
在D-H引數法裡為什麼只用四個引數就能完全定義一個具有6自由度的座標系
在一個三維空間裡,我們知道要表徵一個完全自由的座標系共需要6個自由度:
- 三個用來表徵姿態(orientation)roll-pitch-yaw
- 三個用來表徵位置(position) x-y-z
如此來說,對於一個有n個連桿的機械臂,要描述每個連桿的位姿(位置+姿態)應該要6個引數才對,那麼要描述整個機械臂就需要6n個引數,可為什麼DH引數法裡面每根連桿只用了四個就描述完全了?
這是因為我們在按照DH引數法定義座標系的時候,潛移默化的默認了兩個限制條件。我們看下圖a,b,c這三個座標系
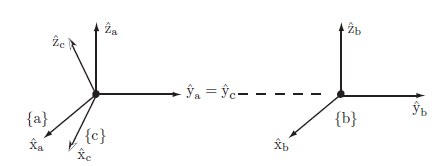
a經過繞y軸的旋轉變成c,c經過y軸方向上的平移成為b。現在嘗試一下用我們所學的D-H法描述b和c座標系看看?
描述不出來
不光這兩個轉換描述不出來,任何繞y軸的旋轉和沿著y軸的平移的組合都沒辦法用DH方法描述。
提取出核心條件描述就是:
- 條件一:下一個座標系的x軸必須垂直於上一個座標系的z軸
- 條件二:下一個座標系的x軸必須與上一個座標系的z軸相交
正是因為這兩個限制條件決定了我們可以只用4個引數完全描述新的座標系。現在你可以放心大膽的使用DH法了
相關推薦
在D-H引數法裡為什麼只用四個引數就能完全定義一個具有6自由度的座標系
在一個三維空間裡,我們知道要表徵一個完全自由的座標系共需要6個自由度: 三個用來表徵姿態(orientation)roll-pitch-yaw 三個用來表徵位置(position) x-y-z 如此來說,對於一個有n個連桿的機械臂,要描述每個連桿的位姿(位置+姿態
對話李笑來:區塊鏈世界裡老實做個好人就能賺很多錢
“我不認為所謂的‘割韭菜’是這個世界裡賺錢最好的方式,效率很低且壞,我認為這個世界有更高效的賺錢方式。” 區塊鏈的核心遊戲規則,到底是價值投資還是投機收割?這個問題在區塊鏈世界裡就像“房間裡的大象”,人人關心,卻很難放到檯面上如實討論。 近日流出的錄音事件打
css中margin標記可以帶一個、二個、三個、四個引數,各有不同的含義
在css中使用margin可以將margin-top,margin-right,margin-bottom,margin-left,縮寫為一個標記,順序為上右下左(順時針)。帶不同的引數具有不同的含義,
A、B、C、D四個字母,能組成多少個互不相同且無重複三位組合
package 第五天的作業;/* * A、B、C、D四個字母,能組成多少個互不相同且無重複三位組合 */public class Demo14 { public static void main(String[] args) { int count = 0; //統計個數 for(int i = 65; i
android開發 BaseAdapter中getView()裡的3個引數的含義
int position位置,一般BaseAdapter都是很多型別一樣的資料展示在介面,該屬性是判斷顯示在介面上的是第幾個,通過position在BaseAdapter自定義的陣列或者集合中取值。並展示在介面上。 View converView 展示在介面上的一個item
UNIX環境程式設計學習筆記------程式設計例項-----對於 函式 inet_ntop()函式的第四個引數的理解
對於 函式 inet_ntop()函式的第四個引數的理解 1.函式原型:#include <arpa/inet.h> const char *inet_ntop(int af, const void *src,char *dst, socklen
自定義View中,四個引數的建構函式,其最後兩個引數的含義
先看兩個引數的建構函式: public View(Context context, @Nullable AttributeSet attrs) { this(context, attrs, 0); }public View(Context conte
python解碼(decode)的四個引數以及如何使用二進位制碼和字元之間的轉換
有些字形無法在編輯器中顯示,或是不想被人看到,可以直接使用二進位制程式碼。 print("\u0394") #要大寫print("\U00000394") #使用名字print("\N{greek capital letter delta}") 解碼的四個引數,特別是出現
學JAVA程式設計要長時間,零基礎四個月真能學會程式設計嗎
自從李彥巨集在2018百度世界大會上釋出了一個個高科技,從海淀公園裡智慧跑道,無人駕駛、小度智慧涼亭、AI教太極等等,無一不引爆整個科技圈,智慧化時代已經真真切切在我們身邊由此產生的連鎖反應,就是程式設計師便再一次推到了風口浪尖,讓人們對JAVA程式設計有了一個更深刻的認識,無論是在校學生還是在職員工,紛
java經典題丨有1、2、3、4四個數字,能組成多少個互不相同且無重複數字的三位數?都是多少?
組合成三個互不重複的數字,不難理解,其他的好辦,但是互不重複,就有點難度了,這個是解決本題思路的重點,程式碼如下: public static void main(String[] args) { int x=0,y=0,z=0,count=0; for(x=1;x<=4;
ibatis/mybatis出現 sql 語句 where in(引數1,引數2……引數1000) 超過1000個引數時候的解決方案
公司專案出現bug,查詢後是由於sql 語句in()內參數查過1000引起的 由於專案比較大,無法輕易修改或重構。 公司框架比較老用了ibates 無法從xml配置裡進行修改。所以本人寫了段程式碼
python匿名函式,有引數時,無引數時,返回多個引數時
lambda lambda 形參:返回式子 演練 應用場景 它和其它函式一起使用,一般不會獨立使用 特點 匿名函式不應該有複雜的邏輯,比如不應有if判斷,但可以有判斷的函式如startswith等。(或者使用三元表示式)。 匿函的核心是,冒號的右邊應該是
修改itoa函式,使得該函式可以接受三個引數。其中第三個引數為最小字元寬度。
#include <stdio.h> #include <limits.h> void itoa(int n, char s[], int width); void reverse(char s[]); int main(void)
15_由1、2、3、4四個數字,能組成多少個互不相同且一個數字中無重複數字的三位數?
package exercise; /** * 題目:有1、2、3、4四個數字,能組成多少個互不相同且一個數字中無重複數字的三位數?並把他們都輸入。 * @author lsq * */ public class Lianxi15 { public static
一個jar包裡有多個main,指定執行某一個main
如果一個jar中含有多個主程式,而你沒有配置預設主程式,或者想要執行指定主程式,則可以通過如下命令執行:java -cp example03-1.0-SNAPSHOT.jar com.alan.HelloWorld-cp <目錄和 zip/jar 檔案的類搜尋路徑>
Js:消息彈出框、獲取時間區間、時間格式、easyui datebox 自定義校驗、表單數據轉化json、控制兩個日期不能只填一個
gets pri ESS 大於等於 轉化 gpo 現在 undefine parent (function ($) { $.messageBox = function (message) { $.messager.show({
全球積分寶:幣圈換個姿勢就能高潮嗎?
mark 誰知 images .com 到手 http 51cto 虛擬貨幣 而是 最近,整個幣圈的行情並不好。大多數韭菜紛紛離場,很多電報群以及×××群一片死寂,失去了往日的喧囂。大多數的項目一直下跌,新發幣將近100%的破發、、、幣圈到底是怎麽了? 當然,這裏面有監管的
幾個月就能化身為數據科學家?
中間 三角形 nts 經濟 問題 想要 app andrew 消失 關於做一名數據科學家,我有一些想法。成為一名數據科學家並不容易,需要付出很多努力,但如果你對數據科學充滿興趣,那一切都是值得的。 時常有人問我:如何成為一名數據科學家?必修的課程是什麽?需要多長時間?你是怎
H5解析 | 3個套路就能製作如此火爆的“一鏡到底”H5
一鏡到底形式的H5是現在很受歡迎的一種營銷玩法,通常是在h5頁面中通過模仿鏡頭的拉伸,使得不同的畫面元素陸續呈現在觀眾眼前的一種表現方式。在H5頁面不剪,畫面不切的情況下,做到一氣呵成的瀏覽效果。對
手機簡訊刪除了怎麼恢復?幾個方法就能恢復
手機簡訊刪除了怎麼恢復?前幾天有個小夥伴收到了一條來著面試的通知,這個面試對他很重要,但是可氣的是剛好在清理手機裡面的垃圾簡訊