
ubuntu16.04安裝/解除安裝+ROS+搜狗+pycharm安裝+chrom+顯示卡驅動切換
目錄
前期服務機器人一直使用虛擬機器除錯,程式處理速度一直跟不上,決定入手一臺遊戲本:dell 遊匣 5577
以下是安裝步驟以及必做的一些工作的整理
最近又遇到了一些坑,這裡補一下,主要是顯示卡相容問題 ——2018.5.9
1、製作USB啟動盤
工具:
- 膝上型電腦以及U盤
- 製作過程比較簡單:
- 開啟UltralSO,“檔案(F)”->“開啟”,找到“Ubuntu-16.04-desktop-amd64.iso”映象檔案;選擇“啟動(B)”->“寫入硬碟映像”,開啟啟動盤製作介面,開始製作啟動盤;製作完成後點選返回。
2、安裝Ubuntu、Win10雙系統
注意:DELL 遊匣 在安裝Ubuntu桌面版會卡在安裝介面(自帶驅動與英偉達驅動衝突)
- 啟動時按F12進入啟動項,選擇U盤安裝,在跳出來的安裝選項介面選到Install ubuntu,不要選擇,先按E進入grub的配置介面,將第三行的quite splash __ 替換為nomodeset,然後儲存,再返回上一介面進行安裝。之後就是簡單的圖形安裝了(由於新電腦是UEFI啟動,因此安裝完成後重啟直接可以選擇要進入的系統;若window 是bios啟動的,請不要參考這篇博文,因為安裝ubuntu時很容易覆蓋window的引導,後果自然就是再也進不去 windows咯)
- 遊匣安裝linux後會出現滑鼠卡頓,系統陷入死迴圈原因是顯示卡驅動不相容,解決方法參見第11節。
3、搜狗輸入法安裝
4、ROS-Kinetic安裝
installation部分參見wiki教程:installation
設定源:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'設定密匙:
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116更新:
sudo apt-get update安裝full kinetic:
sudo apt-get install ros-kinetic-desktop-full初始化rosdep:
sudo rosdep init rosdep update配置環境變數(注意:~/.bashrc經常需要修改):
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc source ~/.bashrc如果要使用其他版本的ROS,修改以上命令中的 Kinetic為你要使用的ros版本即可
構建包的依賴:
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential最後檢查一下ros的環境是否正確:
printenv | grep ROS正常將在終端看到以下輸出:
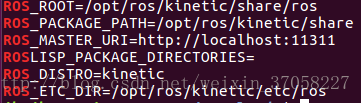
至此,ROS的安裝部分基本完成,之後若要使用到導航包等就屬於中級教程的內容了。
5、ROS IDE —— RoboWare Studio
6、ROS IDE —— Kdevelop
之前用慣了RoboWare,但是Roboware只針對ros開發,因此這次決定安裝Kdevelop。
簡單的幾步實現ROS 開發,比eclipse 簡單多了。記下來,備忘。
1. 安裝 kdevelop
sudo apt-get install kdevelop2. 安裝Cmake等
sudo apt-get install automake autoconf g++ libtool cmake 3. 新增到桌面
cd ~/Desktop
touch Kdevelop.desktop
chmod +x Kdevelop.desktop
sudo vim Kdevelop.desktop新增內容:
[Desktop Entry]
Type=Application
Terminal=false
Exec=bash -i -c "kdevelop"
Name=kDevelop
Icon=kdevelop儲存退出即可在桌面看到Kdevelop快捷方式。
4. 新增catkin工程
- 找到已存在的catkin 工程目錄,刪除已有的build目錄
rm -rf build- 開啟kdevelop 選單欄 project/open project 找到需要開啟的ros工程的CMakeLists.txt檔案。
- 保證如下圖的build目錄選擇如果沒有手工輸入,也就是與src同一級目錄。
- 如下圖新增編譯引數
-DCATKIN_DEVEL_PREFIX=../devel -DCMAKE_INSTALL_PREFIX=../install 注意:install前的..根據自己的情況輸入。 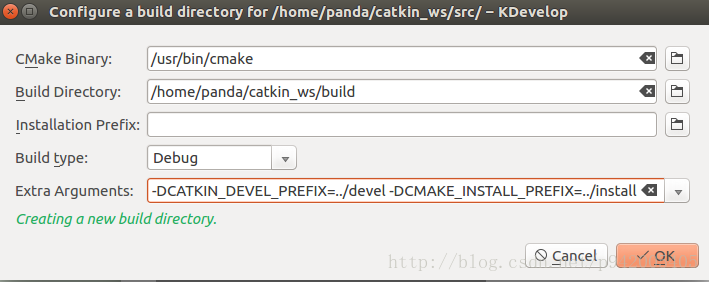
- 方案配色和基本設定根據個人喜好修改即可 
4. build 編譯除錯
-----------------------------------------------------
7、刪除ubuntu16.04
1、在window下磁碟管理刪除ubuntu所在盤
8、安裝pycharm
9、安裝chrom
sudo wget http://www.linuxidc.com/files/repo/google-chrome.list -P /etc/apt/sources.list.d/
wget -q -O - https://dl.google.com/linux/linux_signing_key.pub | sudo apt-key add -
sudo apt-get update
sudo apt-get install google-chrome-stable配置chrome能上google
10.新裝系統鍵盤滑鼠過段時間就失控
安裝完ubuntu後,進入圖形介面,過一會鍵盤滑鼠就失靈,主要表現為滑鼠點選、鍵盤輸入失控。
解決方法:
1.強制重啟
2.進入單使用者模式,在ubuntu高階選項下的recover mode,按e編輯啟動項,將把ro recovery nomodeset 改成rw single init=/bin/bash3.在單使用者模式下輸入
sudo vi /etc/default/grub找到quiet splash 在後面新增nomodeset
關於vi的使用,按a新增字元,按Esc和x刪除字元,儲存並退出輸入:wq!,不儲存輸入q!4、輸入echo "b" > /proc/sysrq-trigger ,計算機進入正常模式,並關機
11.新裝系統安裝N顯示卡驅動
安裝官方驅動:
先下載好對應的驅動,我的顯示卡是GTX1050
安裝過程中可能會出現一些提醒,例如要不要覆蓋uefi啊什麼的,所以建議安裝前先進入系統bios,將secure bios設定為disable
安裝ubuntu設定中的驅動:
直接在設定中選用即可
補充:Dell 遊匣或者英偉達的1050顯示卡最好使用ubuntu設定中的顯示卡驅動,安裝英偉達官網驅動在ubuntu雙屏顯示會有問題!
13.安裝wps
其中字型可以從此處下載: