Pytorch學習筆記(二)自己載入單通道圖片用作資料集訓練
阿新 • • 發佈:2019-01-05
作者:灰色橡皮擦
pytorch 在torchvision包裡面有很多的的打包好的資料集,例如minist,Imagenet-12,CIFAR10 和CIFAR100。在torchvision的dataset包裡面,用的時候直接呼叫就行了。具體的呼叫格式可以去看文件(目前好像只有英文的)。網上也有很多原始碼。
不過,當我們想利用自己製作的資料集來訓練網路模型時,就要有自己的方法了。pytorch在torchvision.dataset包裡面封裝過一個函式ImageFolder()。這個函式功能很強大,只要你直接將資料集路徑儲存為例如“train/1/1.jpg ,rain/1/2.jpg …… ”就可以根據根目錄“./train”將資料集裝載了。
dataset.ImageFolder(root="datapath", transfroms.ToTensor())首先,還是要用到opencv,用灰度圖開啟一張圖片,省事。
其次,pytorch有自己的numpy轉Tensor函式,直接轉就行了。#讀取圖片 這裡是灰度圖 for item in all_path: img = cv2.imread(item[1],0) img = cv2.resize(img,(28,28)) arr = np.asarray(img,dtype="float32") data_x[i ,:,:,:] = arr i+=1 data_y.append(int(item[0])) data_x = data_x / 255 data_y = np.asarray(data_y)
data_x = torch.from_numpy(data_x)
data_y = torch.from_numpy(data_y)最後就是自己建網路設計引數訓練了,這部分和文件以及github中的差不多,就不贅述了。dataset = dataf.TensorDataset(data_x,data_y) loader = dataf.DataLoader(dataset, batch_size=batchsize, shuffle=True)
下面是整個程式的原始碼,我利用的還是上次的車標識別的資料集,一共分四類,用的是2層卷積核兩層全連線。
原始碼:
# coding=utf-8
import os
import cv2
import numpy as np
import random
import torch
import torch.nn as nn
import torch.utils.data as dataf
from torch.autograd import Variable
import torch.nn.functional as F
import torch.optim as optim
#訓練引數
cuda = False
train_epoch = 20
train_lr = 0.01
train_momentum = 0.5
batchsize = 5
#測試訓練集路徑
test_path = "/home/test/"
train_path = "/home/train/"
#路徑資料
all_path =[]
def load_data(data_path):
signal = os.listdir(data_path)
for fsingal in signal:
filepath = data_path+fsingal
filename = os.listdir(filepath)
for fname in filename:
ffpath = filepath+"/"+fname
path = [fsingal,ffpath]
all_path.append(path)
#設立資料集多大
count = len(all_path)
data_x = np.empty((count,1,28,28),dtype="float32")
data_y = []
#打亂順序
random.shuffle(all_path)
i=0;
#讀取圖片 這裡是灰度圖 最後結果是i*i*i*i
#分別表示:batch大小 , 通道數, 畫素矩陣
for item in all_path:
img = cv2.imread(item[1],0)
img = cv2.resize(img,(28,28))
arr = np.asarray(img,dtype="float32")
data_x[i ,:,:,:] = arr
i+=1
data_y.append(int(item[0]))
data_x = data_x / 255
data_y = np.asarray(data_y)
# lener = len(all_path)
data_x = torch.from_numpy(data_x)
data_y = torch.from_numpy(data_y)
dataset = dataf.TensorDataset(data_x,data_y)
loader = dataf.DataLoader(dataset, batch_size=batchsize, shuffle=True)
return loader
# print data_y
train_load = load_data(train_path)
test_load = load_data(test_path)
class L5_NET(nn.Module):
def __init__(self):
super(L5_NET ,self).__init__();
#第一層輸入1,20個卷積核 每個5*5
self.conv1 = nn.Conv2d(1 , 20 , kernel_size=5)
#第二層輸入20,30個卷積核 每個5*5
self.conv2 = nn.Conv2d(20 , 30 , kernel_size=5)
#drop函式
self.conv2_drop = nn.Dropout2d()
#全連結層1,展開30*4*4,連線層50個神經元
self.fc1 = nn.Linear(30*4*4,50)
#全連結層1,50-4 ,4為最後的輸出分類
self.fc2 = nn.Linear(50,4)
#前向傳播
def forward(self,x):
#池化層1 對於第一層卷積池化,池化核2*2
x = F.relu(F.max_pool2d( self.conv1(x) ,2 ) )
#池化層2 對於第二層卷積池化,池化核2*2
x = F.relu(F.max_pool2d( self.conv2_drop( self.conv2(x) ) , 2 ) )
#平鋪軸30*4*4個神經元
x = x.view(-1 , 30*4*4)
#全連結1
x = F.relu( self.fc1(x) )
#dropout連結
x = F.dropout(x , training= self.training)
#全連結w
x = self.fc2(x)
#softmax連結返回結果
return F.log_softmax(x)
model = L5_NET()
if cuda :
model.cuda()
optimizer = optim.SGD(model.parameters() , lr =train_lr , momentum = train_momentum )
#預測函式
def train(epoch):
model.train()
for batch_idx, (data, target) in enumerate(train_load):
if cuda:
data, target = data.cuda(), target.cuda()
data, target = Variable(data), Variable(target)
#求導
optimizer.zero_grad()
#訓練模型,輸出結果
output = model(data)
#在資料集上預測loss
loss = F.nll_loss(output, target)
#反向傳播調整引數pytorch直接可以用loss
loss.backward()
#SGD重新整理進步
optimizer.step()
#實時輸出
if batch_idx % 10 == 0:
print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(
epoch, batch_idx * len(data), len(train_load.dataset),
100. * batch_idx / len(train_load), loss.data[0]))
#
#測試函式
def test(epoch):
model.eval()
test_loss = 0
correct = 0
for data, target in test_load:
if cuda:
data, target = data.cuda(), target.cuda()
data, target = Variable(data, volatile=True), Variable(target)
#在測試集上預測
output = model(data)
#計算在測試集上的loss
test_loss += F.nll_loss(output, target).data[0]
#獲得預測的結果
pred = output.data.max(1)[1] # get the index of the max log-probability
#如果正確,correct+1
correct += pred.eq(target.data).cpu().sum()
#loss計算
test_loss = test_loss
test_loss /= len(test_load)
#輸出結果
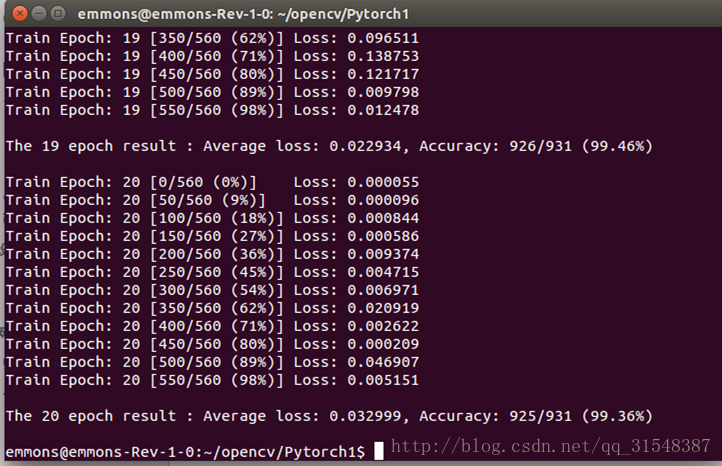
print('\nThe {} epoch result : Average loss: {:.6f}, Accuracy: {}/{} ({:.2f}%)\n'.format(
epoch,test_loss, correct, len(test_load.dataset),
100. * correct / len(test_load.dataset)))
for epoch in range(1, train_epoch+ 1):
train(epoch)
test(epoch)