
python opencv入門 分水嶺演算法(29)
內容來自OpenCV-Python Tutorials 自己翻譯整理
目標
使用分水嶺演算法對基於標記的影象進行分割
使用函式cv2.watershed()
原理:
灰度影象可以被看成拓撲平面,灰度值高的區域可以看出山峰,灰度值低的區域可以看成是山谷。向每一個山谷當中灌不同顏色的水。水位升高,不同山谷的水會匯合,為防止不同山谷的水匯合,小在匯合處建立起堤壩。然後繼續灌水,然後再建立堤壩,直到山峰都掩模。構建好的堤壩就是影象的分割。
此方法通常會得到過渡分割的結果,因為影象中的噪聲以及其他因素。為了減少此影響,opencv使用基於標記的分水嶺演算法,此演算法要設定哪些山谷中的匯合點,哪些不是。這是一種互動式的影象分割演算法那。我們要給已知物件打上不同表情。如果某個區域肯定是前景或物件,就使用某個顏色或灰度值標籤標記它。如果是背景那麼使用其他顏色進行標記,其餘不能確定的部分用0標記。然後使用分水嶺演算法,每次灌水,標籤會被更新,當兩個不同顏色的標籤相遇就會構建堤壩,知道所有山峰掩模,最後得到的邊界物件值是-1。
程式碼:
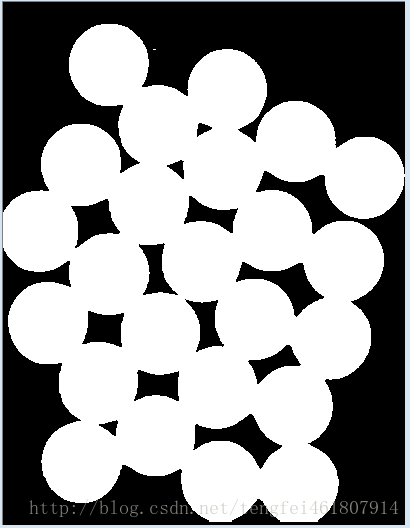
對挨在一起的物件進行分割。

使用Otsu’s 二值化後的結果為
要出去影象中的白噪聲。可以使用形態學運算,使用閉運算去除物件中的空洞。
靠近物件中心的區域是前景,離物件遠的區域是背景,不確定的區域是邊界。
首先提取硬幣區域,使用腐蝕操作去掉邊緣,剩下的就是硬幣。但硬幣沒有接觸時,此方法有效,但是由於硬幣相互接觸,就要使用另外一種有效的方法:距離變換加上合適的閾值。
之後,要尋找不確定是否是硬幣的區域。這裡需要膨脹操作。膨脹操作會將物件邊界延伸到背景當中。由於邊界區域被去除,現在就能知道哪些區域是前景,哪些是背景。
餘下的區域不知道如何區分,那麼使用分水嶺演算法。這些區域通常是前景與背景的交界處。從能否確認是否是背景的區域中減去確定是前景的區域就得到了邊界。
(前景和背景)
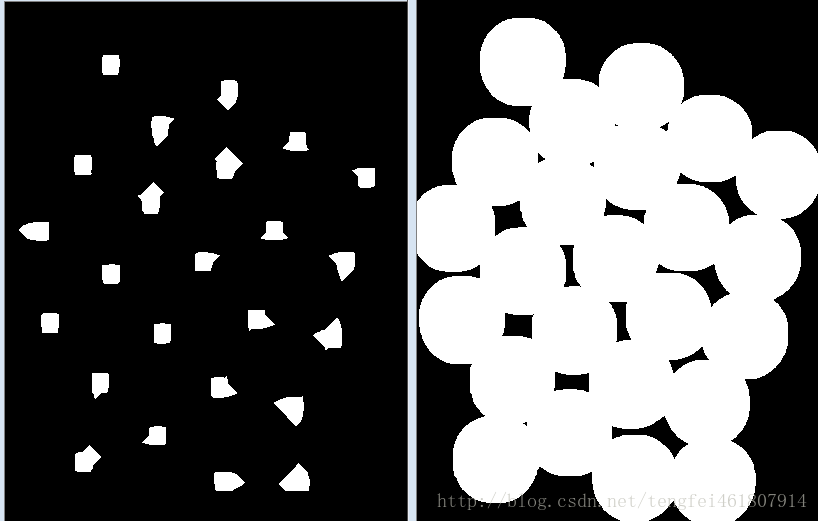
(上面的圖是直接使用作者的程式碼後生產的結果,提取到了前景,為了演示一下不確定的區域,調了一下計算前景的距離變換的引數,使得中間出現不確定的區域)
這裡面使用個cv2.distanceTransform函式
該函式用於計算2值圖象中所有畫素離其最近的值為0畫素的近似距離。
引數為
cv2.distanceTransform(src, distanceType, maskSize[, dst]) → dst
src為輸入的二值影象。distanceType為計算距離的方式,可以是如下值
DIST_USER = ⑴, //!< User defined import numpy as np
import cv2
from matplotlib import pyplot as plt
img = cv2.imread('21.jpg')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray,0,255,cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU)
kernel = np.ones((3,3),np.uint8)
opening = cv2.morphologyEx(thresh,cv2.MORPH_OPEN,kernel, iterations = 2)
# sure background area
sure_bg = cv2.dilate(opening,kernel,iterations=3)#膨脹
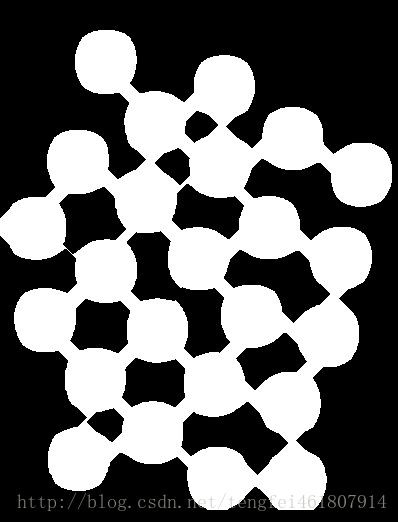
# Finding sure foreground area
dist_transform = cv2.distanceTransform(opening,1,5)
ret, sure_fg = cv2.threshold(dist_transform,0.2*dist_transform.max(),255,0)#引數改小了,出現不確定區域
# Finding unknown region
sure_fg = np.uint8(sure_fg)
unknown = cv2.subtract(sure_bg,sure_fg)#減去前景
cv2.imshow('p',sure_fg)
cv2.waitKey(0)現在知道了那些背景是硬幣,可以建立標籤。(與原影象大小相同,資料型別為int32的陣列)。
對於已經確定分類的區域,也就是背景和前景,使用整數標記,不確定的區域是用0標記。可以使用cv2.connectedComponents()函式來實現此功能。它會將背景標記為0,其他標記為位從1開始的正整數。
但是,如果背景標記為0,那麼分水嶺演算法會將其當成位置區域,所以使用不同的整數進行標記,對於不確定的區域,函式標記為0.
結果使用JET顏色地圖表示。深藍色未知區域,硬幣區域使用不同顏色。其餘部分用淺藍色。
使用分水嶺演算法
效果不錯
