
OpenCv-C++-Harr特徵(原理)
**
Harr特徵介紹(Harr Like Feature)
**
1、高類間變異性
每個特徵之間差別很大
2、低類內變異性
每個特徵之間差別很小,幾乎能夠達到吻合的狀態
3、區域性強度差
基於區域性強度差做檢測(可以理解成對比度)
4、不同尺度
多層多尺度,建立多尺度的Harr特徵,如22,44,8*8視窗等等。
5、計算效率高
好比積分影象的操作,它只跟積分影象的特定區域有關,不會隨著視窗大小的變化而變換,效率比較穩定。
Harr標準幾何:

擴充套件幾何:

有這麼多內容,那麼我們思考,計算Harr特徵時是不是特別複雜?這時積分圖就發揮作用了。
如果計算完了,還有一點重要的,因為“黑白”兩塊的差值肯定不一樣,所以光照對影象的影響還沒有消除。

歸一化操作:
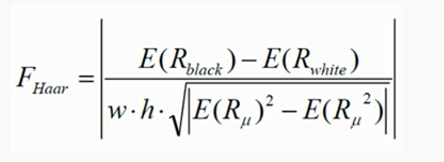
歸一化之後,就可以做匹配、檢測… …
檢測識別需要保證尺度不變性、光照不變性、旋轉不變性

相關推薦
OpenCv-C++-Harr特徵(原理)
** Harr特徵介紹(Harr Like Feature) ** 1、高類間變異性 每個特徵之間差別很大 2、低類內變異性 每個特徵之間差別很小,幾乎能夠達到吻合的狀態 3、區域性強度差 基於區域性強度差做檢測(可以理解成對比度) 4、不同尺度 多層多尺度,建立多尺度的Harr特徵
OpenCv-C++-HOG特徵檢測演算法
HOG主要是用來做行人檢測的,HOG方法是基於對稠密網格中歸一化的區域性方向梯度直方圖的計算。此方法的基本觀點是:區域性目標的外表和形狀可以被區域性梯度或邊緣方向的分佈很好的描述,即使我們不知道對應的梯度和邊緣的位置。在實際操作中,將影象分為小的元胞(cells),在每個元胞內累加計算出一維
OpenCv-C++-SIFT特徵檢測
引用及參考部落格:https://blog.csdn.net/lyl771857509/article/details/79675137 1、SIFT綜述 尺度不變特徵轉換(Scale-invariant feature transform或SIFT)是一種電腦視覺的演算法用來偵測與描述影像
OpenCv-C++-SURF特徵檢測
SURF採用的是Hessian矩陣(SURF演算法核心)行列式近似值影象。SURF(加速版的具有魯棒性的特徵,SpeededUp Robust Features),SURF是尺度不變特徵變換演算法(SIFT演算法)的加速版。SURF最大的特徵在於採用了harr特徵以及積分影象的概念。 而He
OpenCv-C++-LBP特徵檢測
什麼是LBP?它是一種用來描述影象區域性紋理特徵的運算元,英文叫做“Local Binary Pattern”,區域性二值模式。 它具有旋轉不變性,灰度不變性和光照強度不變性等優點。特別是光照強度不變性這一點,如果一張圖片在光照很強的畫面裡特徵物體根本無法識別,LBP就能很好的檢測到物體
OpenCv-C++-ORB特徵檢測與匹配
影象的特徵點可以簡單的理解為影象中比較顯著顯著的點,如輪廓點,較暗區域中的亮點,較亮區域中的暗點等。 ORB的全稱是ORiented Brief,採用FAST(features from accelerated segment test)演算法來檢測特徵點。 與Brisk,AKAZE
OpenCv-C++-BRISK特徵檢測與匹配
BRISK:Binary Robust Invariant Scalable Keypoints。它是一種二進位制的特徵描述運算元。它具有較好的旋轉不變性、尺度不變性,較好的魯棒性等。在對有較大模糊的影象配準時,BRISK演算法在其中表現最為出色。 演算法原理參考下面這篇文章,其中的表達
OpenCv-C++-FLANN特徵匹配演算法
FLANN(快速最近鄰逼近搜尋函式庫),它是一個演算法庫,包含一系列演算法庫,OpenCv中集成了FLANN的一部分匹配演算法,主要對高維資料搜尋比較快。 相比於上一篇的暴力匹配演算法,FLANN更加精確,不會有過多的描述特徵匹配到。 匹配基本步驟: 檢測->提取->計算得到描述
用OpenCV顯示HOG特徵圖的C++程式碼
https://blog.csdn.net/sinat_31135199/article/details/53470879 #include <opencv2/opencv.hpp> #include <cstdio> #include <cstdlib&
LBP特徵原理及C實現
LBP(Local Binary Pattern, 區域性二值特徵)是一種用來描述影象區域性紋理特徵的運算元,它具有旋轉不變性和灰度不變性,同時該特徵對光照不敏感。該特徵對姿態和表情的魯棒性不強。 LBP特徵在人臉識別和目標檢測中常用。 1、原始LBP特徵描述及計算方法 原始的LBP運
OpenCv-C++-KAZE(AKAZE)區域性特徵匹配(二)
上一篇已經做出了KAZE(AKAZE)區域性特徵的檢測,就差匹配沒有做到。 那麼,現在來實現一下: 放上程式碼: #include<opencv2/opencv.hpp> #include<iostream> #include<math.h> u
OpenCv-C++-KAZE(AKAZE)區域性特徵檢測(一)
KAZE與AKAZE都是OpenCv中整合的API演算法,AKAZE是KAZE的加速版本(A表示Accelerated(加速的))。且AKAZE的執行效率要優於KAZE。 與SURF和SIFT不同(基於線性),KAZE(AKAZE)是基於非線性插值的方法,這一點在影象處理方面來說確實比SUR
OpenCv-C++-平面物件識別(接FLANN特徵匹配)
本文接著上篇FLANN特徵匹配,從上篇可以知道,如果特徵匹配時全部是用線進行匹配,那麼真的讓人看著很窩心。那麼,可不可以把匹配到的結果用矩形或圓表示出來呢?當然可以,這就是平面物件識別。是上一章節的更進一步。這裡主要用到兩個新的API: 1、findHomography() ------&g
OpenCv-C++-特徵描述子(BruteForce(暴力匹配))
本片文主要是通過BFMatcher()來進行特徵匹配,暴力匹配就是在一個數組或連結串列裡面進行一一查詢,迴圈匹配。如下圖: 通過SURF運算元分別找到兩張影象的特徵點,再使用BFMatcher函式對兩張影象上的特徵點進行一一檢測和計算,最後通過drawMatches函式繪製兩張影象之間
Python-OpenCV人臉檢測---直接呼叫訓練好的Harr特徵
人臉檢測 定義人臉檢測函式detectFaces(),檢測圖片中所有出現的人臉,並返回人臉的矩形座標(矩形左上、右下頂點座標)。使用上面提到的xml檔案(haar特徵),haarcascades目錄下有好幾個是關於人臉檢測的檔案,這裡選擇haarcascade_frontalface_default.
1.C#.Net編譯原理
標識 執行c 內容 exe 機器 inter 系統 運算 執行 1. C#中的幾種後綴名含義: .Sln //解決方案文件→.csproj //項目文件→.cs //類文件。他們是層層包含的關系。 2. 命名空間: 命名空間是.NET中提供 應用程序代碼容器的方式,
編碼原則實例------c++程序設計原理與實踐(進階篇)
組類型 運算 奇怪 head 不能 gui 簡單的 版本 布局 編碼原則: 一般原則 預處理原則 命名和布局原則 類原則 函數和表達式原則 硬實時原則 關鍵系統原則 (硬實時原則、關鍵系統原則僅用於硬實時和關鍵系統程序設計) (嚴格原則都用一個大寫字母R及其編號標識,而
有符號數和無符號數------c++程序設計原理與實踐(進階篇)
效果 進階 str 二進制位 bsp () 都是 有符號 重新 有符號數與無符號數的程序設計原則: 當需要表示數值時,使用有符號數(如 int)。 當需要表示位集合時,使用無符號數(如unsigned int)。 有符號數和無符號數混合運算有可能會帶來災難性的後果。例如
動態內存分配存在的問題(內存空洞)------c++程序設計原理與實踐(進階篇)
我們 程序 動態 height ++ idt 很多 alt 空間 new的問題究竟在哪裏呢?實際上問題出在new和delete的結合使用上。考察下面程序中內存分配和釋放過程: while(1){ Big* p=new big; //...... Smal
數值限制------c++程序設計原理與實踐(進階篇)
c++程序 its positive size true 設置 malle 設計原理 硬件 每種c++的實現都在<limits>、<climits>、<limits.h>和<float.h>中指明了內置類型的屬性,因此程序