
ROS2GO之TurtleBot學習與使用資料
ROS2GO之TurtleBot學習與使用資料
TurtleBot2最佳環境為indigo或kinetic,TurtleBot3最佳環境為kinetic或melodic。






ROS2GO-Kinetic版本已經配置完全,這裡不在細說,直接使用官網教程學習即可。
ROS2GO-Melodic版本功能包安裝無法使用,使用原始碼編譯即可。
功能包過少,需要自行編譯原始碼。
從github下載如下原始碼進行編譯:

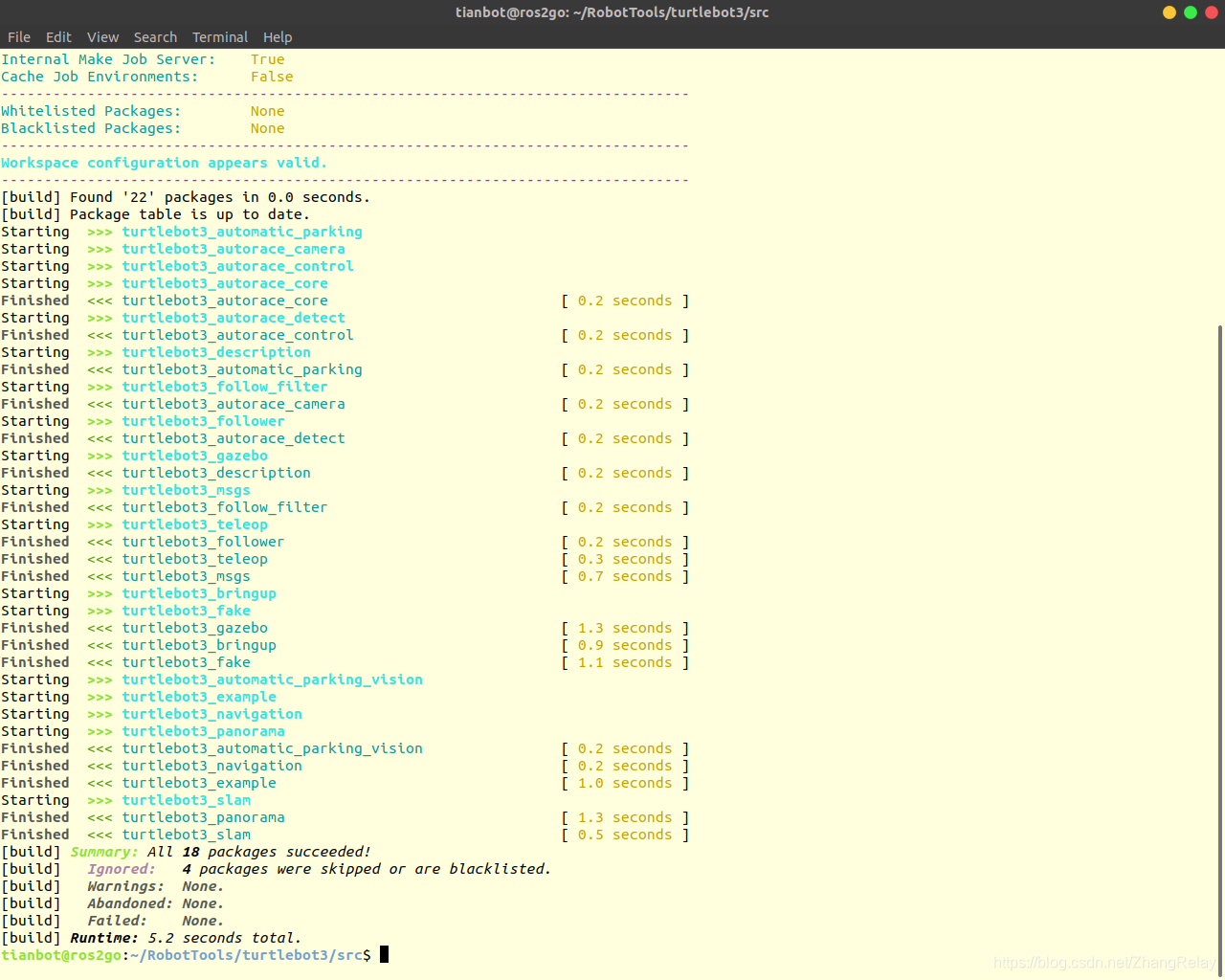
使用catkin build,安裝缺失的依賴使用rosdep install --from-paths . -iy

編譯完成後,更新配置檔案即可使用(source setup.bash)。
測試:
$ roslaunch turtlebot3_gazebo turtlebot3_autorace.launch
$ roslaunch turtlebot3_gazebo turtlebot3_autorace_mission.launch

[email protected]:~$ export GAZEBO_MODE=true
[email protected]:~$ export AUTO_IN_CALIB=action
[email protected]
[email protected]:~$ export AUTO_EX_CALIB=action
[email protected]:~$ export AUTO_DT_CALIB=action
[email protected]:~$ export TURTLEBOT3_MODEL=burger
[email protected]:~$ roslaunch turtlebot3_autorace_core turtlebot3_autorace_core.launch

紅燈停止,等待,綠燈通行。



----
Fin
----