
邊緣檢測Image Gradients+Canny edge detection——opencv_python
Image Gradients
opencv提供了三種梯度濾波器或者叫高通濾波器。分別為cv.Sobel(), cv.Scharr(), cv.Laplacian()
Sobel and Scharr
Sobel(索貝爾)運算元是高斯平滑加微分運算,具有較強的抗噪性。您可以指定要取的導數的方向,垂直的或水平的(分別通過引數yorder和xorder)。您還可以通過引數ksize指定核心的大小。當ksize=-1時,Scharr比Sobel更好。
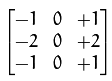
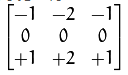
Sobel運算元
水平運算元
垂直運算元
Scharr運算元
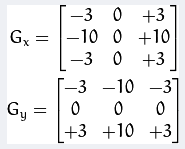
與Sobel相比,在3*3的核的狀態下,Scharr運算元更加的準確
Laplacian
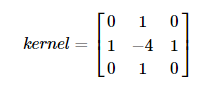
缺點:沒有了邊緣的方向資訊;雙倍加強了噪聲的影響。
相關推薦
邊緣檢測Image Gradients+Canny edge detection——opencv_python
Canny Edge Detection 參考地址 Image Gradients opencv提供了三種梯度濾波器或者叫高通濾波器。分別為cv.Sobel(), cv.Scharr(), cv.Laplacian() Sobel and Scharr Sobel(索貝爾)運
OpenCV學習筆記(7)--Canny Edge Detection Canny邊緣檢測
Canny 邊緣檢測是很流行的邊緣檢測演算法,是在1986年由John F.Canny提出的。它是一個多級(multi-stage)演算法。下面詳細介紹每一級。 1.減少噪音 因為邊緣檢測對噪音非常敏感,所以實現邊緣檢測的第一步,是使用高斯
Android opencv(三) 邊緣檢測Sobel、Canny
Sobel Sobel是檢測邊緣的一階導數,在檢測邊緣前需要通過濾波(blur)去噪來使圖片光滑,一般使用高斯濾波,大小取7x7. //高斯濾波 public static Mat removeNoiseGaussianBlur(Mat sr
數字影象處理筆記——邊緣檢測(Edge detection)
邊緣檢測 我們之前講邊緣檢測的時候講到了一階導和二階導,理想邊緣的畫素值是跳變的,而斜坡邊緣的畫素值是漸變的。我們在求一階導的時候導數值大的地方可以看做邊緣;若是對於斜坡邊緣,我們不想得到一長條邊緣,而只想得到這個漸變的中央點時,我們可以看二階導,二階導只在邊緣開始與結束的地方會出現,因此我們只
CNN邊緣檢測--Richer Convolutional Features for Edge Detection
Richer Convolutional Features for Edge Detection CVPR2017 Caffe:https://github.com/yun-liu/rcf 本文針對邊緣檢測問題,基於 VGG16 網路設計了一個 rich
降噪 (Noise Reduction)對於影象邊緣檢測 (Edge Detection)的意義
對於拍攝到的影象,在識別其中物體的邊緣時,一定要先降噪 1. 首先,邊緣檢測的演算法如下圖所示: 原始影象如上圖所示,肉眼可見清晰的邊緣。 其強度函式 (Intensity Function)如下: 那麼,邊緣的識別是基於強度函式的一
深度學習筆記(4):1.1-1.3 邊緣檢測(edge detection)
第四課開始,我們開始學習卷積神經網路。 1.1 計算機視覺(computer vision) 深度學習在計算機視覺方面的應用非常振奮人心,一方面是該應用使許多不可能變成了可能,另一方面是深度學習在計算機視覺方面的應用能夠給深度學習在其他方面的應用帶來一些方法的改進和思考,
canny邊緣檢測 demo
filename channels rfi 作用 namespace str named names amp #include <iostream> #include <string> #include <sstream>
Canny邊緣檢測算法原理及其VC實現詳解(一)
常用 差分 實現圖 還需要 鏈接 傳感器 出了 關系 位置 轉自:http://blog.csdn.net/likezhaobin/article/details/6892176 圖象的邊緣是指圖象局部區域亮度變化顯著的部分,該區域的灰度剖面一般可以看作是一個階躍,既從
六 OpenCV圖像處理4 Canny 邊緣檢測
alt left 最大的 max plt src 分享 body 邊界 1.Canny 邊緣檢測原理 步驟: ·1噪聲去除: 由於邊緣檢測很容易受到噪聲影響,所以第一步是使用 5x5 的高斯濾波器 去除噪聲 ·2計算圖像梯度:
OpenCV學習代碼記錄——canny邊緣檢測
scalar pos down 輸入 canny emp 函數 color 什麽 很久之前學習過一段時間的OpenCV,當時沒有做什麽筆記,但是代碼都還在,這裏把它貼出來做個記錄。 代碼放在碼雲上,地址在這裏https://gitee.com/solym/OpenCVTes
基於opencv下對視頻的灰度變換,高斯濾波,canny邊緣檢測處理,同窗體顯示並保存
rmi 其他 AS info ali 利用 測試結果 14. 中間 如題:使用opencv打開攝像頭或視頻文件,實時顯示原始視頻,將視頻每一幀依次做灰度轉換、高斯濾波、canny邊緣檢測處理(原始視頻和這3個中間步驟處理結果分別在一個窗口顯示),最後將邊緣檢測結果保存為一個
OpenCV學習筆記(11)——Canny邊緣檢測
bubuko nal die pan 一個 變化 我們 大小 ima 了解Canny邊緣檢測的概念 1.原理 Canny邊緣檢測是一種非常流行的邊緣檢測算法,是 John F。Canny在1986年提出的。它是一個有很多步構成的算法 1)噪聲去除 使用5*5的高
十四天canny邊緣檢測
import cv2 as cv def edge_demo(image): blurred = cv.GaussianBlur(image, (3, 3), 0) gray = cv.cvtColor(blurred, cv.COLOR_BGR2GRAY) xgrad
梯度與邊緣檢測常用運算元:Roberts、Prewitt、Sobel、LOG,Canny、Lapacian運算元
原文:https://blog.csdn.net/swj110119/article/details/51777422 原文:https://blog.csdn.net/gdut2015go/article/details/46779251 幾種邊緣檢測運算元的比較Robert
Shader特效——“Canny邊緣檢測”的實現 【GLSL】
演算法參考自: http://blog.sina.com.cn/s/blog_676b40ec0100z2pt.html http://blog.csdn.net/xiajun07061225/article/details/6926108 在寫這篇文章的時候,發現網上關於ca
影象處理(七)——Canny邊緣檢測
Canny邊緣檢測運算元是John F. Canny於 1986 年開發出來的一個多級邊緣檢測演算法。更為重要的是 Canny 創立了邊緣檢測計算理論(Computational theory of edge detection)解釋這項技術如何工作。 通常情況下邊緣檢測的目的是
邊緣檢測---Canny運算元
http://www.cnblogs.com/techyan1990/p/7291771.html 1.Canny邊緣檢測演算法可以分為以下5個步驟: 1) 使用高斯濾波器,以平滑影象,濾除噪聲。 2)&
0032-使用OpenCV對影象作邊緣檢測(Canny、Sobel、Laplace)
邊緣檢測是影象處理和計算機視覺中的基本問題,邊緣檢測的目的是標識數字影象中亮度變化明顯的點。影象屬性中的顯著變化通常反映了屬性的重要事件和變化。 這些包括(i)深度上的不連續、(ii)表面方向不連續、(iii)物質屬性變化和(iv)場景照明變化。 邊緣檢測是影象處理和計算機視覺中,尤其是特徵提取中的
OpenCV邊緣檢測三種演算法(canny、sobel、laplacian)
Canny演算法 #include<opencv2\opencv.hpp> #include<opencv2\highgui\highgui.hpp> using namespace std; using namespace cv; //邊緣檢測 int mai