
17、新手入手樹莓派教程--超聲波測距(HC-SR04)的使用
阿新 • • 發佈:2018-12-31
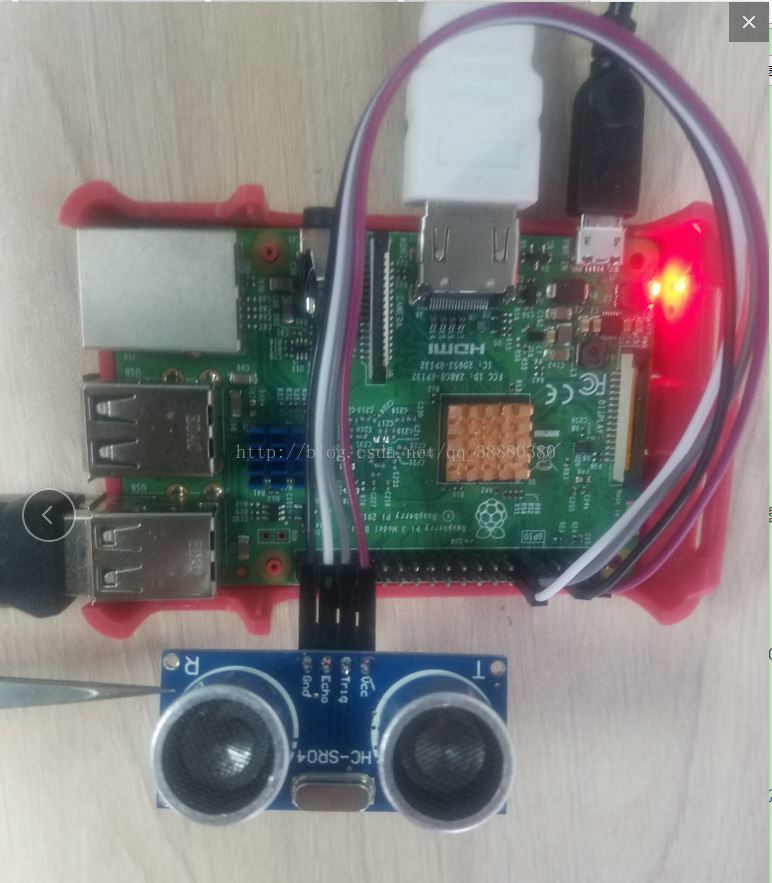
1.元件外觀:

HC-SR04 模組可以測量 3cm - 4m 的距離,精確度可以達到 3mm。它包含了超聲波發射器、接收器和控制電路三部分。
2.接線方式
一共兩個電源引腳和兩個控制引腳。
Vcc 和 Gnd 接 5v DC 電源,但不推薦用獨立電源給它供電,應使用樹莓派或微控制器的 GPIO 口輸出 5v 和 Gnd 給它供電。不然會影響這個模組的執行。
Trig 引腳用來接收樹莓派的控制訊號。接任意 GPIO 口。
Echo 引腳用來向樹莓派返回測距資訊。接任意 GPIO 口。
(注意 Echo 返回的是 5v訊號,而樹莓派的 GPIO 接收超過 3.3v 的訊號可能會被燒燬,因此需要加一個分壓電路,博主沒有加,直接用杜邦線連的)。
3.工作原理
(1)樹莓派向 Trig 腳傳送一個 10us 的脈衝訊號。
(2) HC-SR04 接收到訊號,開始傳送超聲波,並把 Echo置為高電平,然後準備接收返回的超聲波。
(3) HC-SR04 接收到返回的超聲波,把 Echo 置為低電平。
(4)Echo 高電平持續的時間就是超聲波從發射到返回的時間間隔。
(5)計算距離:
距離(單位:m) = (start - end) * 聲波速度 / 2
聲波速度取 343m/s 。
然後再把測得的距離轉換為 cm。
距離(單位:cm) = (start - end) * 聲波速度 / 2 * 100
= (start - end) * 17150
//
#include <wiringPi.h>
#include <stdio.h>
#include <sys/time.h>
#define Trig 0
#define Echo 1
void ultraInit(void)
{
pinMode(Echo, INPUT);
pinMode(Trig, OUTPUT);
}
float disMeasure(void)
{
struct timeval tv1;
struct timeval tv2;
long start, stop;
float dis;
digitalWrite(Trig, LOW);
delayMicroseconds(2);
digitalWrite(Trig, HIGH);
delayMicroseconds(10); //發出超聲波脈衝
digitalWrite(Trig, LOW);
while(!(digitalRead(Echo) == 1));
gettimeofday(&tv1, NULL); //獲取當前時間
while(!(digitalRead(Echo) == 0));
gettimeofday(&tv2, NULL); //獲取當前時間
start = tv1.tv_sec * 1000000 + tv1.tv_usec; //微秒級的時間
stop = tv2.tv_sec * 1000000 + tv2.tv_usec;
dis = (float)(stop - start) / 1000000 * 34000 / 2; //求出距離
return dis;
}
int main(void)
{
float dis;
if(wiringPiSetup() == -1){ //when initialize wiring failed,print messageto screen
printf("setup wiringPi failed !");
return 1;
}
ultraInit();
while(1){
dis = disMeasure();
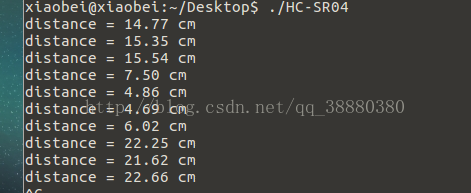
printf("distance = %0.2f cm\n",dis);
delay(1000);
}
return 0;
}
//編譯同 5、執行結果
致謝: