
Java粗淺認識-併發程式設計(一)
執行緒簡介
程序,作業系統中分配資源的基本單元,執行緒,作業系統中執行的基本單元,在一個程序中可以包含一個或多個執行緒,程序間通訊,資源共享效率低,在同一個程序中,所有執行緒共享資源。
執行緒在使用時,也存在各種問題,執行緒安全性,執行緒活躍性,執行緒效能
執行緒安全性
在多執行緒環境中,能夠正確地處理多個執行緒之間的共享變數,使程式功能正確完成,這裡的正確完成,就是每個執行緒得到預期值。
示例程式碼中,thread1和thread2共享資源ArrayList,而ArrayList本身並不是執行緒安全的容器,在每個執行緒中都各自取出list中第一個元素加50次,我們期望的值是100,經過執行後,值可能不是100,就存線上程安全性問題
public static void count() { List<Integer> list = new ArrayList<>(); list.add(0); Thread thread1 = new Thread(new Task(list)); Thread thread2 = new Thread(new Task(list)); thread1.start(); thread2.start(); try { thread1.join(); thread2.join(); } catch (InterruptedException e) { e.printStackTrace(); } System.out.println(list.get(0)); } public static class Task implements Runnable { List<Integer> list; public Task(List<Integer> list) { this.list = list; } @Override public void run() { for (int i = 0; i < 50; i++) { int value = list.get(0); list.set(0, ++value); } } }
執行緒活躍性問題
執行緒活躍性問題,死鎖,弱響應性,飢餓,活鎖,丟失的訊號等
死鎖
當兩個以上的運算單元,雙方都在等待對方停止執行,以獲取系統資源,但是沒有一方提前退出時,就稱為死鎖。
死鎖例項
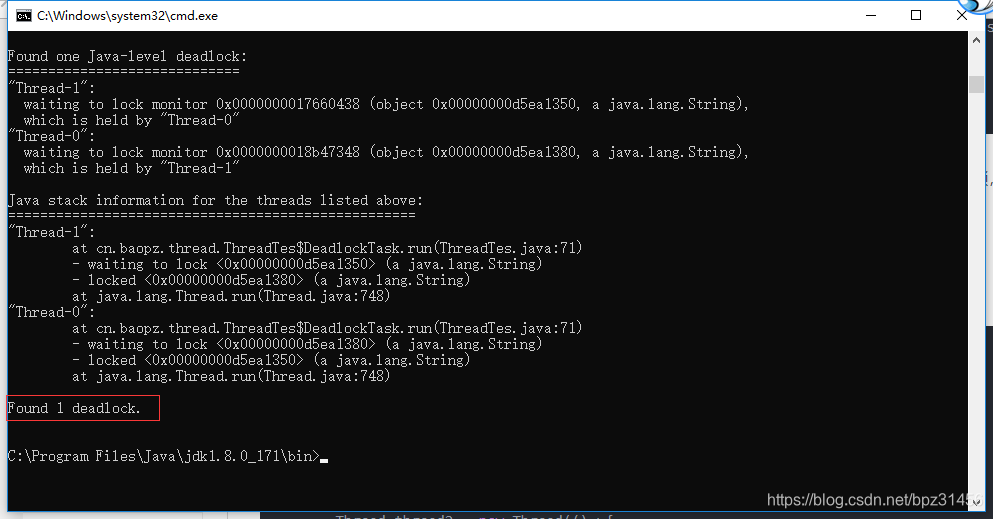
public static void deadlock() { String sourceA = "A"; String sourceB = "B"; Thread thread1 = new Thread(new DeadlockTask(sourceA,sourceB)); Thread thread2 = new Thread(new DeadlockTask(sourceB,sourceA)); thread1.start(); thread2.start(); try { thread1.join(); thread2.join(); } catch (InterruptedException e) { e.printStackTrace(); } } public static class DeadlockTask implements Runnable{ private String first; private String sec; public DeadlockTask(String first,String sec){ this.first = first; this.sec = sec; } @Override public void run() { synchronized (first){ System.out.println(Thread.currentThread().getName()+"獲取到資源:"+ first); try { TimeUnit.SECONDS.sleep(1); } catch (InterruptedException e) { e.printStackTrace(); } synchronized (sec){ System.out.println(Thread.currentThread().getName()+"獲取到資源:"+ sec); } } } }
造成死鎖有幾個因素,禁止搶佔、持有和等待、互斥、迴圈等待,只要打破其中一個條件就不會產生死鎖,java中減少在鎖巢狀,超時等待獲取鎖等。
死鎖檢測手段
1.用 jstack <pid>工具轉存stack資訊,進行檢測
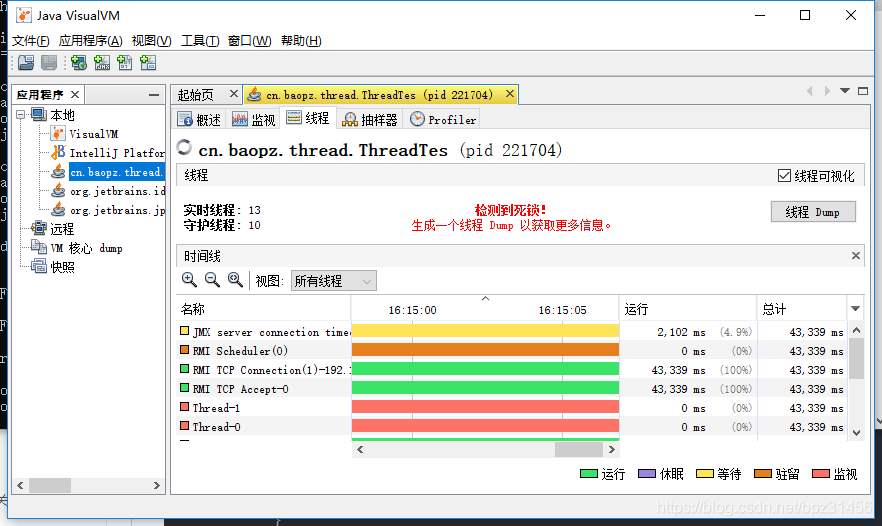
2.用jvisualvm 圖形化工具檢視
飢餓
在多執行緒環境中,執行緒永遠輪不到cpu時間片,一直處於等待狀態,這個不好演示,也不好檢測,以下程式演示了設定執行緒優先順序,避免飢餓就是儘量減少執行緒優先順序設定。
public static void lockHunger(){
Thread thread1 = new Thread(new Runnable(){
@Override
public void run() {
System.out.println("A");
}
});
thread1.setPriority(Thread.MIN_PRIORITY);
Thread thread2 = new Thread(()->{
System.out.println("B");
});
thread2.setPriority(Thread.MAX_PRIORITY);
thread1.start();
thread2.start();
try {
thread1.join();
thread2.join();
} catch (InterruptedException e) {
e.printStackTrace();
}
}弱響應性
cpu大量時間在處理其他任務,而對某些執行緒排程時間較少,導致響應緩慢,緩解辦法,就是把響應較慢的執行緒優先順序設定高些。
活鎖
執行緒並沒有阻塞,而是不斷重試相同的操作,但是總是失敗,一直處於這種尷尬的狀態,避免的操作,增加重試次數限制機制。
例項程式碼中,執行緒嘗試去對狀態值經行修改,然後做一次db互動。
private static void livelock() {
final AtomicInteger status = new AtomicInteger();
Thread thread = new Thread(()->{
while(status.getAndAdd(0)==0){
System.out.println("嘗試修改狀態.");
try {
TimeUnit.SECONDS.sleep(1);
} catch (InterruptedException e) {
e.printStackTrace();
}
}
System.out.println("做一次DB互動,儲存狀態值。");
},"活鎖測試.");
thread.start();
try {
thread.join();
} catch (InterruptedException e) {
e.printStackTrace();
}
}丟失的訊號
給執行緒一個可預期的訊號值,然後讓這個執行緒繼續下面的,但是沒有得到這個訊號,導致的問題。
測試例項,thread1設定訊號,thread2根據訊號執行任務,由於訊號執行緒的執行無法預知,雖然thread1先呼叫start(),但是很可能thread2得不到預期的值,避免程式,在thread2中while等待,將不會產生這個問題。
private static void lostSemaphore() {
final AtomicBoolean semaphore = new AtomicBoolean();
Thread thread1 = new Thread(() -> {
System.out.println("設定訊號量");
semaphore.set(true);
}, "設定訊號量。");
Thread thread2 = new Thread(() -> {
if (semaphore.get()) {
System.out.println("繼續我的任務。");
}
}, "接受訊號量。");
thread1.start();
thread2.start();
try {
thread1.join();
thread2.join();
} catch (InterruptedException e) {
e.printStackTrace();
}
}執行緒效能
多執行緒比單線提高了效能,但是也會帶來一定開銷,當這個開銷非常大時,就會出現執行緒新能問題,具體只對多執行緒的管理,執行緒建立,執行緒排程,執行緒銷燬,上下文切換(執行緒在執行和阻塞狀態相互切換時),自旋等待,記憶體同步等。
1.採用多執行緒,是多大限度的讓cpu做有用的事情(而不是在上下文切換這種任務消耗),一個任務需要多少執行緒同時處理才能達到達到最佳效能呢?設定一個非常大的值對不對呢?
這個值需要不斷的測試才能得出,在Netty中NioEventLoopGroup中預設值是cup核數*2。
2.阿姆達爾定律(英語:Amdahl's law,Amdahl's argument),一個電腦科學界的經驗法則,因吉恩·阿姆達爾而得名。它代表了處理器並行運算之後效率提升的能力。
S=1/(1-a+a/n),a為平行計算部分所佔比例,n為並行處理結點個數。這樣,當1-a=0時,(即沒有序列,只有並行)最大加速比s=n;當a=0時(即只有序列,沒有並行),最小加速比s=1;當n→∞時,極限加速比s→ 1/(1-a),這也就是加速比的上限。(阿姆達爾定律)
總結,這章節講了執行緒簡介,以及執行緒安全性問題,執行緒活躍性問題,以及執行緒效能問題,下一章節講解執行緒的狀態,執行緒的建立,執行緒同步器。