
自動駕駛筆記(四)
阿新 • • 發佈:2018-12-18
1. 規劃簡介
在規劃中,我們結合高精度地圖、定位和預測來構建車輛軌跡。
- 規劃的第一步 是 路線規劃,側重於怎樣從 A 到 B(手機導航系統就是一個例子) 在進行路徑規劃時,將地圖資料作為輸入,並輸出可行駛路徑。
Apollo 使用路徑模組(routing module)處理該任務。 - 規劃的第二步 是軌跡規劃,側重於做出微妙的調整,
以 避開障礙物 併為乘客創造平穩的乘車體驗。
Apollo 使用規劃模組(planning module)處理該任務。
該軌跡由一系列的點定義,每一個點都有關聯速度,和一個指示何時應抵達那個點的時間戳( time stamp )
2. Sebastian
你知道如何去 感知、如何去預測,現在你將學到如何去 規劃(planning)
做出決策(decision)很難,但也很誘人(fascinating),同時你也會收穫很多(rewarding)
我們將在兩種不同的背景下討論 規劃:
- 一個是你想去的地方,也就是一個象徵性的城市,計算一下花多少時間能到那裡。
- 另一個是 運動軌跡水平上的規劃,你決定執行某個特定操作時,汽車該採取何種轉向,這曲線不僅僅是空間曲線,也是時間曲線,你得考慮快或慢或者多快、多慢。
3. 路徑規劃
路徑規劃的目的:就是為了從地圖上 找到A到B的 最佳路徑。
路徑規劃模組 使用了三個輸入:
- 地圖
Apollo 提供的地圖資料包括 公路網 和實時交通訊息 - A:我們當前在地圖上的位置
- B:我們的目的地(取決於車內的乘客)
4.從 地圖 到 圖(Graph 資料結構)
當人們試圖從地圖上 找到 從A到B的路徑時,
我們通常沿著道路追蹤,以檢視是否存在 通往目的地的任何路徑。
這叫做 搜尋。
類似地,Apollo 也使用搜尋來查詢路線,
不同之處在於:
在開始搜尋之前,Apollo 將地圖轉換成了圖,以便使用更智慧的搜尋演算法。
轉換方法:
將 地圖資料 重新格式化為 資料結構——圖
圖 由 節點(node)和 邊(緣)(edge)組成。
此處,節點 代表 路段,而 邊 代表了 路段之間的連線。
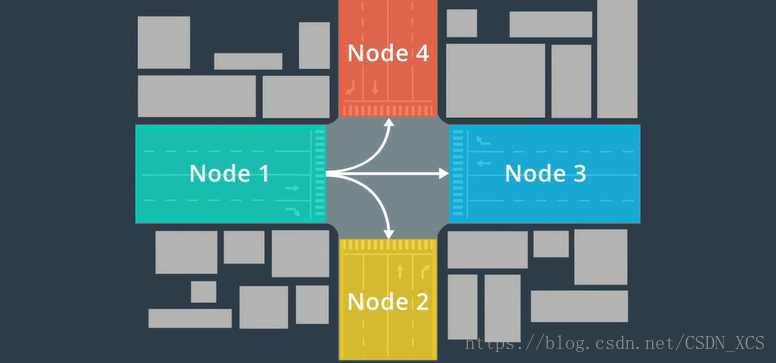
考慮實際,我們也可以對 一個節點移動到 另一個節點的成本進行建模。
例如:現實中,左轉彎 比 右轉彎更加費勁!所以從 Node1到Node4的成本 高於到Node2的成本。
一旦轉換為 圖,就可以應用現在計算機領域中,已經存在的各種在圖中查詢路徑的快速演算法。
最後,將在圖中找到的路徑,映射回地圖中即可。