
演算法導論--最小生成樹(Kruskal和Prim演算法)
阿新 • • 發佈:2018-12-24
關於圖的幾個概念定義:
- 連通圖:在無向圖中,若任意兩個頂點
vi 與vj 都有路徑相通,則稱該無向圖為連通圖。 - 強連通圖:在有向圖中,若任意兩個頂點
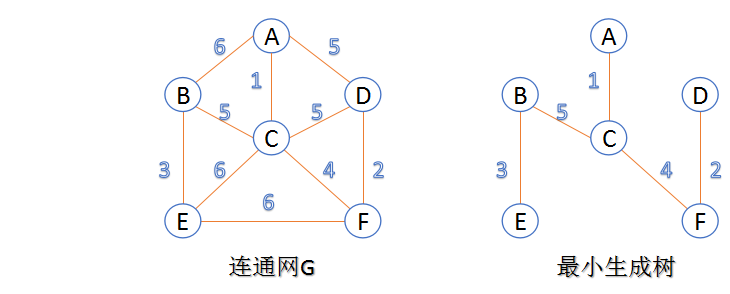
vi 與vj 都有路徑相通,則稱該有向圖為強連通圖。 - 連通網:在連通圖中,若圖的邊具有一定的意義,每一條邊都對應著一個數,稱為權;權代表著連線連個頂點的代價,稱這種連通圖叫做連通網。
- 生成樹:一個連通圖的生成樹是指一個連通子圖,它含有圖中全部n個頂點,但只有足以構成一棵樹的n-1條邊。一顆有n個頂點的生成樹有且僅有n-1條邊,如果生成樹中再新增一條邊,則必定成環。
- 最小生成樹:在連通網的所有生成樹中,所有邊的代價和最小的生成樹,稱為最小生成樹。
下面介紹兩種求最小生成樹演算法
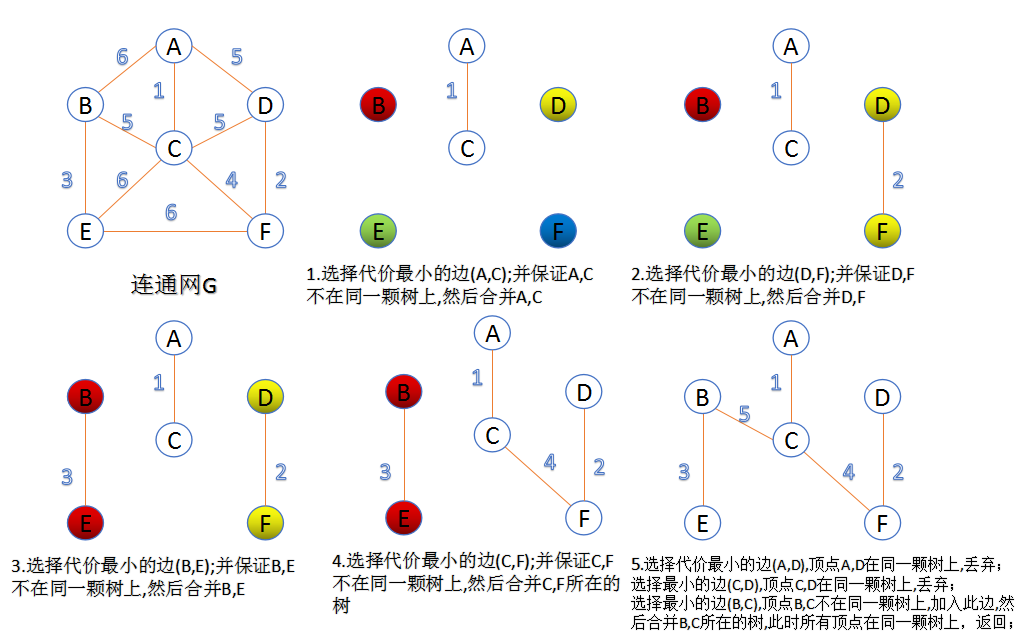
1.Kruskal演算法
此演算法可以稱為“加邊法”,初始最小生成樹邊數為0,每迭代一次就選擇一條滿足條件的最小代價邊,加入到最小生成樹的邊集合裡。
1. 把圖中的所有邊按代價從小到大排序;
2. 把圖中的n個頂點看成獨立的n棵樹組成的森林;
3. 按權值從小到大選擇邊,所選的邊連線的兩個頂點
4. 重複(3),直到所有頂點都在一顆樹內或者有n-1條邊為止。
2.Prim演算法
此演算法可以稱為“加點法”,每次迭代選擇代價最小的邊對應的點,加入到最小生成樹中。演算法從某一個頂點s開始,逐漸長大覆蓋整個連通網的所有頂點。
- 圖的所有頂點集合為
V ;初始令集合u={s},v=V−u ; - 在兩個集合
u,v 能夠組成的邊中,選擇一條代價最小的邊(u0,v0) ,加入到最小生成樹中,並把v0 併入到集合u中。 - 重複上述步驟,直到最小生成樹有n-1條邊或者n個頂點為止。
由於不斷向集合u中加點,所以最小代價邊必須同步更新;需要建立一個輔助陣列closedge,用來維護集合v中每個頂點與集合u中最小代價邊資訊,:
struct
{
char vertexData //表示u中頂點資訊
UINT lowestcost //最小代價
}closedge[vexCounts]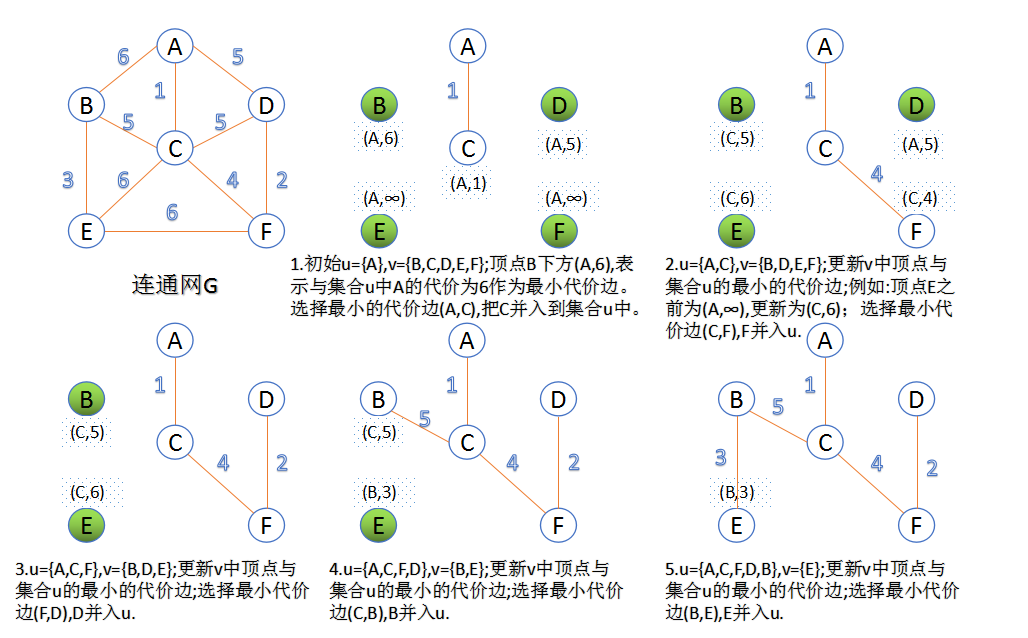
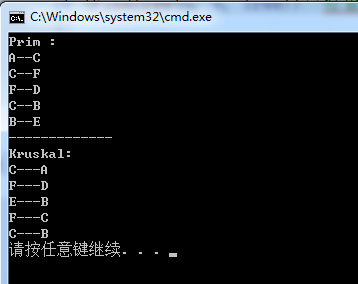
3.完整程式碼
/************************************************************************
CSDN 勿在浮沙築高臺 http://blog.csdn.net/luoshixian099演算法導論--最小生成樹(Prim、Kruskal)2016年7月14日
************************************************************************/ 
Reference:
資料結構–耿國華
演算法導論–第三版