
裝置樹學習之(二)點燈
阿新 • • 發佈:2018-12-30
開發板:tiny4412SDK + S702 + 4GB Flash
要移植的核心版本:Linux-4.4.0 (支援device tree)
u-boot版本:友善之臂自帶的 U-Boot 2010.12
busybox版本:busybox 1.25
目標:
學習裝置樹中GPIO控制器的使用,實現配置引腳為輸出功能,寫簡單的字元裝置驅動程式,實現點亮LED。
原理圖:
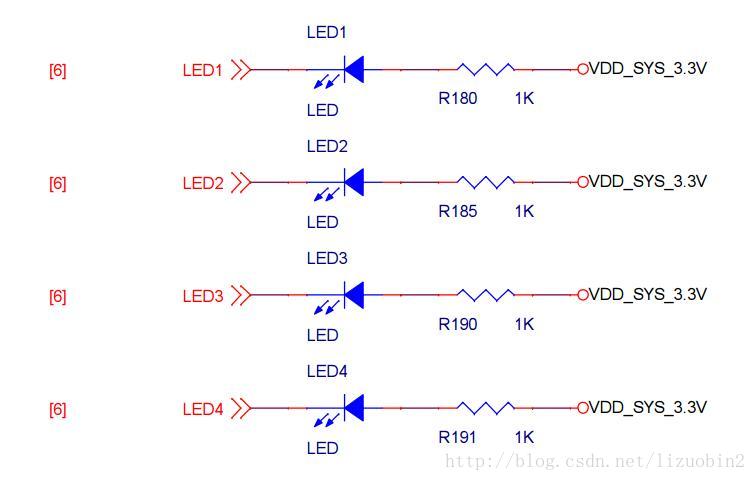
tiny4412 核心板上有6顆LED,這裡我們只控制其中4顆,它們分別接在GPM4_0、GPM4_1、GPM4_2、GPM4_3 引腳。想要點亮LED,首先得配置引腳為輸出功能,輸出低電平時LED點亮,高電平時,LED熄滅。重點在於裝置樹中GPIO控制器資源的使用。
裝置樹參考:
參考:Samsung GPIO and Pin Mux/Config controller
Example 1: A pin-controller node with pin groups.
pinctrl_0: [email protected]11400000 {
compatible = "samsung,exynos4210-pinctrl";
reg = <0x11400000 0x1000>;
interrupts = <0 47 0>;
/* ... */
uart0_data: uart0-data {
samsung,pins = "gpa0-0" 裝置樹:
&[email protected]11000000 {
led_demo: led{
samsung,pins = "gpm4-0", "gpm4-1" ,"gpm4-2", "gpm4-3";
samsung,pin-function = <0x1>; //1為輸出
samsung,pin-pud = <0x0>; //沒有上拉
samsung,pin-drv = <0x0>; //驅動強度?
};
};
led_pin {
compatible = "tiny4412,led_demo";
pinctrl-names = "led_demo";
pinctrl-0 = <&led_demo>;
tiny4412,int_gpio1 = <&gpm4 0 GPIO_ACTIVE_HIGH>;
tiny4412,int_gpio2 = <&gpm4 1 GPIO_ACTIVE_HIGH>;
tiny4412,int_gpio3 = <&gpm4 2 GPIO_ACTIVE_HIGH>;
tiny4412,int_gpio4 = <&gpm4 3 GPIO_ACTIVE_HIGH>;
};
我們在 pinctrl 中增加了 led 節點,它代表了一種引腳功能,比如這裡設定的 gpm4_0、gpm4_1、gpm4_2、gpm4_3,引腳功能為 0x01 輸出,無上拉等等。在其它地方,我們可以引用它,來表示引腳支援的功能。
下面我們增加了 led_pin 節點,它有一個屬性 pinctrl-names = “led_demo”,這是我們給引腳功能狀態起的名字,如果支援多種功能,可以是字串列表的形式。字串的個數要和下面 pinctrl-n 的個數對應,pinctrl-0 引用了我們前面定義的那個將引腳設定為輸出功能的屬性。
在程式碼中,我們可以用過 pinctrl-names 來獲得特定的引腳功能,並設定它。如果 pinctrl-names 為 “default”,那麼這種功能狀態將設定為預設的引腳狀態,程式碼中無需處理。
程式碼片段:
static int led_probe(struct platform_device *pdev) {
struct device *dev = &pdev->dev;
dev_t devid;
struct pinctrl *pctrl;
struct pinctrl_state *pstate;
pctrl = devm_pinctrl_get(dev);
if(pctrl == NULL)
{
printk("devm_pinctrl_get error\n");
}
pstate = pinctrl_lookup_state(pctrl, "led_demo");
if(pstate == NULL)
{
printk("pinctrl_lookup_state error\n");
}
pinctrl_select_state(pctrl, pstate);//設定為輸出模式
printk("enter %s\n",__func__);
led1 = of_get_named_gpio(dev->of_node, "tiny4412,int_gpio1", 0);;
led2 = of_get_named_gpio(dev->of_node, "tiny4412,int_gpio2", 0);;
led3 = of_get_named_gpio(dev->of_node, "tiny4412,int_gpio3", 0);;
led4 = of_get_named_gpio(dev->of_node, "tiny4412,int_gpio4", 0);;
if(led1 <= 0)
{
printk("%s error\n",__func__);
return -EINVAL;
}
else
{
printk("led1 %d\n",led1);
printk("led2 %d\n",led2);
printk("led3 %d\n",led3);
printk("led4 %d\n",led4);
devm_gpio_request_one(dev, led1, GPIOF_OUT_INIT_HIGH, "LED1");
devm_gpio_request_one(dev, led2, GPIOF_OUT_INIT_HIGH, "LED2");
devm_gpio_request_one(dev, led3, GPIOF_OUT_INIT_HIGH, "LED3");
devm_gpio_request_one(dev, led4, GPIOF_OUT_INIT_HIGH, "LED4");
}
完整程式碼:
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/platform_device.h>
#include <linux/gpio.h>
#include <linux/of.h>
#include <linux/of_gpio.h>
#include <linux/fs.h>
#include <asm/uaccess.h>
#define LED_CNT 4
static int major;
static struct cdev led_cdev; //核心中用cdev描述一個字元裝置
static struct class *cls;
static int led1,led2,led3,led4;
static ssize_t led_write(struct file *file, const char __user *user_buf, size_t count, loff_t *ppos)
{
char buf;
int minor = iminor(file->f_inode);
printk("minor is %d\n",minor);
printk("%s\n",__func__);
if(count != 1){
printk("count != 1\n");
return 1;
}
if (copy_from_user(&buf, user_buf, count))
return -EFAULT;
printk("rcv %d\n",buf);
if(buf == 0x01)
{
switch(minor){
case 0:
gpio_set_value(led1, 0);
break;
case 1:
gpio_set_value(led2, 0);
break;
case 2:
gpio_set_value(led3, 0);
break;
case 3:
gpio_set_value(led4, 0);
break;
default:
printk("%s rcv minor error\n",__func__);
}
}
else if(buf == 0x0)
{
switch(minor){
case 0:
gpio_set_value(led1, 1);
break;
case 1:
gpio_set_value(led2, 1);
break;
case 2:
gpio_set_value(led3, 1);
break;
case 3:
gpio_set_value(led4, 1);
break;
default:
printk("%s rcv minor error\n",__func__);
}
}
}
static int led_open(struct inode *inode, struct file *file)
{
printk("led_open\n");
return 0;
}
static struct file_operations led_fops = {
.owner = THIS_MODULE,
.open = led_open,
.write = led_write,
};
static int led_probe(struct platform_device *pdev) {
struct device *dev = &pdev->dev;
dev_t devid;
struct pinctrl *pctrl;
struct pinctrl_state *pstate;
pctrl = devm_pinctrl_get(dev);
if(pctrl == NULL)
{
printk("devm_pinctrl_get error\n");
}
pstate = pinctrl_lookup_state(pctrl, "led_demo");
if(pstate == NULL)
{
printk("pinctrl_lookup_state error\n");
}
pinctrl_select_state(pctrl, pstate);//設定為輸出模式
printk("enter %s\n",__func__);
led1 = of_get_named_gpio(dev->of_node, "tiny4412,int_gpio1", 0);;
led2 = of_get_named_gpio(dev->of_node, "tiny4412,int_gpio2", 0);;
led3 = of_get_named_gpio(dev->of_node, "tiny4412,int_gpio3", 0);;
led4 = of_get_named_gpio(dev->of_node, "tiny4412,int_gpio4", 0);;
if(led1 <= 0)
{
printk("%s error\n",__func__);
return -EINVAL;
}
else
{
printk("led1 %d\n",led1);
printk("led2 %d\n",led2);
printk("led3 %d\n",led3);
printk("led4 %d\n",led4);
devm_gpio_request_one(dev, led1, GPIOF_OUT_INIT_HIGH, "LED1");
devm_gpio_request_one(dev, led2, GPIOF_OUT_INIT_HIGH, "LED2");
devm_gpio_request_one(dev, led3, GPIOF_OUT_INIT_HIGH, "LED3");
devm_gpio_request_one(dev, led4, GPIOF_OUT_INIT_HIGH, "LED4");
}
if(alloc_chrdev_region(&devid, 0, LED_CNT, "led") < 0)/* (major,0~1) 對應 hello_fops, (major, 2~255)都不對應hello_fops */
{
printk("%s ERROR\n",__func__);
goto error;
}
major = MAJOR(devid);
cdev_init(&led_cdev, &led_fops); //繫結檔案操作函式
cdev_add(&led_cdev, devid, LED_CNT); //註冊到核心
cls = class_create(THIS_MODULE, "led"); //建立led類,向類中新增裝置,mdev會幫我們建立裝置節點
device_create(cls, NULL, MKDEV(major, 0), NULL, "led0");
device_create(cls, NULL, MKDEV(major, 1), NULL, "led1");
device_create(cls, NULL, MKDEV(major, 2), NULL, "led2");
device_create(cls, NULL, MKDEV(major, 3), NULL, "led3");
error:
unregister_chrdev_region(MKDEV(major, 0), LED_CNT);
return 0;
}
static int led_remove(struct platform_device *pdev) {
printk("enter %s\n",__func__);
device_destroy(cls, MKDEV(major, 0));
device_destroy(cls, MKDEV(major, 1));
device_destroy(cls, MKDEV(major, 2));
device_destroy(cls, MKDEV(major, 3));
class_destroy(cls);
cdev_del(&led_cdev);
unregister_chrdev_region(MKDEV(major, 0), LED_CNT);
printk("%s enter.\n", __func__);
return 0;
}
static const struct of_device_id led_dt_ids[] = {
{ .compatible = "tiny4412,led_demo", },
{},
};
MODULE_DEVICE_TABLE(of, led_dt_ids);
static struct platform_driver led_driver = {
.driver = {
.name = "led_demo",
.of_match_table = of_match_ptr(led_dt_ids),
},
.probe = led_probe,
.remove = led_remove,
};
static int led_init(void){
int ret;
printk("enter %s\n",__func__);
ret = platform_driver_register(&led_driver);
if (ret)
printk(KERN_ERR "led demo: probe failed: %d\n", ret);
return ret;
}
static void led_exit(void)
{
printk("enter %s\n",__func__);
platform_driver_unregister(&led_driver);
}
module_init(led_init);
module_exit(led_exit);
MODULE_LICENSE("GPL");