目標檢測之SSD
阿新 • • 發佈:2018-12-19
文章目錄
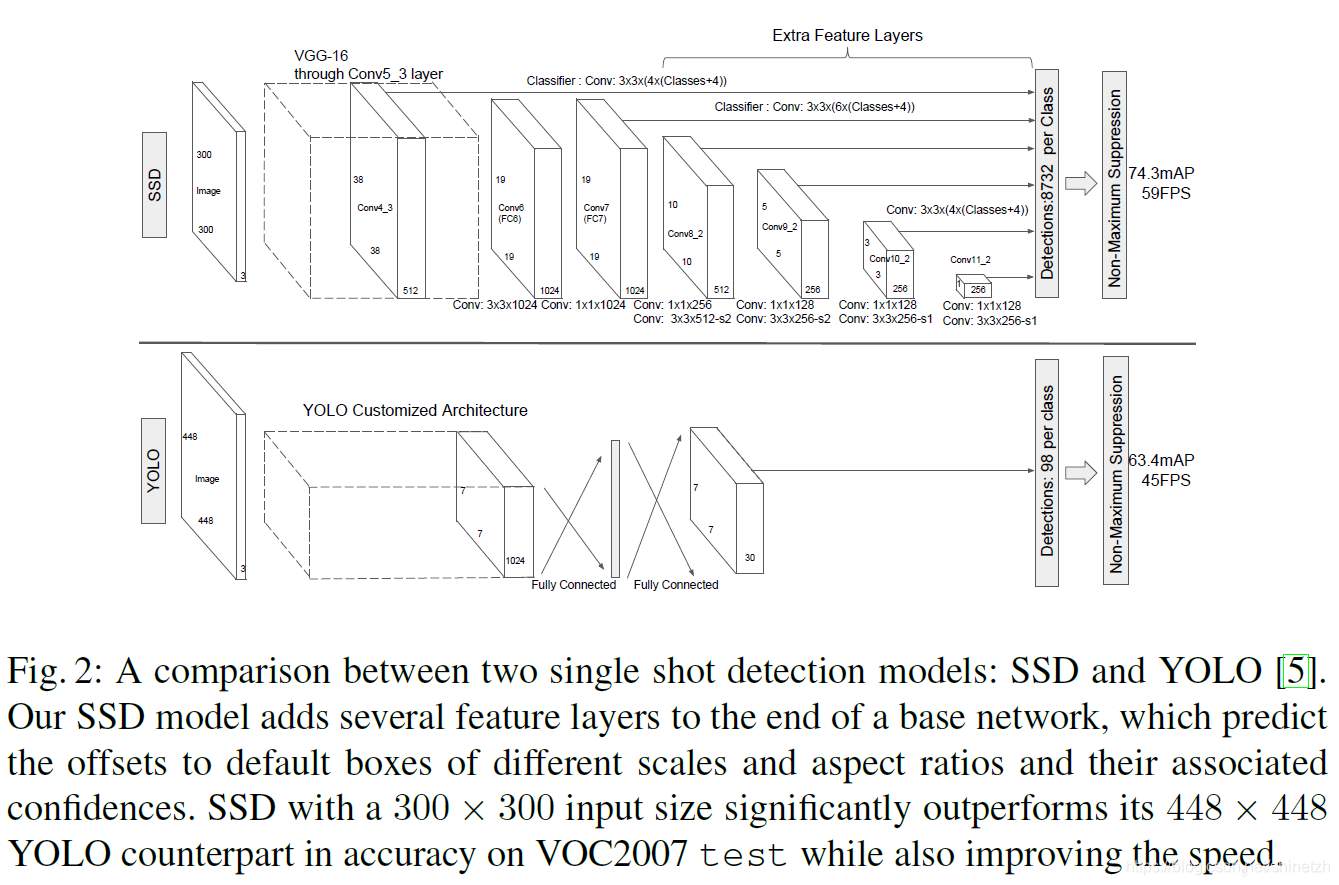
網路結構
改進點
相對於two-stage的目標檢測方法faster R-CNN
- 去掉了檢測框的提出和後面針對提出的不同的檢測框進行特徵取樣的過程,提高了速度。但是借鑑了RPN(region proposal net)的過程。
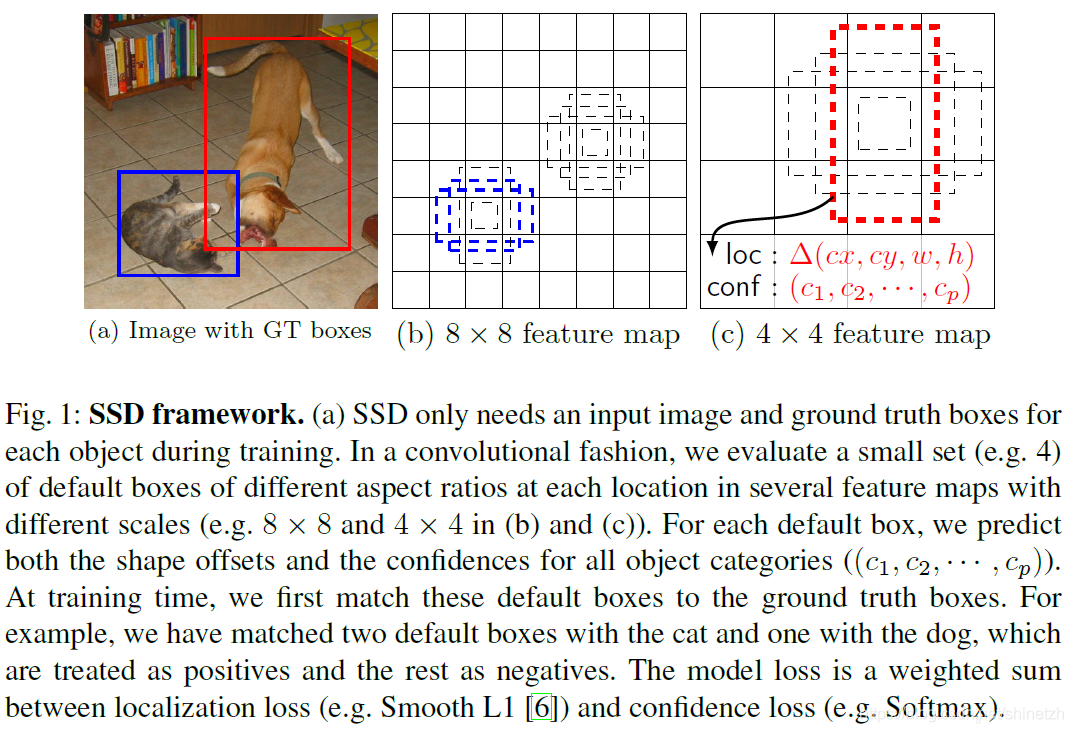
- 在faster R-CNN中的RPN中採用滑動視窗的方法來得到region proposal,在SSD中採用和YOLO類似的方法,每一個特徵圖固定的每一塊給出6個或者4個預選框(具體哪一個layer是6或者4可以參考論文)
相對於one-stage的目標檢測方法YOLO
- 使用不同層的不同尺度的特徵圖學習檢測框,解決YOLO的小物體檢測效果不好的問題,提高了mAP。
- YOLO採用FC來得到檢測框位置和檢測框位置,而SSD採用卷積來計算得到檢測框的位置以及檢測框置信度,一個卷積核對整個特徵圖卷積可以得到一個檢測框四個位置中的一個值,或者一個檢測框屬於某一個類別的置信度。例如一個特徵圖有mn塊,一共有c個類別,那麼需要的的卷積核的數量為mn*(4+c)。
不同改進點對模型的影響
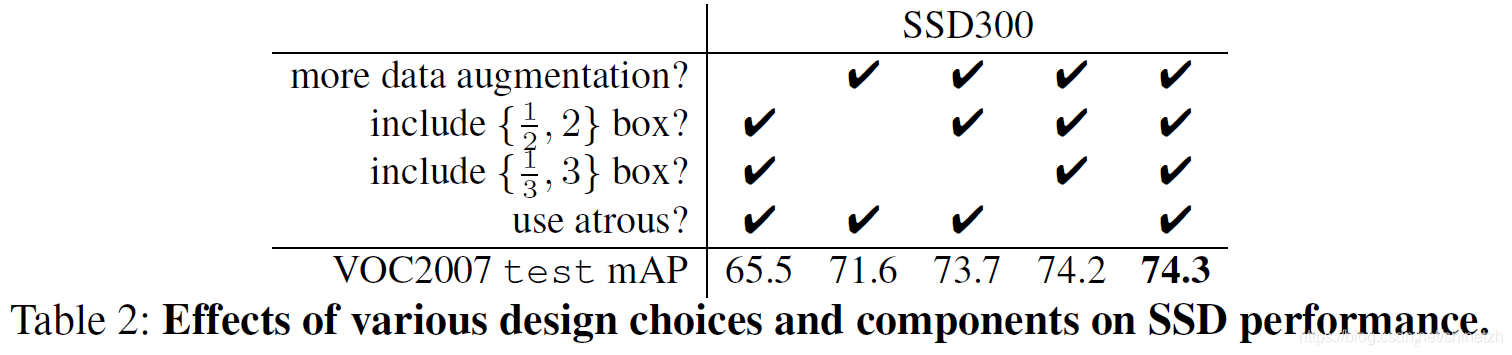
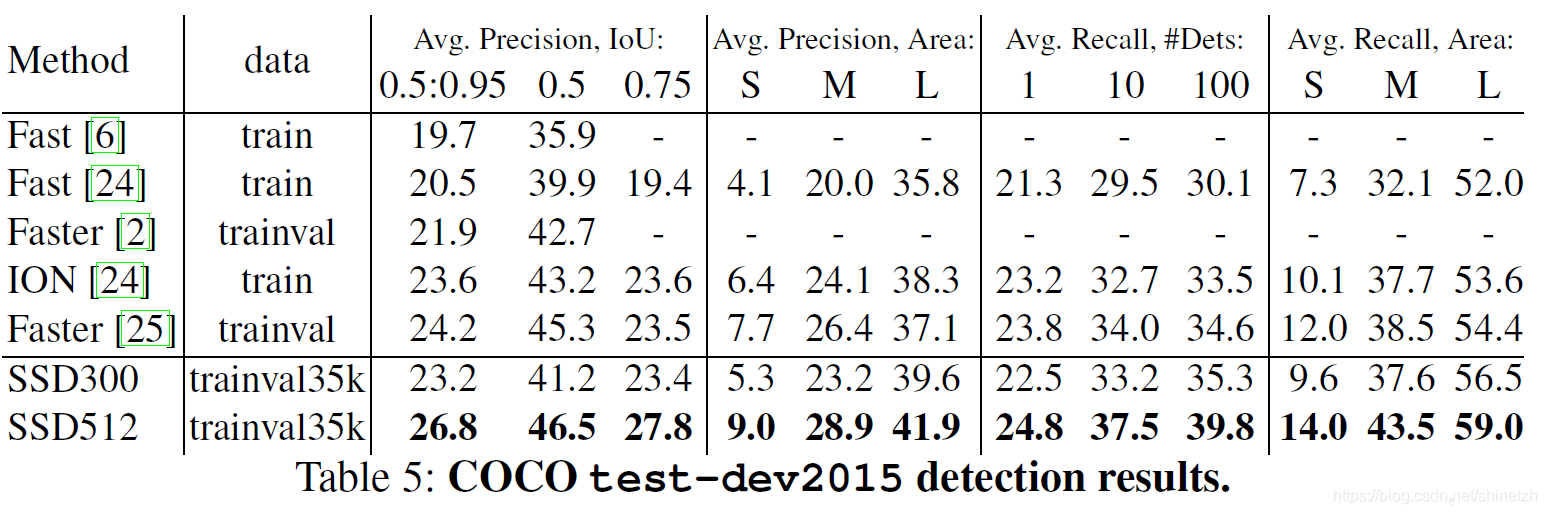
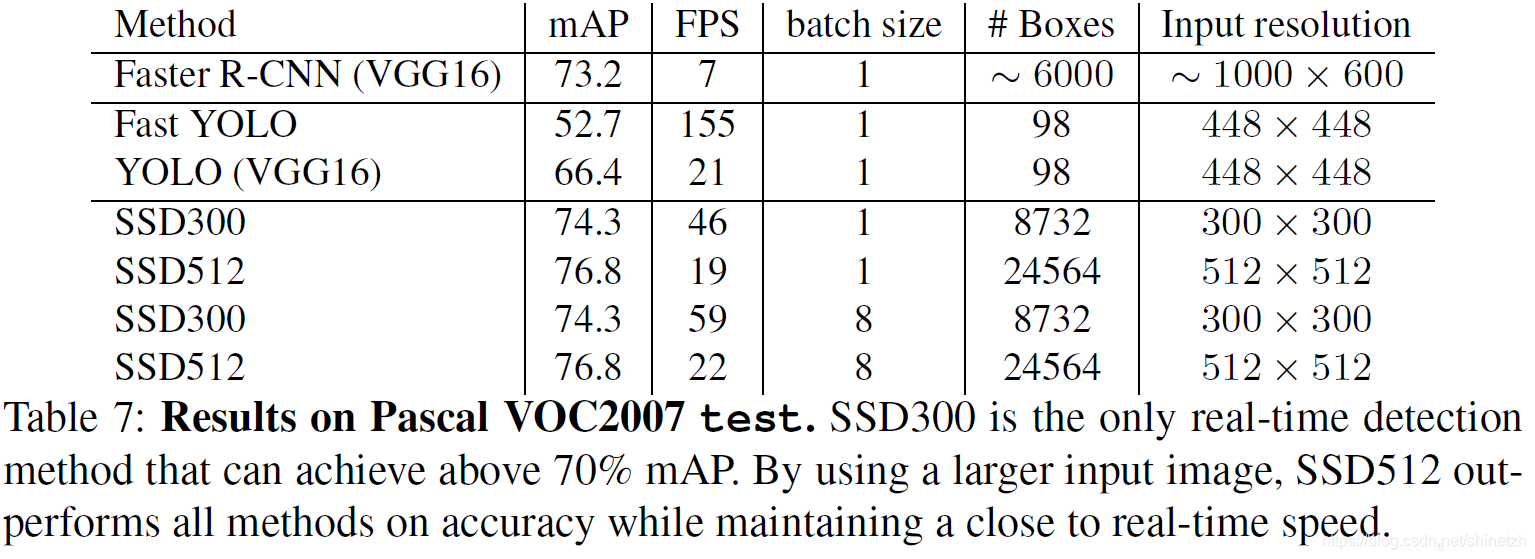
SSD效能