
圖的廣度優先搜尋演算法並生成BFS樹
筆者在前面的兩篇文章中介紹了圖的兩種實現方法:
接下來筆者將介紹圖遍歷演算法,與樹的遍歷類似,圖的遍歷也需要訪問所有頂點一次且僅一次;此外,圖遍歷同時還需要訪問所有的弧一次且僅一次。
圖的遍歷概述
圖的遍歷都可理解為,將非線性結構轉化為半線性結構的過程。經遍歷而確定的弧型別中,最重要的一類即所謂的樹邊,它們與所有頂點共同構成了原圖的一棵支撐樹(森林),稱作遍歷樹(traversal tree)本文要介紹的BFS將是其中的一種。以遍歷樹為背景,其餘各種型別的邊,也能提供關於原圖的重要資訊,比如其中所含的環路等。
圖中頂點之間可能存在多條通路,故為避免對頂點的重複訪問,在遍歷的過程中,通常還要動態地設定各頂點不同的狀態,並隨著遍歷的程序不斷地轉換狀態,直至最後的“訪問完畢”。圖的遍歷更加強調對處於特定狀態頂點的甄別與查詢,故也稱作圖搜尋(graph search)。
與樹遍歷一樣,作為圖演算法基石的圖搜尋,本身也必須能夠高效地實現,如深度優先、廣度優先、最佳優先等基本而典型的圖搜尋,都可以線上性時間內完成。若頂點數和邊數分別為 n 和 e,則這些演算法自身僅需 0 (n + e)時間。
圖的廣度優先搜尋概述
各種圖搜尋之間的區別,體現為邊分類結果的不同,以及所得遍歷樹(森林)的結構差異。其決定因素在於,搜尋過程中的每一步迭代,將依照何種策略來選取下一接受訪問的頂點。
通常,都是選取某個已訪問到的頂點的鄰居。同一頂點所有鄰居之間的優先順序,在多數遍歷中不必講究。因此,實質的差異應體現在,當有多個頂點已被訪問到,應該優先從誰的鄰居中選取下一頂點。比如,廣度優先搜尋(breadth-first search, BFS)採用的策略,可概括為:越早被訪問到的頂點,其鄰居越優先被選用
於是,始自圖中頂點s的BFS搜尋,將首先訪問頂點s;再依次訪問s所有尚未訪問到的鄰居;再按後者被訪問的先後次序,逐個訪問它們的鄰居;…;如此不斷。由於每一步迭代都有一個頂點被訪問,故至多迭代 O (n)步。另一方面,因為不會遺漏每個剛被訪問頂點的任何鄰居,故對於無向圖必能覆蓋 s 所屬的連通分量(connected component),對於有向圖必能覆蓋以 s 為起點的可達分量(reachable component)。倘若還有來自其它連通分量或可達分量的頂點,則再從該頂點出發,重複上述過程。
圖的廣度優先搜尋的程式碼實現
首先來看看再遍歷演算法中節點和弧使用到的屬性:
節點:
private int status = 0; //狀態 0 undiscovered "未發現" 1 discovered "已發現" 2 visited "已完成"
private int parent = -1;弧:
private int type;
//弧型別:0 CROSS 跨邊 1 TREE(支撐樹)
遍歷程式碼
//廣度優先,並生成bfs樹
public void bfsTree(int index) {
this.reload();//復位所有節點和弧的狀態
int v = index;
do {
if(allNodes[v].getStatus() == 0) {
this.bfs(v);
}
}while(index !=(v = (++v%size)));
}
public void bfs(int v) {
Queue<Integer> list = new LinkedList<Integer>();
list.add(v);
allNodes[v].setStatus(1);
while(!list.isEmpty()) {
v = list.poll();
//列舉v的所有鄰居 u
for(int u=0; u<size; u++) {
if(getEdge(v, u)!=null) {
//如果節點i尚未被發現
if(allNodes[u].getStatus() == 0) {
//發現該節點
allNodes[u].setStatus(1);
//並設定支撐樹(index為i的parent)
nodeGraphs[v][u].setType(1);
allNodes[u].setParent(v);
list.add(u);
}else {
//如果節點i已被發現,則將邊index->i 歸為跨邊
nodeGraphs[v][u].setType(0);
}
}
}
//至此,v節點訪問完畢
allNodes[v].setStatus(2);
}
}
//獲取與節點node的相連結的弧,不存在返回false
public Edge getEdge(int start, int end) {
return nodeGraphs[start][end];
}演算法的實質功能,由子演算法 bfs()完成。對該函式的反覆呼叫,即可遍歷所有連通或可達域。仿照樹的層次遍歷,這裡也藉助佇列 list,來儲存已被發現,但尚未訪問完畢的頂點。因此,任何頂點在進入該佇列的同時,都被隨即標為”已發現”狀態。
bfs()的每一步迭代,都先從 list 中取出當前的首頂點 v;再逐一核對其各鄰居 u 的狀態並做相應處理;最後將頂點 v 置為 “訪問完畢” 狀態,即可進入下一步迭代。
若頂點 u 尚處於”未發現”狀態,則令其轉為”已發現” 狀態,並隨即加入佇列 list。實際上,每次發現一個這樣的頂點 u,都意味著遍歷樹可從 v 到 u 拓展一條邊。於是,將邊(v, u)標記為樹邊(tree edge),並按照遍歷樹中的承襲關係,將 v 記作 u 的父節點。
若頂點 u 已處於 “已發現” 狀態(無向圖),或者甚至處於“已完成“ 狀態(有向圖),則意味著邊(v, u)不屬於遍歷樹,於是將該邊歸類為跨邊(cross edge)
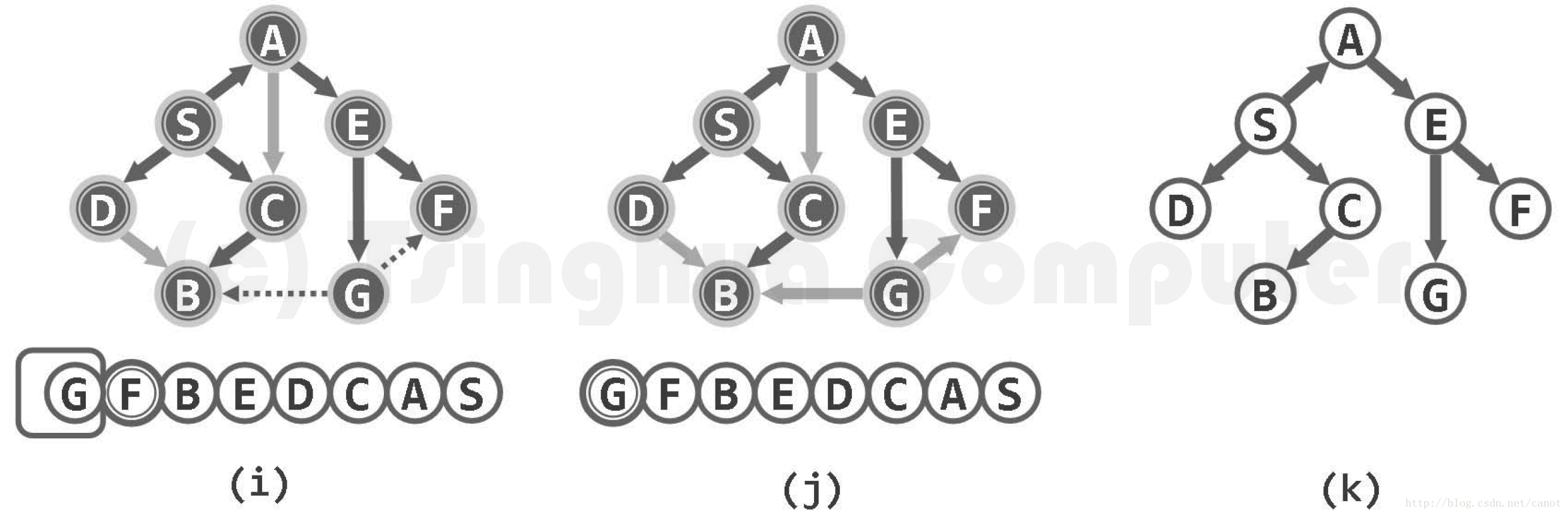
bfs()遍歷結束後,所有訪問過的頂點通過 parent指標依次聯接,從整體上給出了原圖某一連通或可達域的一棵遍歷樹,稱作廣度優先搜尋樹,或簡稱 BFS 樹(BFS tree)。
例項給出了一個
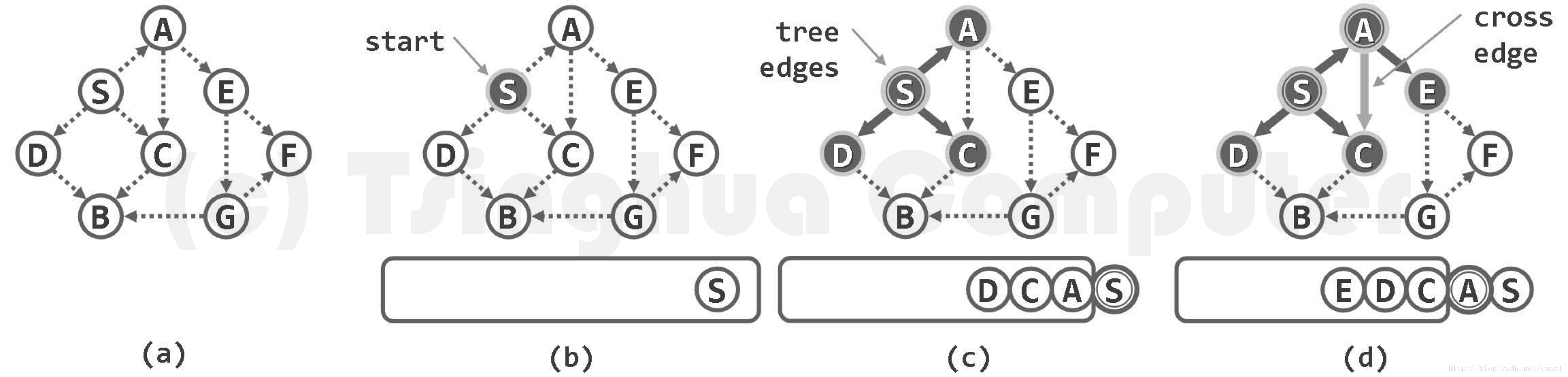
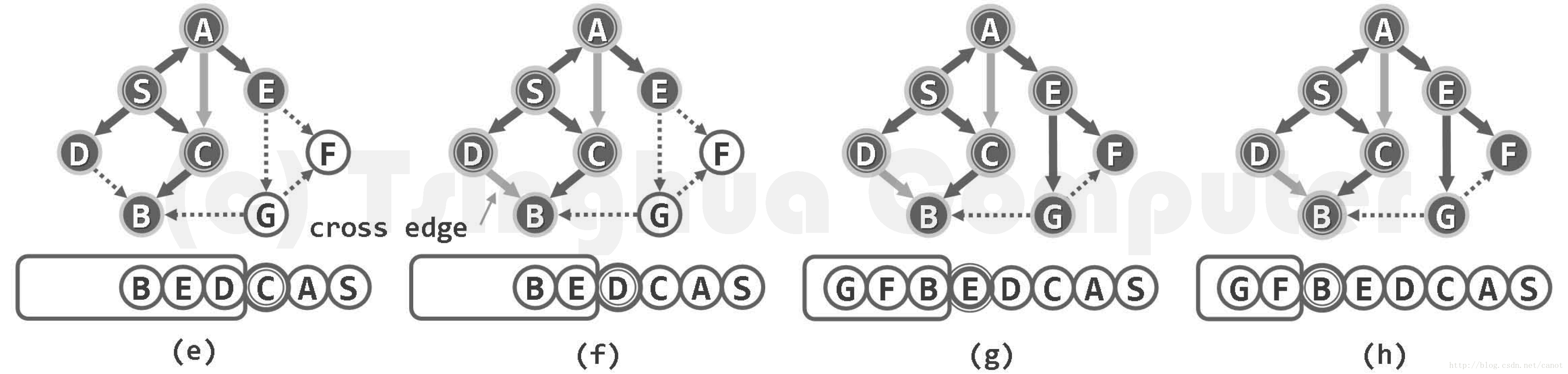
下圖展示了一個含8個頂點和11條邊的有向圖,起始於頂點S的BFS搜尋過程。注意觀察輔助佇列(下方)的演變,頂點狀態的變化,邊的分類與結果,以及BFS樹的生長過程
不難看出,bfs (s)將覆蓋起始項點 s 所屬的連通分量或可達分量,但無法抵達此外的頂點。而上層主函式 bfsTree()的作用,正在於處理多個連通分量或可達分量並存的情況。具體地,在逐個檢查頂點的過程中,只要發現某一頂點尚未被發現,則意味著其所屬的連通分量或可達分量尚未觸及,故可從該頂點出發再次啟動 bfs (),以遍歷其所屬的連通分量或可達分量。如此,各次 bfs()周用所得的 BFS 樹構成一個森林,稱作 BFS 森林。
複雜度
除作為輸入的圖本身外,BFS 搜尋所使用的空間,主要消耗在用於維護頂點訪問次序的輔助佇列、用於記錄頂點和邊狀態的標識位向量,累計 O (n) + O (n) + O (e) = O (n + e)。
時間方面,首先需花費 0 (n + e)時間復位所有頂點和邊的狀態。不計對子函式 bfs()的呼叫,bfsTree()本身對所有項點的列舉共需 0 (n)時間。而在對 bfs()的所有呼叫中,每個頂點、每條邊均只耗費 0 (1)時間,累計 O (n + e)。綜合起來,BFS 搜尋總體僅需 0 (n + e)時間。