
linux裝置驅動模型之匯流排、裝置、驅動三者的關係
阿新 • • 發佈:2019-01-03
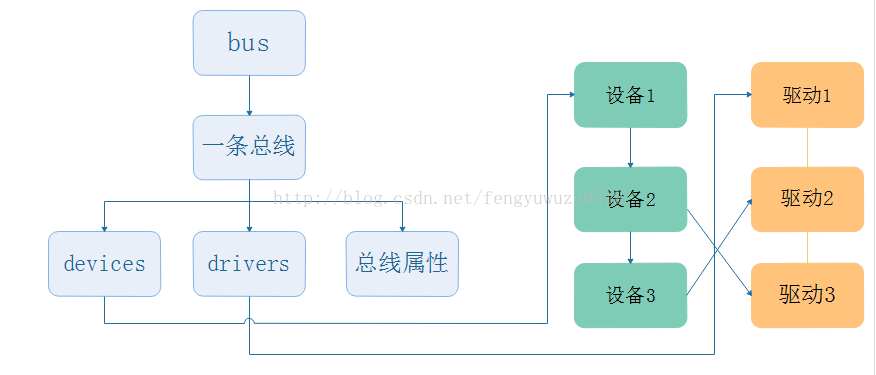
匯流排、裝置、驅動,也就是bus、device、driver,在核心裡都有對應的結構體,在include/linux/device.h 裡定義。
如平臺匯流排
又如平臺驅動的註冊,最終也是呼叫了driver_register
Device.h (linux-3.4.2\include\linux)
1、匯流排、裝置、驅動三者的關係
2、結構體
(1)匯流排結構體
struct bus_type { const char *name; /*匯流排名*/ const char *dev_name; struct device *dev_root; struct bus_attribute *bus_attrs; struct device_attribute *dev_attrs;//裝置屬性 struct driver_attribute *drv_attrs;//驅動屬性 //裝置驅動匹配函式 int (*match)(struct device *dev, struct device_driver *drv); int (*uevent)(struct device *dev, struct kobj_uevent_env *env); int (*probe)(struct device *dev); int (*remove)(struct device *dev); void (*shutdown)(struct device *dev); int (*suspend)(struct device *dev, pm_message_t state); int (*resume)(struct device *dev); const struct dev_pm_ops *pm; struct iommu_ops *iommu_ops; struct subsys_private *p; };
如平臺匯流排
struct bus_type platform_bus_type = {
.name = "platform",
.dev_attrs = platform_dev_attrs,
.match = platform_match,
.uevent = platform_uevent,
.pm = &platform_dev_pm_ops,
};#define bus_register(subsys) \ ({ \ static struct lock_class_key __key; \ __bus_register(subsys, &__key); \ }) int __bus_register(struct bus_type *bus, struct lock_class_key *key) { int retval; struct subsys_private *priv; priv = kzalloc(sizeof(struct subsys_private), GFP_KERNEL); if (!priv) return -ENOMEM; priv->bus = bus; bus->p = priv; BLOCKING_INIT_NOTIFIER_HEAD(&priv->bus_notifier); retval = kobject_set_name(&priv->subsys.kobj, "%s", bus->name); if (retval) goto out; priv->subsys.kobj.kset = bus_kset; priv->subsys.kobj.ktype = &bus_ktype; priv->drivers_autoprobe = 1; retval = kset_register(&priv->subsys); if (retval) goto out; retval = bus_create_file(bus, &bus_attr_uevent); if (retval) goto bus_uevent_fail; priv->devices_kset = kset_create_and_add("devices", NULL, &priv->subsys.kobj); if (!priv->devices_kset) { retval = -ENOMEM; goto bus_devices_fail; } priv->drivers_kset = kset_create_and_add("drivers", NULL, &priv->subsys.kobj); if (!priv->drivers_kset) { retval = -ENOMEM; goto bus_drivers_fail; } INIT_LIST_HEAD(&priv->interfaces); __mutex_init(&priv->mutex, "subsys mutex", key); klist_init(&priv->klist_devices, klist_devices_get, klist_devices_put); klist_init(&priv->klist_drivers, NULL, NULL); retval = add_probe_files(bus); if (retval) goto bus_probe_files_fail; retval = bus_add_attrs(bus); if (retval) goto bus_attrs_fail; pr_debug("bus: '%s': registered\n", bus->name); return 0; bus_attrs_fail: remove_probe_files(bus); bus_probe_files_fail: kset_unregister(bus->p->drivers_kset); bus_drivers_fail: kset_unregister(bus->p->devices_kset); bus_devices_fail: bus_remove_file(bus, &bus_attr_uevent); bus_uevent_fail: kset_unregister(&bus->p->subsys); out: kfree(bus->p); bus->p = NULL; return retval; }
(2)裝置結構體
註冊裝置:struct device { struct device *parent; //指向父裝置的指標 struct device_private *p; struct kobject kobj; //代表自身 const char *init_name; /* initial name of the device */ const struct device_type *type; struct mutex mutex; /* mutex to synchronize calls to * its driver. */ struct bus_type *bus; /* type of bus device is on */ /* 所屬的匯流排 */ struct device_driver *driver; /* which driver has allocated this /* 匹配的驅動*/ device */ void *platform_data; /* Platform specific data, device core doesn't touch it */ struct dev_pm_info power; struct dev_pm_domain *pm_domain; #ifdef CONFIG_NUMA int numa_node; /* NUMA node this device is close to */ #endif u64 *dma_mask; /* dma mask (if dma'able device) */ u64 coherent_dma_mask;/* Like dma_mask, but for alloc_coherent mappings as not all hardware supports 64 bit addresses for consistent allocations such descriptors. */ struct device_dma_parameters *dma_parms; struct list_head dma_pools; /* dma pools (if dma'ble) */ struct dma_coherent_mem *dma_mem; /* internal for coherent mem override */ /* arch specific additions */ struct dev_archdata archdata; struct device_node *of_node; /* associated device tree node */ dev_t devt; /* dev_t, creates the sysfs "dev" */ 裝置號 u32 id; /* device instance */ spinlock_t devres_lock; struct list_head devres_head; struct klist_node knode_class; struct class *class; const struct attribute_group **groups; /* optional groups */ void (*release)(struct device *dev);//所有向核心註冊的裝置都必須有release()方法 };
int device_register(struct device *dev)
{
device_initialize(dev);
return device_add(dev);
}
int device_add(struct device *dev)
{
struct device *parent = NULL;
struct kobject *kobj;
struct class_interface *class_intf;
int error = -EINVAL;
dev = get_device(dev);
if (!dev)
goto done;
if (!dev->p) {
error = device_private_init(dev);
if (error)
goto done;
}
/*
* for statically allocated devices, which should all be converted
* some day, we need to initialize the name. We prevent reading back
* the name, and force the use of dev_name()
*/
if (dev->init_name) {
dev_set_name(dev, "%s", dev->init_name);
dev->init_name = NULL;
}
/* subsystems can specify simple device enumeration */
if (!dev_name(dev) && dev->bus && dev->bus->dev_name)
dev_set_name(dev, "%s%u", dev->bus->dev_name, dev->id);
if (!dev_name(dev)) {
error = -EINVAL;
goto name_error;
}
pr_debug("device: '%s': %s\n", dev_name(dev), __func__);
parent = get_device(dev->parent);
kobj = get_device_parent(dev, parent);
if (kobj)
dev->kobj.parent = kobj;
/* use parent numa_node */
if (parent)
set_dev_node(dev, dev_to_node(parent));
/* first, register with generic layer. */
/* we require the name to be set before, and pass NULL */
error = kobject_add(&dev->kobj, dev->kobj.parent, NULL);
if (error)
goto Error;
/* notify platform of device entry */
if (platform_notify)
platform_notify(dev);
error = device_create_file(dev, &uevent_attr);
if (error)
goto attrError;
if (MAJOR(dev->devt)) {
error = device_create_file(dev, &devt_attr);
if (error)
goto ueventattrError;
error = device_create_sys_dev_entry(dev);
if (error)
goto devtattrError;
devtmpfs_create_node(dev);
}
error = device_add_class_symlinks(dev);
if (error)
goto SymlinkError;
error = device_add_attrs(dev);
if (error)
goto AttrsError;
error = bus_add_device(dev);
if (error)
goto BusError;
error = dpm_sysfs_add(dev);
if (error)
goto DPMError;
device_pm_add(dev);
/* Notify clients of device addition. This call must come
* after dpm_sysfs_add() and before kobject_uevent().
*/
if (dev->bus)
blocking_notifier_call_chain(&dev->bus->p->bus_notifier,
BUS_NOTIFY_ADD_DEVICE, dev);
kobject_uevent(&dev->kobj, KOBJ_ADD);
bus_probe_device(dev);
if (parent)
klist_add_tail(&dev->p->knode_parent,
&parent->p->klist_children);
if (dev->class) {
mutex_lock(&dev->class->p->mutex);
/* tie the class to the device */
klist_add_tail(&dev->knode_class,
&dev->class->p->klist_devices);
/* notify any interfaces that the device is here */
list_for_each_entry(class_intf,
&dev->class->p->interfaces, node)
if (class_intf->add_dev)
class_intf->add_dev(dev, class_intf);
mutex_unlock(&dev->class->p->mutex);
}
done:
put_device(dev);
return error;
DPMError:
bus_remove_device(dev);
BusError:
device_remove_attrs(dev);
AttrsError:
device_remove_class_symlinks(dev);
SymlinkError:
if (MAJOR(dev->devt))
devtmpfs_delete_node(dev);
if (MAJOR(dev->devt))
device_remove_sys_dev_entry(dev);
devtattrError:
if (MAJOR(dev->devt))
device_remove_file(dev, &devt_attr);
ueventattrError:
device_remove_file(dev, &uevent_attr);
attrError:
kobject_uevent(&dev->kobj, KOBJ_REMOVE);
kobject_del(&dev->kobj);
Error:
cleanup_device_parent(dev);
if (parent)
put_device(parent);
name_error:
kfree(dev->p);
dev->p = NULL;
goto done;
}
平臺裝置的註冊,底層也是呼叫device_add()
int platform_device_register(struct platform_device *pdev)
{
device_initialize(&pdev->dev);
arch_setup_pdev_archdata(pdev);
return platform_device_add(pdev);
}int platform_device_add(struct platform_device *pdev)
{
int i, ret = 0;
if (!pdev)
return -EINVAL;
if (!pdev->dev.parent)
pdev->dev.parent = &platform_bus;
pdev->dev.bus = &platform_bus_type;
if (pdev->id != -1)
dev_set_name(&pdev->dev, "%s.%d", pdev->name, pdev->id);
else
dev_set_name(&pdev->dev, "%s", pdev->name);
for (i = 0; i < pdev->num_resources; i++) {
struct resource *p, *r = &pdev->resource[i];
if (r->name == NULL)
r->name = dev_name(&pdev->dev);
p = r->parent;
if (!p) {
if (resource_type(r) == IORESOURCE_MEM)
p = &iomem_resource;
else if (resource_type(r) == IORESOURCE_IO)
p = &ioport_resource;
}
if (p && insert_resource(p, r)) {
printk(KERN_ERR
"%s: failed to claim resource %d\n",
dev_name(&pdev->dev), i);
ret = -EBUSY;
goto failed;
}
}
pr_debug("Registering platform device '%s'. Parent at %s\n",
dev_name(&pdev->dev), dev_name(pdev->dev.parent));
ret = device_add(&pdev->dev);
if (ret == 0)
return ret;
failed:
while (--i >= 0) {
struct resource *r = &pdev->resource[i];
unsigned long type = resource_type(r);
if (type == IORESOURCE_MEM || type == IORESOURCE_IO)
release_resource(r);
}
return ret;
}(3)驅動結構體
struct device_driver {
const char *name; //裝置驅動程式的名字
struct bus_type *bus; //裝置驅動所屬匯流排
struct module *owner; //裝置驅動自身模組
const char *mod_name; /* 驅動模組的名字 */
bool suppress_bind_attrs; /* disables bind/unbind via sysfs */
const struct of_device_id *of_match_table;
int (*probe) (struct device *dev);
int (*remove) (struct device *dev);
void (*shutdown) (struct device *dev);
int (*suspend) (struct device *dev, pm_message_t state);
int (*resume) (struct device *dev);
const struct attribute_group **groups;
const struct dev_pm_ops *pm;
struct driver_private *p;
};int driver_register(struct device_driver *drv)
{
int ret;
struct device_driver *other;
BUG_ON(!drv->bus->p);
if ((drv->bus->probe && drv->probe) ||
(drv->bus->remove && drv->remove) ||
(drv->bus->shutdown && drv->shutdown))
printk(KERN_WARNING "Driver '%s' needs updating - please use "
"bus_type methods\n", drv->name);
other = driver_find(drv->name, drv->bus);
if (other) {
printk(KERN_ERR "Error: Driver '%s' is already registered, "
"aborting...\n", drv->name);
return -EBUSY;
}
ret = bus_add_driver(drv);
if (ret)
return ret;
ret = driver_add_groups(drv, drv->groups);
if (ret)
bus_remove_driver(drv);
return ret;
}又如平臺驅動的註冊,最終也是呼叫了driver_register
int platform_driver_register(struct platform_driver *drv)
{
drv->driver.bus = &platform_bus_type;
if (drv->probe)
drv->driver.probe = platform_drv_probe;
if (drv->remove)
drv->driver.remove = platform_drv_remove;
if (drv->shutdown)
drv->driver.shutdown = platform_drv_shutdown;
return driver_register(&drv->driver);
}