
【影象處理】三種邊緣保持的濾波器(雙邊,引導,加權最小二乘)
從原理上分析,這幾種濾波器沒有太大的差別,都是基於最基本的思想:在梯度比較大的地方(edges)實現preserve,要求儘量不進行平滑,最好是輸出與輸入一樣;而在梯度比較小的地方,儘量的平滑一下,輸入與輸出可以有稍大的不同!那麼從這個原理出發,我們來推導雙邊濾波和引導濾波:
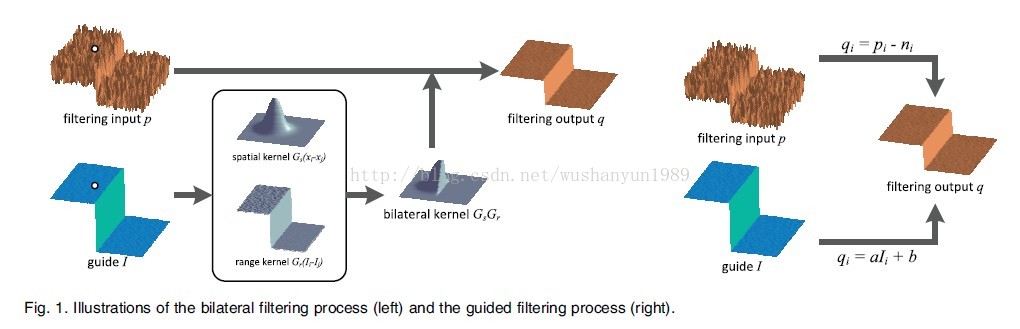
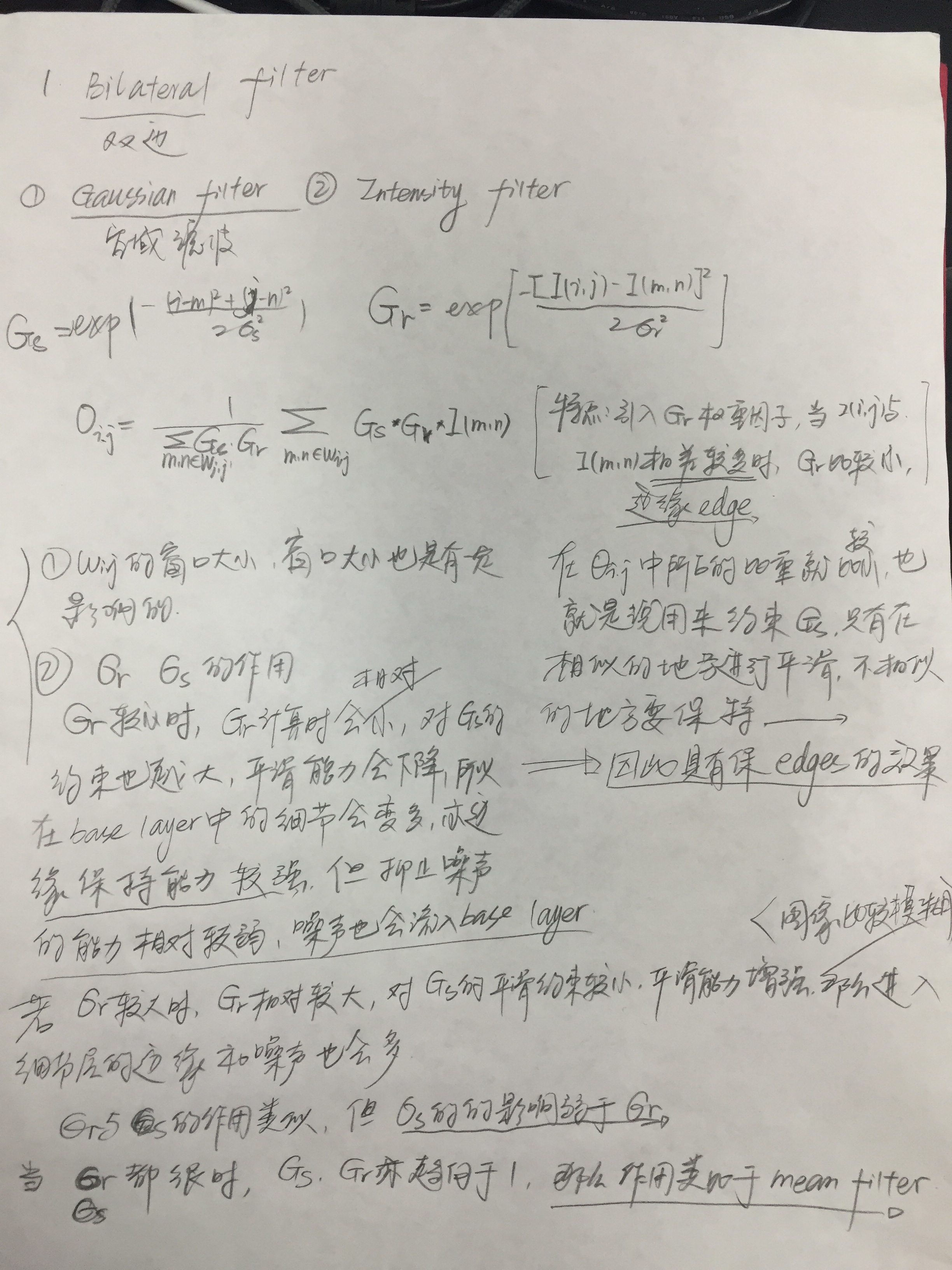
對於雙邊濾波的話,將spatial kernel(也就是gaussian kernel)與range kernel(也就是intensity的相似性權重)分別提取出來,之後合併為bilateral kernel,也就是
對於引導和加權最小二乘,都可以直接從最優化手段入手,只不過表現形式不同而已:
不同在於
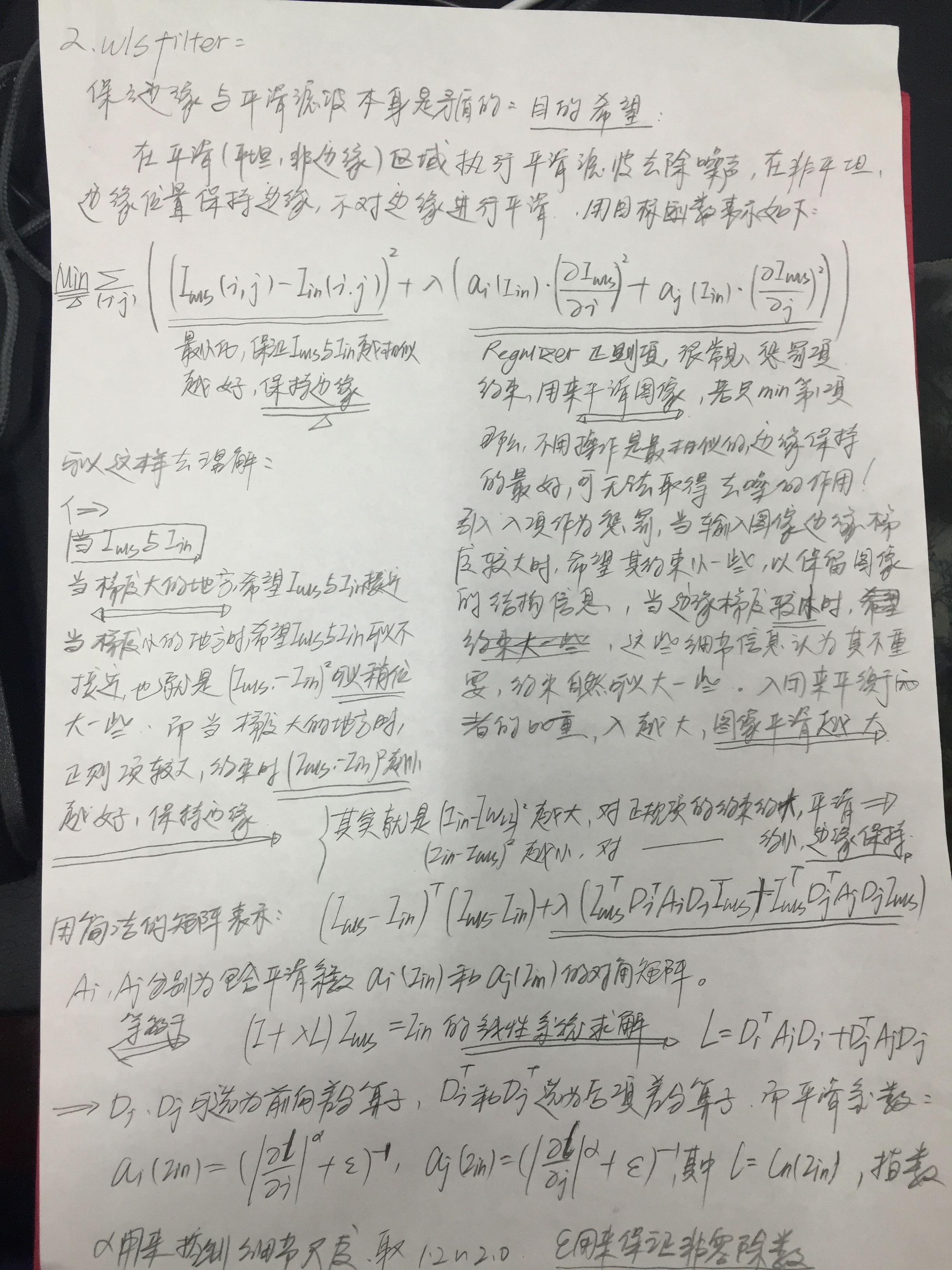
regular item以及加權最小二乘直接使用水平方向和豎直方向的梯度作為正則項,懲罰因子,採用矩陣形式進行描述,然後進行推導得到對應的平滑係數,之後直接得到矩陣求逆運算得到
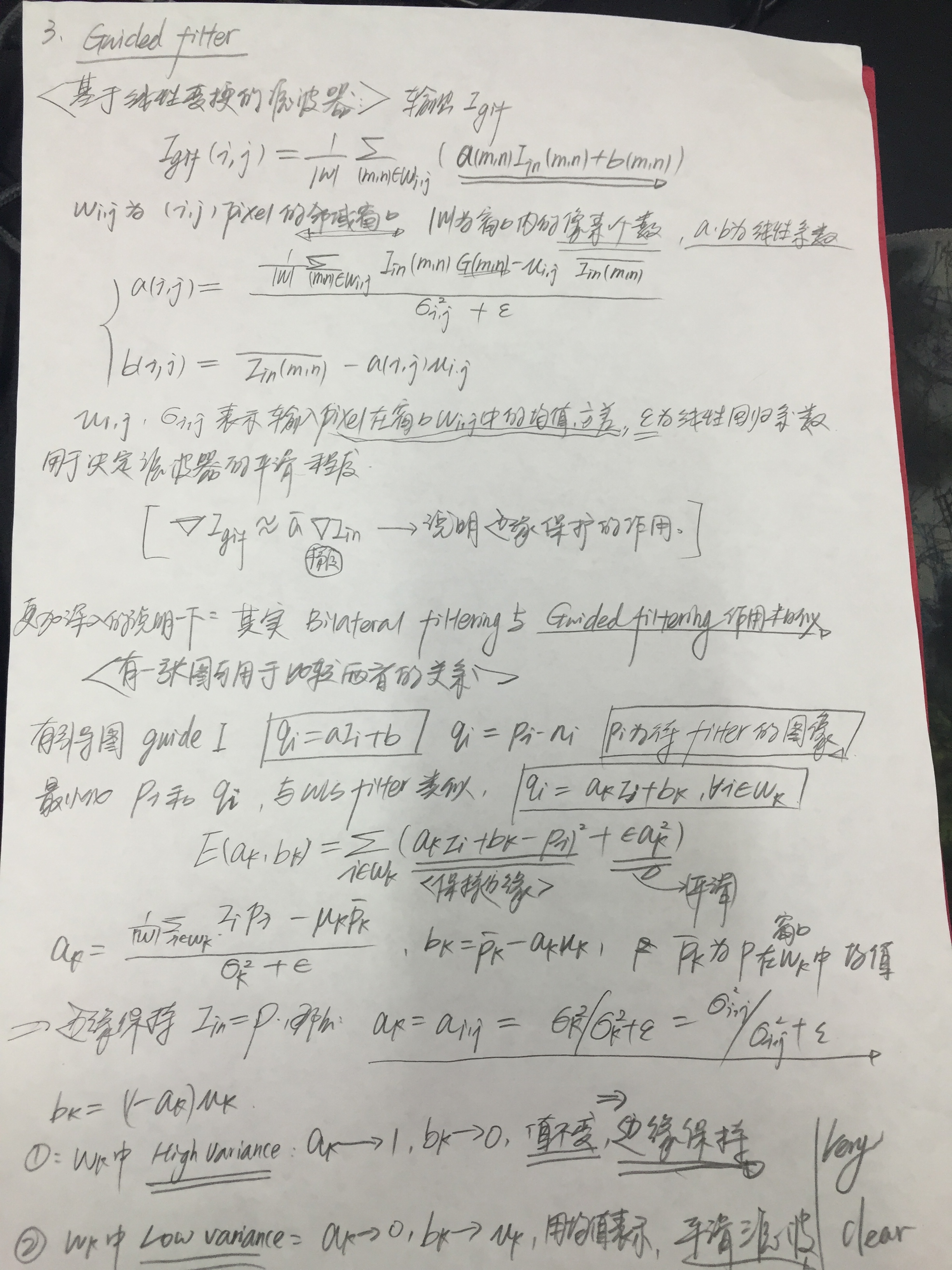
引導濾波器則是用線性表示的方法得到輸出
最後得出的結論從上面總結的可以看出:
(1)High 具體的實現,可以參看對應的程式碼,在E:\LabProject\InfraredImageProcessingAlgorithms中都有相關的參考例子。
2016-7-3 20:51
張朋藝 [email protected]