
Coursera吳恩達《卷積神經網路》課程筆記(1)-- 卷積神經網路基礎
《Convolutional Neural Networks》是Andrw Ng深度學習專項課程中的第四門課。這門課主要介紹卷積神經網路(CNN)的基本概念、模型和具體應用。該門課共有4周課時,所以我將分成4次筆記來總結,這是第一節筆記。
1. Computer Vision
機器視覺(Computer Vision)是深度學習應用的主要方向之一。一般的CV問題包括以下三類:
Image Classification
Object detection
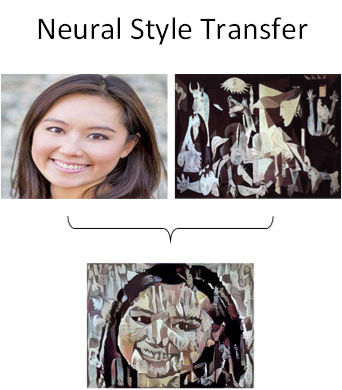
Neural Style Transfer
下圖展示了一個神經風格轉換(Neural Style Transfer)的例子:
使用傳統神經網路處理機器視覺的一個主要問題是輸入層維度很大。例如一張64x64x3的圖片,神經網路輸入層的維度為12288。如果圖片尺寸較大,例如一張1000x1000x3的圖片,神經網路輸入層的維度將達到3百萬,使得網路權重W非常龐大。這樣會造成兩個後果,一是神經網路結構複雜,資料量相對不夠,容易出現過擬合;二是所需記憶體、計算量較大。解決這一問題的方法就是使用卷積神經網路(CNN)。
2. Edge Detection Example
對於CV問題,我們在之前的筆記中介紹過,神經網路由淺層到深層,分別可以檢測出圖片的邊緣特徵 、區域性特徵(例如眼睛、鼻子等)、整體面部輪廓。

這一小節我們將介紹如何檢測圖片的邊緣。
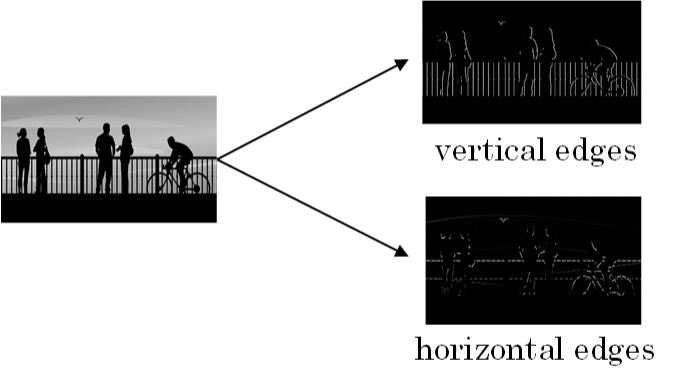
最常檢測的圖片邊緣有兩類:一是垂直邊緣(vertical edges),二是水平邊緣(horizontal edges)。
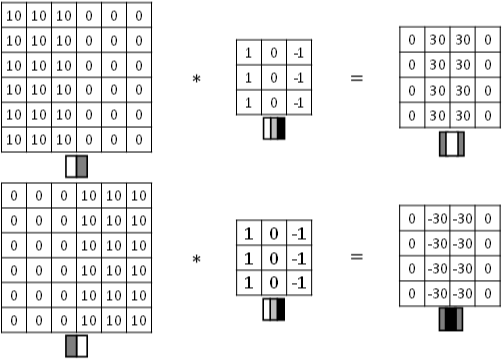
圖片的邊緣檢測可以通過與相應濾波器進行卷積來實現。以垂直邊緣檢測為例,原始圖片尺寸為6x6,濾波器filter尺寸為3x3,卷積後的圖片尺寸為4x4,得到結果如下:
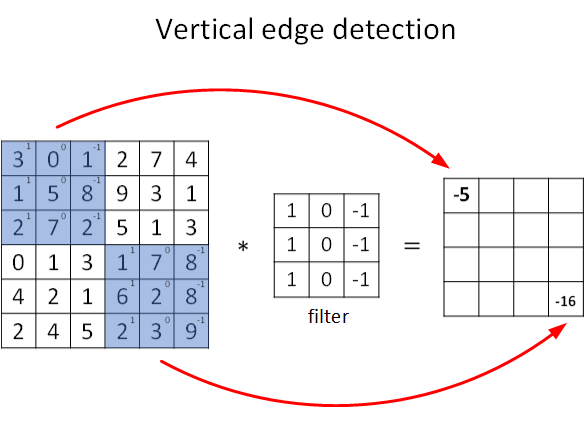
上圖只顯示了卷積後的第一個值和最後一個值。
順便提一下,
Vertical edge detection能夠檢測圖片的垂直方向邊緣。下圖對應一個垂直邊緣檢測的例子:
3. More Edge Detection
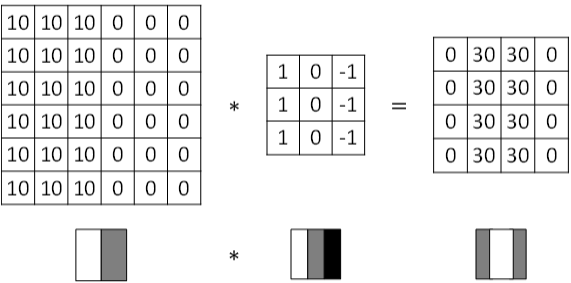
圖片邊緣有兩種漸變方式,一種是由明變暗,另一種是由暗變明。以垂直邊緣檢測為例,下圖展示了兩種方式的區別。實際應用中,這兩種漸變方式並不影響邊緣檢測結果,可以對輸出圖片取絕對值操作,得到同樣的結果。
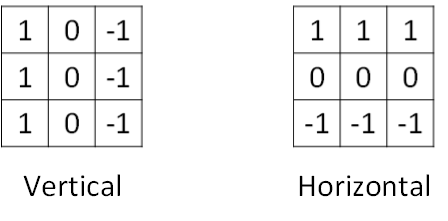
垂直邊緣檢測和水平邊緣檢測的濾波器運算元如下所示:
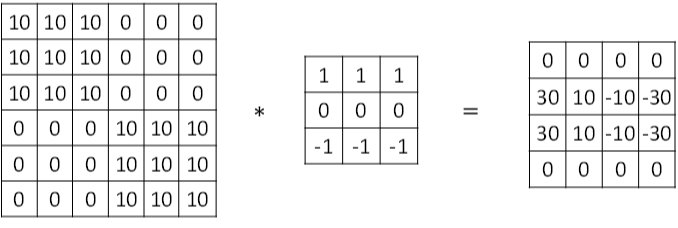
下圖展示一個水平邊緣檢測的例子:
除了上面提到的這種簡單的Vertical、Horizontal濾波器之外,還有其它常用的filters,例如Sobel filter和Scharr filter。這兩種濾波器的特點是增加圖片中心區域的權重。
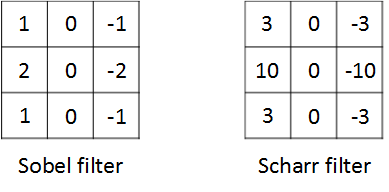
上圖展示的是垂直邊緣檢測運算元,水平邊緣檢測運算元只需將上圖順時針翻轉90度即可。
在深度學習中,如果我們想檢測圖片的各種邊緣特徵,而不僅限於垂直邊緣和水平邊緣,那麼filter的數值一般需要通過模型訓練得到,類似於標準神經網路中的權重W一樣由梯度下降演算法反覆迭代求得。CNN的主要目的就是計算出這些filter的數值。確定得到了這些filter後,CNN淺層網路也就實現了對圖片所有邊緣特徵的檢測。
4. Padding
按照我們上面講的圖片卷積,如果原始圖片尺寸為n x n,filter尺寸為f x f,則卷積後的圖片尺寸為(n-f+1) x (n-f+1),注意f一般為奇數。這樣會帶來兩個問題:
卷積運算後,輸出圖片尺寸縮小
原始圖片邊緣資訊對輸出貢獻得少,輸出圖片丟失邊緣資訊
為了解決圖片縮小的問題,可以使用padding方法,即把原始圖片尺寸進行擴充套件,擴充套件區域補零,用p來表示每個方向擴充套件的寬度。
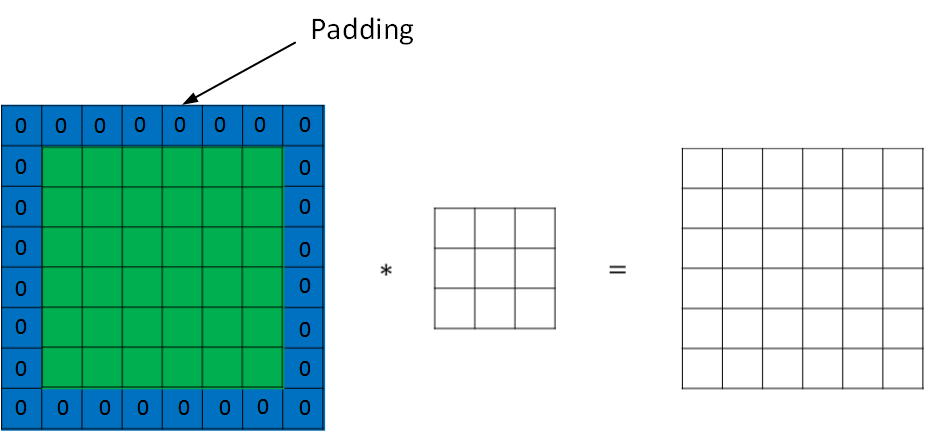
經過padding之後,原始圖片尺寸為(n+2p) x (n+2p),filter尺寸為f x f,則卷積後的圖片尺寸為(n+2p-f+1) x (n+2p-f+1)。若要保證卷積前後圖片尺寸不變,則p應滿足:
沒有padding操作,,我們稱之為“Valid convolutions”;有padding操作,,我們稱之為“Same convolutions”。
5. Strided Convolutions
Stride表示filter在原圖片中水平方向和垂直方向每次的步進長度。之前我們預設stride=1。若stride=2,則表示filter每次步進長度為2,即隔一點移動一次。
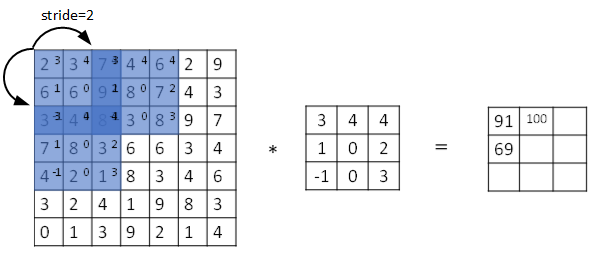
我們用s表示stride長度,p表示padding長度,如果原始圖片尺寸為n x n,filter尺寸為f x f,則卷積後的圖片尺寸為:
上式中,表示向下取整。
值得一提的是,相關係數(cross-correlations)與卷積(convolutions)之間是有區別的。實際上,真正的卷積運算會先將filter繞其中心旋轉180度,然後再將旋轉後的filter在原始圖片上進行滑動計算。filter旋轉如下所示:
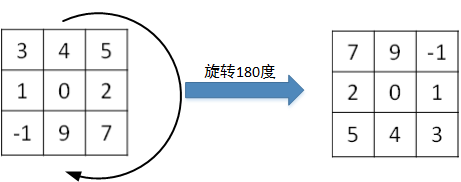
比較而言,相關係數的計算過程則不會對filter進行旋轉,而是直接在原始圖片上進行滑動計算。
其實,目前為止我們介紹的CNN卷積實際上計算的是相關係數,而不是數學意義上的卷積。但是,為了簡化計算,我們一般把CNN中的這種“相關係數”就稱作卷積運算。之所以可以這麼等效,是因為濾波器運算元一般是水平或垂直對稱的,180度旋轉影響不大;而且最終濾波器運算元需要通過CNN網路梯度下降演算法計算得到,旋轉部分可以看作是包含在CNN模型演算法中。總的來說,忽略旋轉運算可以大大提高CNN網路運算速度,而且不影響模型效能。
卷積運算服從結合律:
6. Convolutions Over Volume
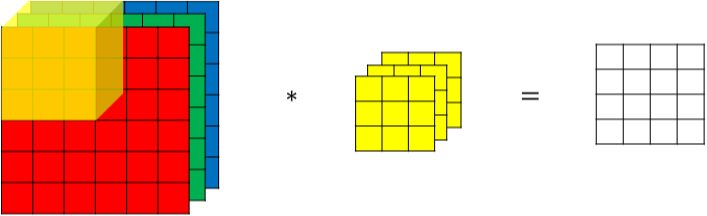
對於3通道的RGB圖片,其對應的濾波器運算元同樣也是3通道的。例如一個圖片是6 x 6 x 3,分別表示圖片的高度(height)、寬度(weight)和通道(#channel)。
3通道圖片的卷積運算與單通道圖片的卷積運算基本一致。過程是將每個單通道(R,G,B)與對應的filter進行卷積運算求和,然後再將3通道的和相加,得到輸出圖片的一個畫素值。
不同通道的濾波運算元可以不相同。例如R通道filter實現垂直邊緣檢測,G和B通道不進行邊緣檢測,全部置零,或者將R,G,B三通道filter全部設定為水平邊緣檢測。
為了進行多個卷積運算,實現更多邊緣檢測,可以增加更多的濾波器組。例如設定第一個濾波器組實現垂直邊緣檢測,第二個濾波器組實現水平邊緣檢測。這樣,不同濾波器組卷積得到不同的輸出,個數由濾波器組決定。
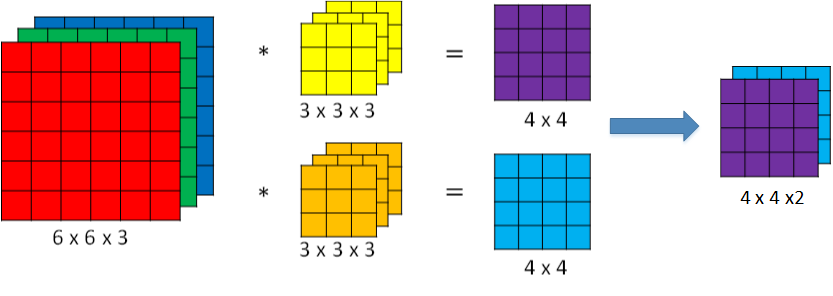
若輸入圖片的尺寸為n x n x ,filter尺寸為f x f x ,則卷積後的圖片尺寸為(n-f+1) x (n-f+1) x 。其中,為圖片通道數目,為濾波器組個數。
7. One Layer of a Convolutional Network
卷積神經網路的單層結構如下所示:
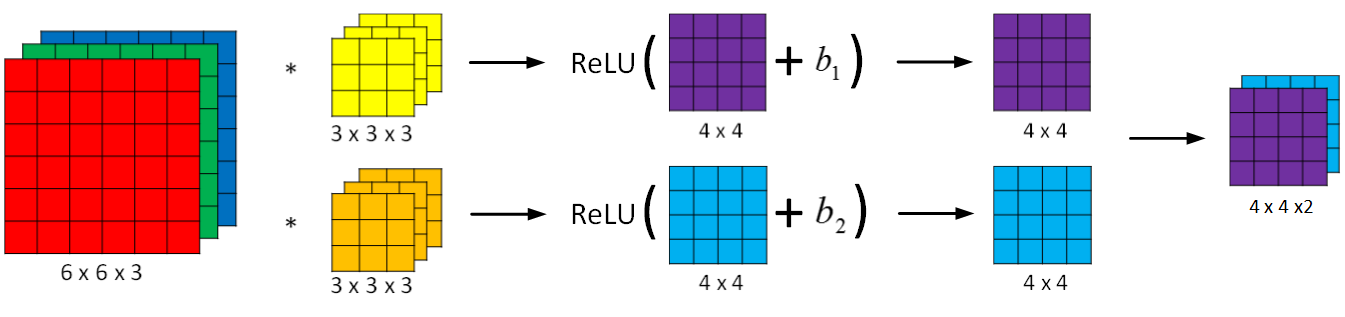
相比之前的卷積過程,CNN的單層結構多了啟用函式ReLU和偏移量b。整個過程與標準的神經網路單層結構非常類似:
卷積運算對應著上式中的乘積運算,濾波器組數值對應著權重,所選的啟用函式為ReLU。
我們來計算一下上圖中引數的數目:每個濾波器組有3x3x3=27個引數,還有1個偏移量b,則每個濾波器組有27+1=28個引數,兩個濾波器組總共包含28x2=56個引數。我們發現,選定濾波器組後,引數數目與輸入圖片尺寸無關。所以,就不存在由於圖片尺寸過大,造成引數過多的情況。例如一張1000x1000x3的圖片,標準神經網路輸入層的維度將達到3百萬,而在CNN中,引數數目只由濾波器組決定,數目相對來說要少得多,這是CNN的優勢之一。
最後,我們總結一下CNN單層結構的所有標記符號,設層數為。
= filter size
= padding
= stride
= number of filters
輸入維度為: x x
每個濾波器組維度為: x