
簡要介紹一下目標檢測的網路,r-cnn, spp-net, fast-rcnn, faster-rcnn
簡要介紹一下目標檢測的網路
(1)R-CNN的原理:先用框把物體找出來,然後將找出來的框放入CNN中進行分類,這就是RCNN的簡單原理。
(2)SPP-net:直接輸入整張圖片,所有區域共享卷積計算。解決了R-CNN中每張圖片都要提取的區域(selective search演算法會提取2000個區域)都要進行卷積計算,計算量太大。引入了空間金字塔池化,為不同尺寸的區域,直接在conv5上輸出提取特徵,對映到固定尺寸的全連線層上。但是引入了一個新的問題,SPP層之前的所有卷積層不能進行fine-tuning,因為引入了SPP(空間金字塔池化),導致梯度回傳困難。
(3) fast-rcnn:在spp-net的基礎上, 引入了兩個新技術,感興趣區域池化層(ROI)和多工損失函式,實現了end—to-end, 所有層都可以fine-tuning
(4)
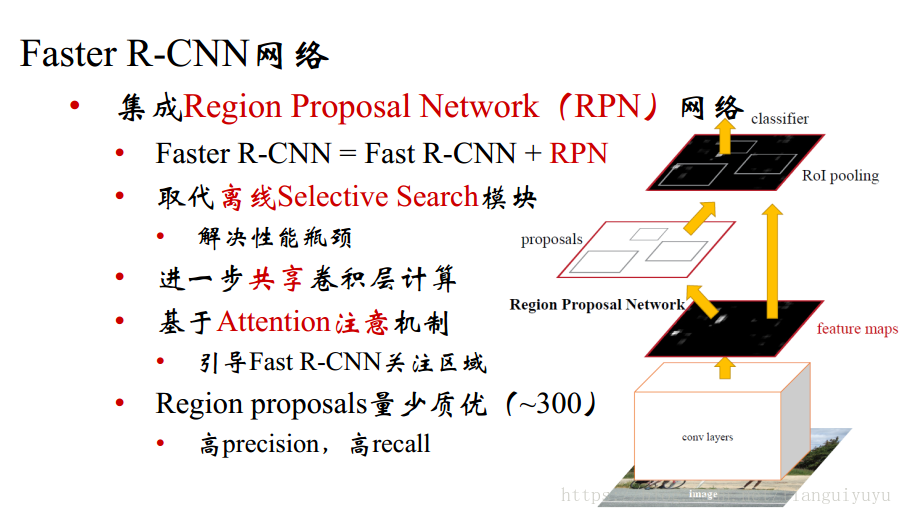
區域推薦中不用selective search演算法了,而是用RPN
相關推薦
簡要介紹一下目標檢測的網路,r-cnn, spp-net, fast-rcnn, faster-rcnn
簡要介紹一下目標檢測的網路 (1)R-CNN的原理:先用框把物體找出來,然後將找出來的框放入CNN中進行分類,這就是RCNN的簡單原理。(2)SPP-net:直接輸入整張圖片,所有區域共享卷積計算。解決了R-CNN中每張圖片都要提取的區域(selective search演算
區域卷積神經網路(R-CNN,SPP-Net,Fast R-CNN,Faster R-CNN)
1 模型進化史 檢測框架可分為兩類: 兩級式檢測框架,包含一個用於區域提議的預處理步驟,使得整體流程是兩級式的,如R-CNN系列 單級式檢測框架,即無區域提議的框架,這是一種單獨提出的方法,不會將檢測提議分開,使得整個流程是單級式的,如YOLO系列
R-CNN,SPP-NET, Fast-R-CNN,Faster-R-CNN, YOLO, SSD, R-FCN系列深度學習檢測方法梳理
注:1.本博文持續更新中,文章較長,可以收藏方便下次閱讀。2.本人原創,謝絕轉載。 1. R-CNN:Rich feature hierarchies for accurate object detection and semantic segmentation 技術路線:selective searc
R-CNN,SPP-NET, Fast-R-CNN,Faster-R-CNN, YOLO, SSD系列深度學習檢測方法梳理
1. R-CNN:Rich feature hierarchies for accurate object detection and semantic segmentation 技術路線:selective search + CNN + SVMs
論文筆記:目標檢測演算法(R-CNN,Fast R-CNN,Faster R-CNN,YOLOv1-v3)
R-CNN(Region-based CNN) motivation:之前的視覺任務大多數考慮使用SIFT和HOG特徵,而近年來CNN和ImageNet的出現使得影象分類問題取得重大突破,那麼這方面的成功能否遷移到PASCAL VOC的目標檢測任務上呢?基於這個問題,論文提出了R-CNN。 基本步驟:如下圖
帶你深入AI(4)- 目標檢測領域:R-CNN,faster R-CNN,yolo,SSD, yoloV2
系列文章,請多關注 Tensorflow原始碼解析1 – 核心架構和原始碼結構 自然語言處理1 – 分詞 帶你深入AI(1) - 深度學習模型訓練痛點及解決方法 帶你深入AI(2)- 深度學習啟用函式,準確率,優化方法等總結 帶你深入AI(3)- 物體分類領域:AlexNet VGG I
【目標檢測】Cascade R-CNN 論文解析
都是 org 檢測 rpn 很多 .org 實驗 bubuko pro 目錄 0. 論文鏈接 1. 概述 @ 0. 論文鏈接 Cascade R-CNN 1. 概述 ??這是CVPR 2018的一篇文章,這篇文章也為我之前讀R-CNN系列困擾的一個問題提供了一個解決方案
基於DL的目標檢測技術:R-CNN、Fast R-CNN、Faster R-CNN
目標檢測:在給定的圖片中精確找到物體所在位置,並標註出物體的類別。 目標檢測=影象識別(CNN)+定位(迴歸問題/取影象視窗) 遇到多物體識別+定位多個物體? 用選擇性搜尋找出可能含有物體的框(候選框)判定得分。這些框之間是可以互相重疊互相包含的,從而避免暴力列舉的所有框了。 1.R
目標檢測論文Cascade R-CNN: Delving into High Quality Object Detection
轉自:https://zhuanlan.zhihu.com/p/36095768 Cascade R-CNN: Delving into High Quality Object Detection 論文連結:https://arxiv.org/abs/1712.00726 程式碼連結:htt
常用目標檢測演算法:R-CNN、Fast R-CNN、Faster R-CNN、YOLO、SSD
一、目標檢測常見演算法 object detection,就是在給定的圖片中精確找到物體所在位置,並標註出物體的類別。所以,object detection要解決的問題就是物體在哪裡以及是什麼的整個流程問題。
目標檢測分割--Mask R-CNN
Mask R-CNN ICCV2017 best paper https://arxiv.org/pdf/1703.06870 Mask R-CNN= Faster R-CNN + FCN, 大致可以這麼理解! 大神都去哪了
深度學習之目標檢測常用算法原理+實踐精講 YOLO / Faster RCNN / SSD / 文本檢測 / 多任務網絡
資源 測試 -h 轉換 條件 評價 框架 檢測方法 結果 深度學習之目標檢測常用算法原理+實踐精講 YOLO / Faster RCNN / SSD / 文本檢測 / 多任務網絡 資源獲取鏈接:點擊這裏 第1章 課程介紹 本章節主要介紹課程的主要內容、核心知識點、課程
目標檢測網路介紹
RCNN:區域性卷積神經網路。 結構分為:候選區域生成(採用selective search方法),特徵提取網路(多個卷積層、relu,以及池化層),分類器(SVM),迴歸修正位置結構(線性脊迴歸器)。 流程為: 先在輸入影象上進行SS,生成多層次的候選區域, 在候選區域
收藏 | 目標檢測網路學習總結(RCNN --> YOLO V3),
來源:知乎 -方宇 編輯 :專知之前總結了一下卷積網路在分類方面的一些網路演變,但是自己做的
Domain Adaptive Faster R-CNN:經典域自適應目標檢測演算法,解決現實中痛點,程式碼開源 | CVPR2018
> 論文從理論的角度出發,對目標檢測的域自適應問題進行了深入的研究,基於H-divergence的對抗訓練提出了DA Faster R-CNN,從圖片級和例項級兩種角度進行域對齊,並且加入一致性正則化來學習域不變的RPN。從實驗來看,論文的方法十分有效,這是一個很符合實際需求的研究,能解決現實中場景多樣
學習筆記-目標檢測、定位、識別(RCNN,Fast-RCNN, Faster-RCNN,Mask-RCNN,YOLO,SSD 系列)
0. 前言 說到深度學習的目標檢測,就要提到傳統的目標檢測方法。 傳統的目標檢測流程: 1)區域選擇(窮舉策略:採用滑動視窗,且設定不同的大小,不同的長寬比對影象進行遍歷,時間複雜度高) 2)特徵提取(SIFT、HOG等;形態多樣性、光照變化多樣性、背景多樣性使得特徵魯棒性差)
深度學習實戰(1)--手機端跑YOLO目標檢測網路(從DarkNet到Caffe再到NCNN完整打通)
深度學習實戰(1)--手機端跑YOLO目標檢測網路(從DarkNet到Caffe再到NCNN完整打通) 這篇算是關鍵技術貼,YOLO是什麼、DarkNet是什麼、Caffe是什麼、NCNN又是什麼…等等這一系列科普這裡就完全不說了,牽扯實在太多,通過其他帖子有一定的積累後,看這
目標檢測網路學習筆記(RCNN-SPPnet-Fast/Faster RCNN)
一 、RCNN:Rich feature hierarchies for accurate object detection and semantic segmentation Tech report (v5) Ross Girshick Jeff Donahue Trev
TX2實現yolov2(目標檢測,計數,訓練自己的資料集)
git clone https://github.com/pjreddie/darknet cd darknet 2.修改Makefile 我們開啟MakeFile檔案: nano Makefile Makefile內容如下(我們
目標檢測網路之 YOLOv3
yolo-idea本文逐步介紹YOLO v1~v3的設計歷程。YOLOv1基本思想YOLO將輸入影象分成SxS個格子,若某個物體 Ground truth 的中心位置的座標落入到某個格子,那麼這個格子就負責檢測出這個物體。yolo-grid-predict每個格子預測B個bounding box及其置信度(c