
中科創達孫力:不迷信 AI 演算法,智慧視覺如何轉型升級?

作者 | 若名
出品 | AI科技大本營
近日,中科創達副總裁孫力在 Thunder World 2018 嵌入式 AI 人工智慧技術大會上發表了主題演講,主要分享了以下三方面內容:
-
視覺的傳統技術和挑戰
-
嵌入式視覺+AI=智慧視覺
-
智慧視覺賦能行業的智慧化升級轉型
視覺的傳統技術和挑戰
以手機相機為例,孫力講述了其視覺系統的複雜性。無論是底層驅動、核心演算法的曝光、對焦,到最後視訊處理,相機的系統架構異常複雜。如果要做一個優秀的影象處理系統,面臨攝像頭模組的光學特性、圖象處理的演算法、晶片加速、畫質調優等各方面的挑戰。
另一大麻煩是硬體碎片化,不同的作業系統要對畫質做一些複雜的調優流程(實驗室和實際生活場景),此外需善用硬體加速,解決功耗和效能問題。
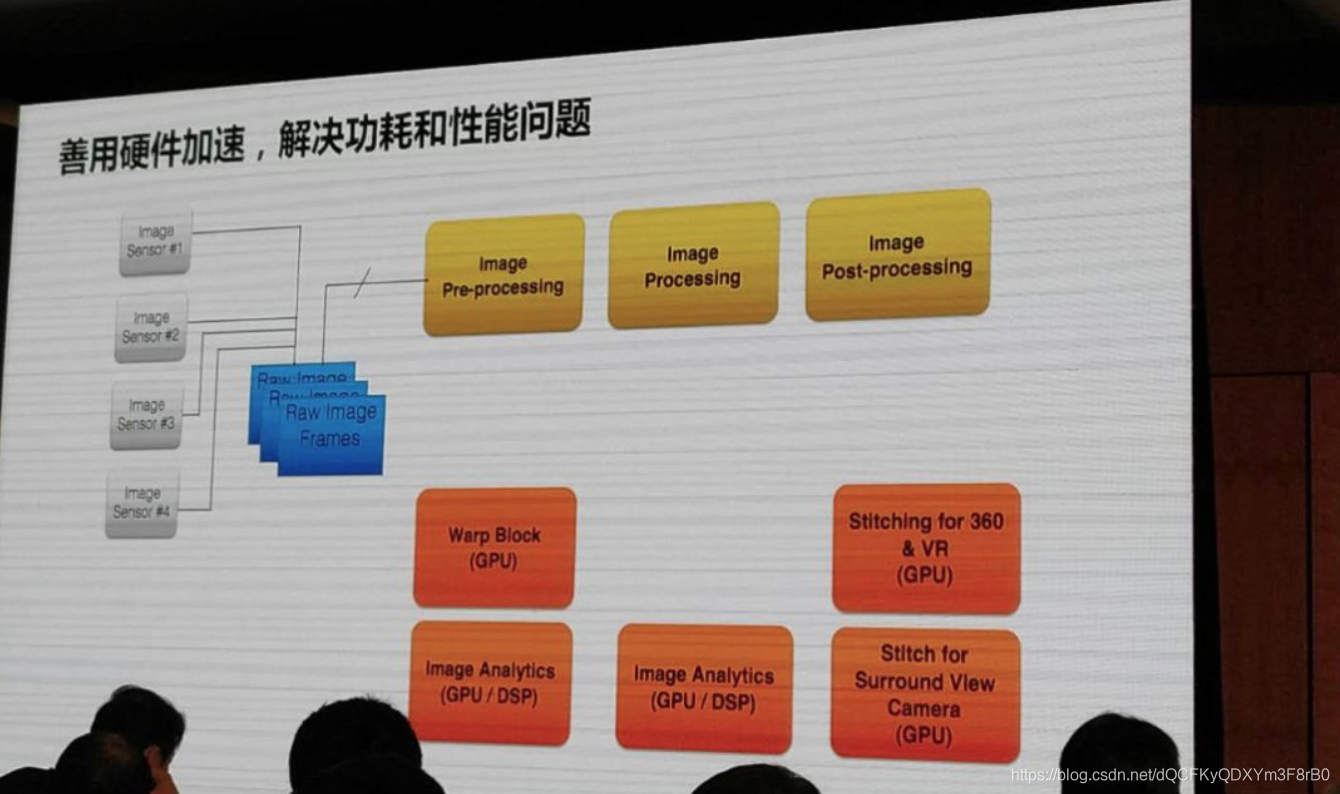
中科創達在畫質調優方面的競爭力是除錯整個影象的 Pipeline 和 3A ,包括亮度、白平衡、對比度要精準對焦,不斷進行除錯,做大量畫質的調優,以產生最優影象採集。除錯過程分成三個階段:第一,先把基礎的軟體、驅動做好;第二,實驗室 tuning,包含 LSC, AWB, AE, Gamma, 對比度增強, CCM, DPC 等等;第三,真實場景 tuning,與參考裝置對比拍攝。
他以汽車 ADAS 晶片為例講述了要滿足高畫質要求可能達到的技術趨勢,首先是從外接的 ISP,到 Bayer sensor 的轉變,目前主流的方案是用外接的 ISP,但在汽車裡會經歷類似於手機從功能機到智慧機的演變。孫力稱,在自動駕駛晶片的影象處理部分中科創達已有一定佈局。
嵌入式 AI 演算法應用的挑戰
目前很多演算法都基於 2D 技術,但3D 技術會越來越普及。孫力指出,這主要取決於以下四個問題的解決:BOM 的成本,由於規模化的問題,還沒有降低到平民化;其次,多種的光學設計,碎片化(ToF、結構光、雙目、主動雙目等);嵌入式的 SoC 的 depth map 的運算能力(pc 輔助到嵌入式 ARM based);多套使用的完整建模問題;RGBD,基於 3D 的人工智慧學術進展。中科創達要解決的是影象質量問題,比如寬動態/HDR、降噪,匯入 AI 技術來解決影象質量問題。
嵌入式 AI 演算法挑戰主要在哪兒?孫力給出了三點:計算資源有限,終端處理平臺碎片化;另外應用場景和需求多樣化,準確率、速度等方面也需要做出取捨。
具體的優化策略是什麼?在他看來,最重要的還是要做深度結合的系統化設計。硬體上,在滿足功耗、發熱等限制條件的前提下,實現 AI 運算加速引擎,其次是 DSP/GPU/NPU 等晶片的加速,同時要與晶片平臺進行深度合作。
而軟體方面,最核心的是降低演算法模型的計算量,這需要設計適合的嵌入式平臺的模型架構,裁剪模型,與場景的深度整合和適配優化以及共享深度學習模型中的超引數。
大會現場,中科創達展示了基於驍龍 845 晶片的終端智慧分析盒子 AI Kit。
智慧視覺賦能行業的智慧化升級轉型
從智慧視覺賦能行業方面,他的感受有三點:第一,客戶一定期望有一個整體解決方案,而不只是 AI。在整個過程中要幫客戶考慮資料獲取、資料隱私、訓練、私有云部署、生產管理系統等等。
第二,客戶衡量 AI 的價值不是多麼高大上,而是根據生產力提升,執行效率優化,及經營業績能承受的預算能力來進行反推,這和目前昂貴的 AI 投入成本是個矛盾。
第三,行業客戶的工作流程,部門職能等還未能圍繞先進生產力來進行部署和優化,客戶期望一次性投入建設一個人工智慧平臺,可以一勞永逸否認自我訓練,升級和部署,對比於現在需要定製化的演算法,未來圍繞需要解決的領域問題,少數的人力服務於演算法的流程需要被建立。
最後,孫力再次強調,要給客戶提供整體解決方案,要從 AI 模型的構建到整個生命週期管理起來,而不僅是提供演算法。另外,他表示不能太迷信 AI 演算法,有時還要用傳統圖象處理演算法,最終的目的是幫客戶解決問題。