
跟我一起學Multiple View Geometry多檢視幾何(2)
前言:本篇部落格主要講fundamental matrix的由來與推導
9.2 The fundamental matrix F
綜合來說fundamental matrix就是epipolar geometry的代數表示,接下來我們從點和它對應的epipolar line來推導F,然後分析這個矩陣的性質。
9.2.1 幾何推導
我們把從一個點到求出它的對應的epipolar line這個過程分為兩步,第一步,左圖的x被map到右圖的x’,x’經過epipolar line l’,x’是x的一個潛在匹配點,第二步,我們連線x’與e’可以確定l’。
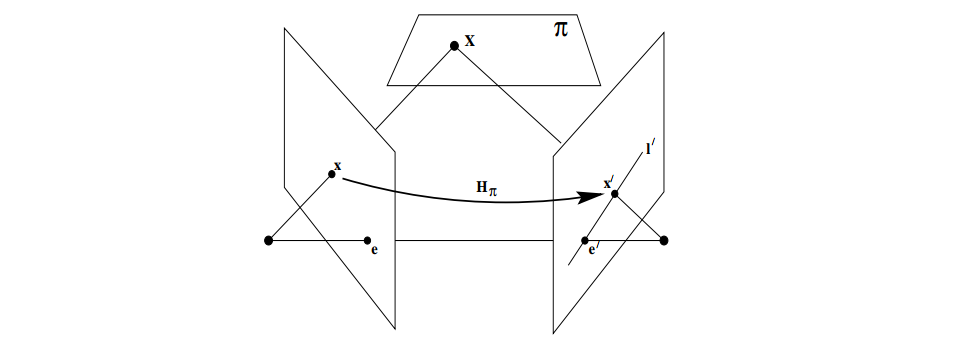
一個不經過相機中心的平面π,一條從左相機中心發出的射線經過x會與π交於點X,X在右圖的投影點是x’,而且x’必定經過l’,同理一系列這樣的點會對應一系列右圖中的
,由於他們都projectively equivalent(投影等價)於Xi,所以存在單應性矩陣H可以把每個x變換到x’。
第二步:構建epipolar line
經過右圖x’與e’的直線l’我們可以寫成,中括號加個叉代表反對稱矩陣,舉個例子:如果
,那麼
也就是想辦法把叉乘轉化成點乘,又,所以我們有
其中
Hπ就是在π平面上從一個影象平面到另一個影象平面的轉移矩陣,又[e’]x的rank是2,Hπ的rank是3,所以F的rank是2。
幾何上來講,F就是從左圖投影平面到一簇epipolar line的轉換矩陣,而且上面牽扯的到的π平面並對於F的存在來說並不是必要的,它只是用來幫助定義從左圖到右圖的點對應關係。
9.2.2 代數推導
我們可以通過求解投影方程 PX = x 得到:,P右上角加號代表P的偽逆矩陣,也就是
,C是相機鏡頭中心,PC = 0,這條直線可以看做λ的引數方程,當λ=0時這條線經過
,當λ=∞時直線經過C,這兩個點在右相機(相機矩陣是P’)的投影分別是
和P’C,連線這兩個投影點就得到了epipolar line,P’C就是左相機中心再右圖中的投影(epipole),所以我們得到:
其中
這跟我們上一節推匯出的公式是一致的,單應性矩陣Hπ有著關於兩個相機矩陣P’和P的明確形式:,注意這個公式再兩個相機中心重合時不成立,也就是P’C和PC一樣也為0時。
好了,今天公式不少,讀者消化一下吧。