
Stable Platform Systems (穩定平臺系統) Strapdown Systems(捷聯絡統)
阿新 • • 發佈:2019-01-02
幾乎所有的慣導系統分為兩類:穩定平臺慣導系統和捷聯慣導系統。兩個系統的區別在於陀螺儀和加速度計資料的參考座標系之間的差異。
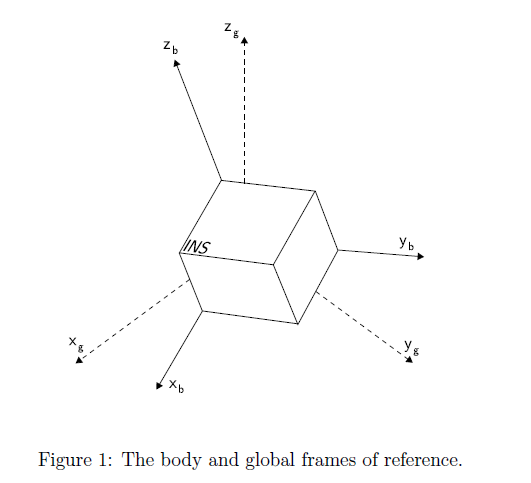
在穩定平臺慣導系統中,穩定平臺的軸座標系是和global frame即全域性座標系統是一致的,而慣性測量單元就是安裝在穩定平臺上,陀螺儀可以檢測到平臺的旋轉,然後這些旋轉訊號反饋到系統的轉矩電機,轉矩電機會旋轉系統的平衡環以抵消掉這些的旋轉,使得穩定平臺和全域性座標系一致。

在穩定平臺系統中,裝置的方向資訊可以直接從系統中讀取,裝置位置的計算需要對平臺上的加速度計通過二次積分獲得(注意,積分前需要從垂直方向上減掉重力加速度)。可以認為慣性測量的資料都是全域性座標系下的資料。
捷聯慣導系統中,慣性測量單元剛性的安裝在裝置上,沒有穩定平臺之說了,因此慣性測量單元的測量資料都是在body frame或者說區域性座標系而不是在全域性座標系下。此時,裝置的方向資訊不能直接從陀螺儀來讀了,而需要整合之前的方向資訊。同樣裝置的位置資訊也要將加速度資料通過整合後的方向資訊轉換到全域性座標系下再積分獲得。
兩個系統的演算法如下圖所示:
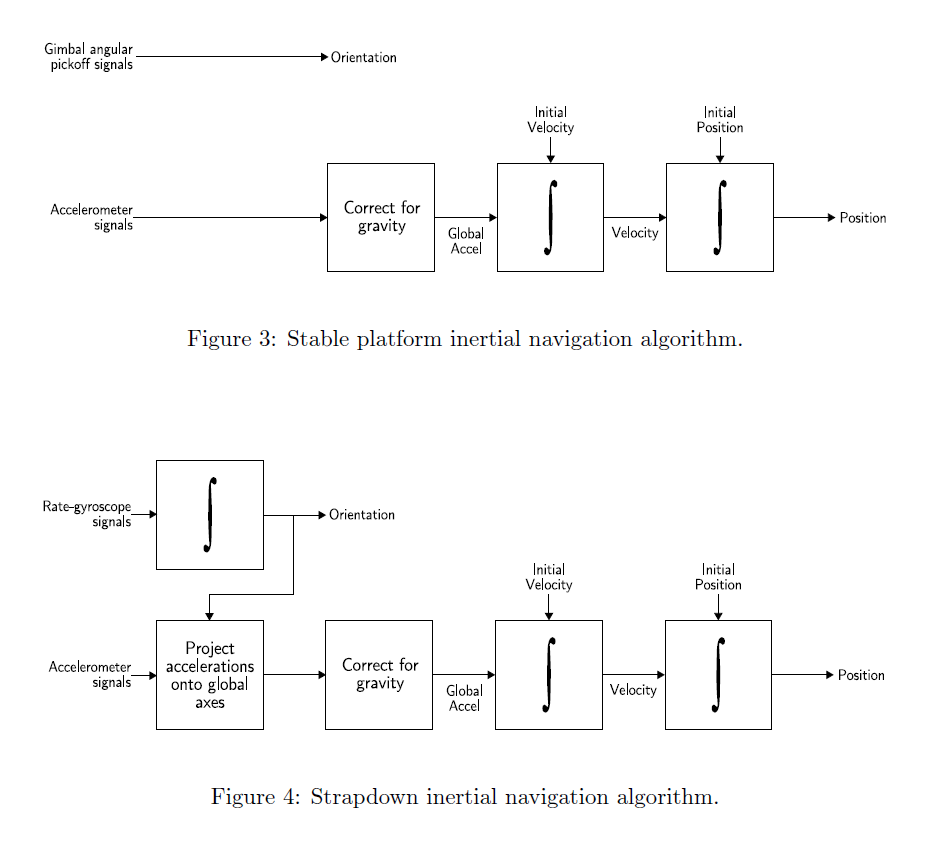
平臺慣導系統的結構比較複雜,體積大,但計算簡單,捷聯絡統簡化了機械結構的複雜性,但是增加了計算複雜度,隨著計算成本的降低,捷聯絡統越來越佔據著主導地位。
本文參考《An introduction to inertial navigation》Oliver J. Woodman