成是我們為這個士兵定義的三個大的行為(Behavior),當然,如果有更多的行為,我們可以繼續在根節點中新增新的分支。當我們要決策當前這個士兵要做什麼樣的行為的時候,我們就會自頂向下的,通過一些條件來搜尋這顆樹,最終確定需要做的行為(葉節點),並且執行它,這就是行為樹的基本原理。
值得注意的是,我們標識的三大行為其實並不是真正的決策的結果,它只是一個型別,來幫助我們瞭解這個分支的一些行為是屬於這類的,真正的行為樹的行為都是在葉節點上,一般稱之為行為節點(Action Node),如下圖紅圈表示的

這些葉節點才是我們真正通過行為樹決策出來的結果,如果用我以前提到的那個層次化的AI結構來描述的話,這些行為結果,相當於就是一個個定義好的“請求”(Request),比如移動(Move),無所事事(Idle),射擊(Shoot)等等。所以行為樹是一種決策樹,來幫助我們搜尋到我們想要的某個行為。
行為節點是遊戲相關的,因不同的遊戲,我們需要定義不同的行為節點,但對於某個遊戲來說,在行為樹上行為節點是可以複用的,比如移動,在巡邏的分支上,需要用到,在逃跑分支上,也會用到,這種情況下,我們就可以複用這個節點。行為節點一般分為兩種執行狀態:
- 執行中(Executing):該行為還在處理中
- 完成(Completed):該行為處理完成,成功或者失敗
除了行為節點,其餘一般稱之為控制節點(Control Node),用樹的“學名”的話,就是那些父節點,如下圖綠圈表示

控制節點其實是行為樹的精髓所在,我們要搜尋一個行為,如何搜尋?其實就是通過這些控制節點來定義的,從控制節點上,我們就可以看出整個行為樹的邏輯走向,所以,行為樹的特點之一就是其邏輯的可見性。
我們可以為行為樹定義各種各樣的控制節點(這也是行為樹有意思的地方之一),一般來說,常用的控制節點有以下三種:
- 選擇(Selector):選擇其子節點的某一個執行
- 序列(Sequence):將其所有子節點依次執行,也就是說當前一個返回“完成”狀態後,再執行先一個子節點
- 並行(Parallel):將其所有子節點都執行一遍
用圖來表示的話,就是這樣,依次為選擇,序列和並行

可以看到,控制節點其實就是“控制”其子節點(子節點可以是葉節點,也可以是控制節點,所謂“執行控制節點”,就是執行其定義的控制邏輯)如何被執行,所以,我們可以擴展出很多其他的控制節點,比如迴圈(Loop)等,與行為節點不同的是,控制節點是與遊戲無關的,因為他只負責行為樹邏輯的控制,而不牽涉到任何的遊戲程式碼。如果是作為一個行為樹的庫的話,其中就一定會包含定義好的控制節點庫。
如果我們繼續考察選擇節點,會產生一個問題,如何從子節點中選擇呢?選擇的依據是什麼呢?這裡就要引入另一個概念,一般稱之為前提(Precondition),每一個節點,不管是行為節點還是控制節點,都會包含一個前提的部分,如下圖
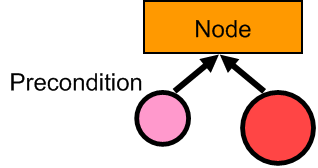
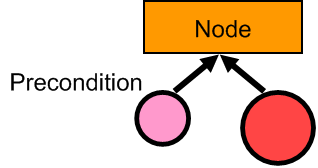
前提就提供了“選擇”的依據,它包含了進入,或者說選擇這個節點的條件,當我們用到選擇節點的時候,它就是去依次測試每一個子節點的前提,如果滿足,則選擇此節點。由於我們最終返回的是某個行為節點(葉節點),所以,當前行為的“總”前提就可以看成是:
當前行為節點的前提 And 父節點的前提 And 父節點的父節點的前提 And….And 根節點的前提(一般是不設,直接返回True)
行為樹就是通過行為節點,控制節點,以及每個節點上的前提,把整個AI的決策邏輯描述了出來,對於每次的Tick,可以用如下的流程來描述:
action = root.FindNextAction(input);
if action is not empty then
action.Execute(request, input) //request是輸出的請求
else
print “no action is available”
從概念上來說,行為樹還是比較簡單的,但對AI程式設計師來說,卻是充滿了吸引力,它的一些特性,比如視覺化的決策邏輯,可複用的控制節點,邏輯和實現的低耦合等,較之傳統的狀態機,都是可以大大幫助我們迅速而便捷的組織我們的行為決策。希望這次簡單的介紹,對大家有所幫助,能力有限,不一定能表述的很清楚,有問題,或者有指教的,都請和我多多交流,最後,我對這個士兵的巡邏分支畫了一個示意圖,供大家參考:
S — 選擇節點 Se — 序列節點

更多案例請關注“思享會Club”公眾號或者關注思享會部落格:http://gkhelp.cn/
