【L298N 驅動電機的線路連線圖】
----------公司的 掃地機器人 第四章:51微控制器 連線 有刷 直流 電機 驅動模組
---1. 抱怨 網上的資料
首先,在淘寶買了一個L298N的驅動模組,然後 從淘寶店找資料,幾乎所有的淘寶店都是一個 說明書,沒有卵用。後來自己在網上找了好多東西,都沒有什麼用,整個下午就一直在看東西。嘗試了各種方法,最終明白了 它的連線 和工作原理。
---2. 講述自己的實驗過程
測試了很多,還以為是電壓不夠,去買了 4節南孚電池,。順便測試了下 南孚的電壓,如圖:(之前同學買了普通電池,驅動兩個車輪,車輪不會動,後來換了南孚就能行了,也許是電壓不夠,在網上看到說南孚的電壓 在 1.6V--1.8V之間,覺得很驚訝,所以來測試下, 結果 也沒那麼誇張,就是1.5V而已)。
這說明一個問題,就是普通電池 可能連 1.5V都達不到,或者說 電壓不穩定。

---3. 成功的方法::最終測試成功了,但在網上都是講 驅動模組的工作模式,使用的電壓 範圍,並沒有連線圖,只是有引腳的說明。對於我們 小白來說,真的是非常的難受啊。 所以,我把自己測試成功的 連線圖 分享出來,另外分享自己在用的 測試程式, 畢竟萬事開頭難,哥哥 就幫你們開個好頭。
-----3.1 直接用USB 供電的硬體連線圖:
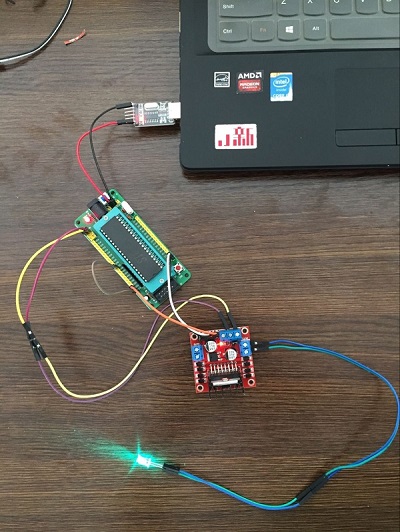
------USB轉TTL 的下載器 給 最小系統 供電,(通電的工作最後再做)
-------最小系統的EA(中斷總開關)連線 VCC引腳,
-------最小系統給 L298N 模組供電,5V輸出 和 GND 分別連線模組的 12V 輸入 和GND,
------- 最小系統的P0.0引腳(經過上拉電阻置位高電平)連線模組的 ENA 引腳,(如果是有跳線的,去掉跳線帽)
------- 最小系統的 P1.0和 P1.1引腳分別 連線 模組的 IN1 和 IN2(此處使用P1.0 和 P1.1 是因為 程式中有用到,程式在文末)
------- 驅動模組的 OUT 1 和 OUT 2 連線led或者步進電機,(其中 OUT 2 是正極)
完成下載程式 和 連線後,按下 最小系統的開關按鈕,首先,最小系統的指示燈會亮,然後 模組的 指示燈會亮 ,然後 模組連線的電機或者led 會有電流,有效果。
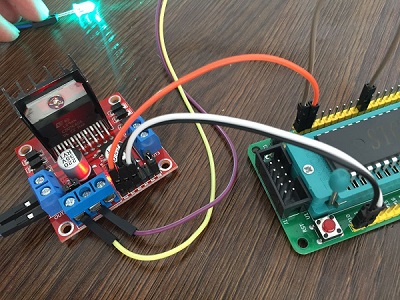
----3.1.1 詳細的 模組與 最小系統的連線 如下圖:
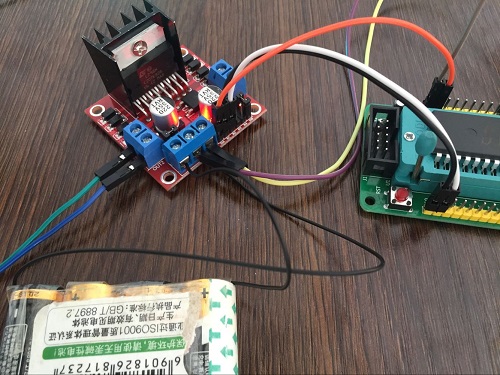
-----3.2 使用電池供電的 硬體 連線圖:
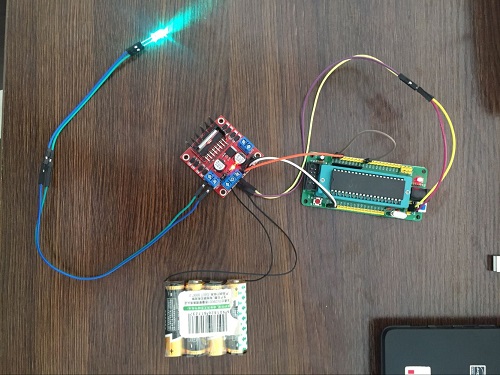
------ 電池組 通過並聯達到 了一定的電壓,分別連線 模組的12V供電引腳和GND引腳(此時的供電電壓為6V,遠遠不夠12V,但是就這麼接既可以,當然 5V也是可以的) (通電的工作最後再做)
-------模組的 5V輸出 和 GND 連線 最小系統的 VCC 和 GND,為 最小系統 供電(此處注意 共用GND 是 非常重要的一點)
------- 最小系統的P0.0引腳(經過上拉電阻置位高電平)連線模組的 ENA 引腳,(如果是有跳線的,去掉跳線帽)
------- 最小系統的 P1.0和 P1.1引腳分別 連線 模組的 IN1 和 IN2(此處使用P1.0 和 P1.1 是因為 程式中有用到,程式在文末)
------- 驅動模組的 OUT 1 和 OUT 2 連線led或者步進電機,(其中 OUT 2 是正極)
程式的燒錄還是需要 USB轉 TTL的下載線 和 串列埠連線的,燒錄完成之後,斷開 最小系統 和 PC的連線,然後 使用電池供電。
最小系統的指示燈 和 模組的 指示燈會亮 ,然後 模組連線的電機或者led 會有電流,有效果。
----3.1.1 詳細的 模組與 最小系統的連線 如下圖:
呢個,就是這樣了。如果在使用的過程中,遇到一些問題,可以交流
部分程式碼展示:
/***************************************************************************
標題:左輪前進
平臺:LY5A-L2B開發板
作者: 林洋電子工作室-微控制器
客服QQ:52927029
郵箱: [email protected]
說明: 本程式主要是用來做接線除錯使用,左輪前進,即前進方向的左邊輪子,
如果實際寫入程式測試電機向後轉(後退),將電機兩線調換一下即可。
******************************************************************************/
//標頭檔案:
#include <reg52.h>
//IO引腳定義:
sbit IN1=P1^0;
sbit IN2=P1^1;
sbit IN3=P1^2;
sbit IN4=P1^3;
//以上為電機驅動板輸入引腳定義,
//IN1和IN2控制左輪電機,輸出對應的OU1和OUT2接左輪電機,
//IN3和IN4控制右輪電機,輸出對應的OU3和OUT4接右輪電機
//巨集定義
#define L_go IN1=0;IN2=1 //左輪前進
#define L_back IN1=1;IN2=0 //左輪後退
#define L_stop IN1=0;IN2=0 //左輪停止,兩個輸出1也可以
#define R_go IN3=0;IN4=1 //右輪前進
#define R_back IN3=1;IN4=0 //右輪後退
#define R_stop IN3=0;IN4=0 //右輪停止,兩個輸出1也可以
//入口函式
void main(void)
{
L_go; //左輪前進
while(1);
}---4. 從中的啟示
特別注意: 輕易別搞 硬體,特別是沒有裝置的情況下,,得買很多東西,而且 買的時候,。你並不知道有沒有用。
遇到問題,不要急,慢慢來,看到一個留了 聯絡方式的部落格,試著聯絡下 博主,也許博主是個熱心腸。、哈哈
下載資源包括:(使用的是STC89C52,一遍通過)