Android LCD(三):Samsung LCD介面篇
關鍵詞:android LCD控制器Framebuffer PWM
平臺資訊:核心:linux2.6/linux3.0系統:android/android4.0 平臺:samsung exynos 4210、exynos 4412 、exynos 5250
參考:S5PV210顯示驅動分析與移植(android)
這篇文章中轉載的成分比較多,不過大部分內容是從晶片手冊上翻譯過來。Framebuffer部分是黃岡老師--《嵌入式Linux之我行》這一系列部落格中的,嵌入式Linux之我行這系列部落格寫的非常精,我剛學習Linux時經常拜讀他的部落格。這部分內容比較固定,三星的晶片跟新了好多代,不過這部分變化不大,技術是一個積累的過程,感謝那些前輩給我們整理比較好的學習資料,有比較好的技術繼承。
一、 LCD控制器
功能模組的實現其實是晶片裡面集成了一個相應的控制器,比如IIC有IIC控制器,UART有UART控制器等,像其他功能模組一樣LCD也有一個控制器,來實現圖形資訊的處理。LCD控制器可以通過程式設計支援不同LCD屏的要求,例如行和列畫素數,資料匯流排寬度,介面時序和重新整理頻率等。LCD控制器的主要作用,是將定位在系統儲存器中的顯示緩衝區中的LCD影象資料傳送到外部LCD驅動器,併產生必要的控制訊號,例如RGB_VSYNC,RGB_HSYNC, RGB_VCLK
如下圖所示,在Exynos4412規格書中截圖,LCD控制器的構成。

(下面這部分來自網路翻譯,規格書中的描述)
主要由VSFR,VDMA, VPRCS , VTIME和視訊時鐘產生器幾個模組組成:
(1)、VSFR由121個可程式設計控制器組,一套gamma LUT暫存器組(包括64個暫存器),一套i80命令暫存器組(包括12個暫存器)和5塊256*32調色盤儲存器組成,主要用於對lcd控制器進行配置。
(2)、VDMA是LCD專用的DMA傳輸通道,可以自動從系統總線上獲取視訊資料傳送到VPRCS,無需CPU干涉。
(3)、VPRCS收到資料後組成特定的格式(如16bpp或24bpp),然後通過資料介面(
(4)、VTIME模組由可程式設計邏輯組成,負責不同lcd驅動器的介面時序控制需求。VTIME模組產生 RGB_VSYNC, RGB_HSYNC, RGB_VCLK, RGB_VDEN,VEN_VSYNC等訊號。
主要特性:
(1)、支援4種介面型別:RGB/i80/ITU 601(656)/YTU444
(2)、支援單色、4級灰度、16級灰度、256色的調色盤顯示模式
(3)、支援64K和16M色非調色盤顯示模式
(4)、支援多種規格和解析度的LCD
(5)、虛擬螢幕最大可達16MB
(6)、5個256*32位調色盤記憶體
(7)、支援透明疊加
二、介面訊號
FIMD顯示控制器全部訊號定義如下所示
Signal | I/O | Description | LCD Type |
LCD_HSYNC | O | 水平同步訊號 | RGB I/F |
LCD_VSYNC | O | 垂直同步訊號 | |
LCD_VDEN | O | 資料使能 | |
LCD_VCLK | O | 視訊時鐘 | |
LCD_VD[23:0] | O | LCD畫素資料輸出 | |
SYS_OE | O | 輸出使能 | |
VSYNC_LDI | O | Indirect i80介面,垂直同步訊號 | i80 I/F |
SYS_CS0 | O | Indirect i80介面,片選LCD0 | |
SYS_CS1 | O | Indirect i80介面,片選LCD1 | |
SYS_RS | O | Indirect i80介面,暫存器選擇訊號 | |
SYS_WE | O | Indirect i80介面,寫使能訊號 | |
SYS_VD[23:0] | IO | Indirect i80介面,視訊資料輸入輸出 | |
SYS_OE | O | Indirect i80介面,輸出使能訊號 | |
VEN_HSYNC | O | 601介面水平同步訊號 | ITU 601/656 I/F |
VEN_VSYNC | O | 601介面垂直同步訊號 | |
VEN_HREF | O | 601介面資料使能 | |
V601_CLK | O | 601介面資料時鐘 | |
VEN_DATA[7:0] | O | 601介面YUV422格式資料輸出 | |
V656_DATA[7:0] | O | 656介面YUV422格式資料輸出 | |
V656_CLK | O | 656介面資料時鐘 | |
VEN_FIELD | O | 601介面域訊號 |
1、其中主要的RGB介面訊號:
(1)、LCD_HSYNC:行同步訊號,表示一行資料的開始,LCD控制器在整個水平線(整行)資料移入LCD驅動器後,插入一個LCD_HSYNC訊號;
(2)、LCD_VSYNC:幀同步訊號,表示一幀資料的開始,LCD控制器在一個完整幀顯示完成後立即插入一個LCD_VSYNC訊號,開始新一幀的顯示;VSYNC訊號出現的頻率表示一秒鐘內能顯示多少幀影象,稱為“顯示器的頻率”
(3)、LCD_VCLK:畫素時鐘訊號,表示正在傳輸一個畫素的資料;
(4)、LCD_VDEN:資料使能訊號;
(5)、 LCD_VD[23:0]: LCD畫素資料輸出埠
2、RGB訊號的時序
下圖是LCDRGB介面工作時序圖:

(1)、上面時序圖上各時鐘延時引數的含義如下:這些配置可以在LCD規格書中查取
VBPD(vertical back porch):表示在一幀影象開始時,垂直同步訊號以後的無效的行數
VFBD(vertical front porch):表示在一幀影象結束後,垂直同步訊號以前的無效的行數VSPW(vertical sync pulse width):表示垂直同步脈衝的寬度,用行數計算
HBPD(horizontal back porch):表示從水平同步訊號開始到一行的有效資料開始之間的VCLK的個數HFPD(horizontal front porth):表示一行的有效資料結束到下一個水平同步訊號開始之間的VCLK的個數
HSPW(horizontal sync pulse width):表示水平同步訊號的寬度,用VCLK計算
(2)、幀的傳輸過程
VSYNC訊號有效時,表示一幀資料的開始,訊號寬度為(VSPW +1)個HSYNC訊號週期,即(VSPW +1)個無效行;
VSYNC訊號脈衝之後,總共還要經過(VBPD+ 1)個HSYNC訊號週期,有效的行資料才出現;所以,在VSYNC訊號有效之後,還要經過(VSPW +1 + VBPD + 1)個無效的行;
隨即發出(LINEVAL + 1)行的有效資料;
最後是(VFPD + 1)個無效的行;
(3)、行中畫素資料的傳輸過程
HSYNC訊號有效時,表示一行資料的開始,訊號寬度為(HSPW+ 1)個VCLK訊號週期,即(HSPW +1)個無效畫素;
HSYNC訊號脈衝之後,還要經過(HBPD +1)個VCLK訊號週期,有效的畫素資料才出現;
隨後發出(HOZVAL+ 1)個畫素的有效資料;
最後是(HFPD +1)個無效的畫素;
(4)、將VSYNC、HSYNC、VCLK等訊號的時間引數設定好之後,並將幀記憶體的地址告訴LCD控制器,它即可自動地發起DMA傳輸從幀記憶體中得到影象資料,最終在上述訊號的控制下出現在資料匯流排VD[23:0]上。使用者只需要把要顯示的影象資料寫入幀記憶體中。
其實現實的影象有畫素點主城行、行組成場、場組成動畫、動畫疊加也就是3D的出現,也就是我們所說的“點動成線、線動成面、面動成體”。
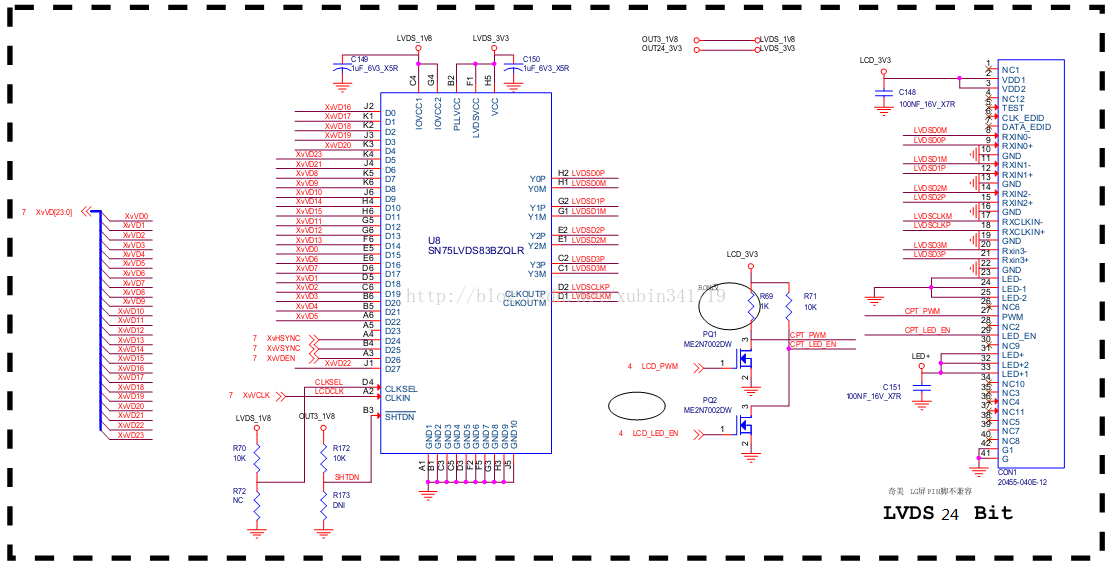
三、LCD的硬體介面
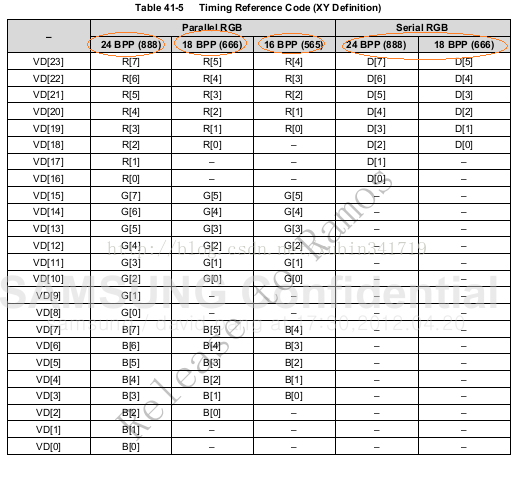
1、16M(24BPP)色的顯示模式
用24位的資料來表示一個畫素的顏色,每種顏色使用8位。 LCD控制器從記憶體中獲得某個畫素的24為顏色值後,直接通過VD[23:0]資料線傳送給LCD;在記憶體中,使用4個位元組(32位)來表示一個畫素,其中的3個位元組從高到低分別表示紅、綠、藍,剩餘的1個位元組無效;
2、64K(16BPP)色的顯示模式
用16位的資料來表示一個畫素的顏色;格式又分為兩種: 5:6:5 ——使用5位來表示紅色,6位表示綠色,5位表示藍色; 5:5:5:1——分別使用5位來表示紅、綠、藍,最後一位表示透明度;3、16BPP
4、serialRGB
不同的BPP接線方式如下所示:
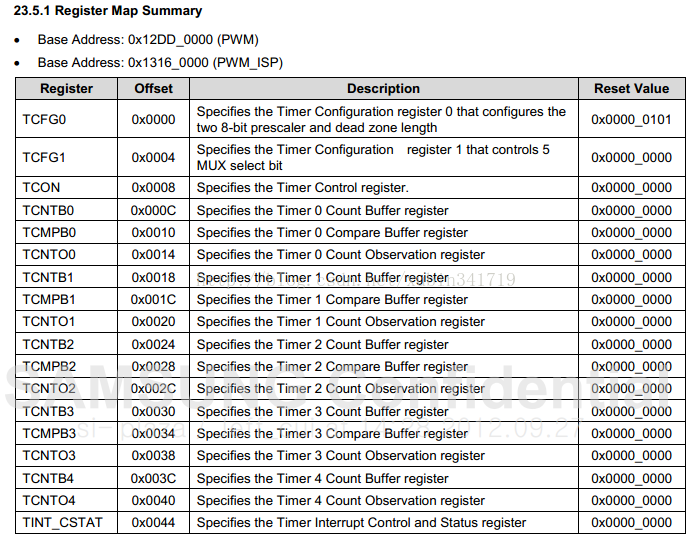
四、暫存器
主要暫存器如下:
VIDCON0:配置視訊輸出格式,顯示使能
VIDCON1:RGB 介面控制訊號
VIDCON2: 輸出資料格式控制
VIDCON3: 影象增強控制
I80IFCONx:i80介面控制訊號
ITUIFCON: ITU介面控制訊號
VIDTCONx:配置視訊輸出時序及顯示大小
WINCONx:每個視窗特性設定
VIDOSDxA,B: 視窗位置設定
VIDOSDxC,D:OSD大小設定
五、Framebuffer驅動部分
這部分是:分析的比較好,我剛學linux的時候就拿個mini2440的板子對著他的部落格練習)。其實這部分也是博主從S3c2440上分析的,三星晶片更新了這麼多代,這塊的原理還是不變的。就像一些協議一樣,這麼多年基本上不會變化,唯一出現的結果就是出來新的介面替代。LCD這塊就是:TTL、LVDS、EDP、MIPI、HDMI等等…………速度更快,接線、PCB走線更簡單,這就是整合化的好處。
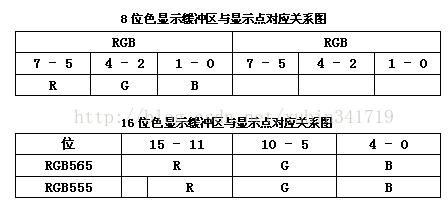
1、簡介
幀緩衝是Linux為顯示裝置提供的一個介面,它把一些顯示裝置描述成一個緩衝區,允許應用程式通過FrameBuffer定義好的介面訪問這些圖形裝置,從而不用去關心具體的硬體細節。對於幀緩衝裝置而言,只要在顯示緩衝區與顯示點對應的區域寫入顏色值,對應的顏色就會自動的在螢幕上顯示。下面來看一下在不同色位模式下緩衝區與顯示點的對應關係:
2、驅動結構
幀緩衝裝置為標準的字元型裝置,在Linux中主裝置號29,定義在/linux/major.h中的FB_MAJOR,次裝置號定義幀緩衝的個數,最大允許有32個FrameBuffer,定義在/include/linux/fb.h中的FB_MAX,對應於檔案系統下/dev/fb%d裝置檔案。
幀緩衝裝置驅動在Linux子系統中的結構如下:

我們從上面這幅圖看,幀緩衝裝置在Linux中也可以看做是一個完整的子系統,大體由fbmem.c和xxxfb.c(對應我們的s3cfb.c)組成。向上給應用程式提供完善的裝置檔案操作介面(即對FrameBuffer裝置進行read、write、ioctl等操作),介面在Linux提供的fbmem.c檔案中實現;向下提供了硬體操作的介面,只是這些介面Linux並沒有提供實現,因為這要根據具體的LCD控制器硬體進行設定,所以這就是我們要做的事情了(即s3cfb.c部分的實現)。
3、資料結構及介面函式
從幀緩衝裝置驅動程式結構看,該驅動主要跟fb_info結構體有關,該結構體記錄了幀緩衝裝置的全部資訊,包括裝置的設定引數、狀態以及對底層硬體操作的函式指標。在Linux中,每一個幀緩衝裝置都必須對應一個fb_info,fb_info在/linux/fb.h中的定義如下:(只列出重要的一些)
struct fb_info {
int node;
int flags;
struct fb_var_screeninfo var;/*LCD可變引數結構體*/
struct fb_fix_screeninfo fix;/*LCD固定引數結構體*/
struct fb_monspecs monspecs; /*LCD顯示器標準*/
struct work_struct queue; /*幀緩衝事件佇列*/
struct fb_pixmap pixmap; /*影象硬體mapper*/
struct fb_pixmap sprite; /*游標硬體mapper*/
struct fb_cmap cmap; /*當前的顏色表*/
struct fb_videomode *mode; /*當前的顯示模式*/
#ifdef CONFIG_FB_BACKLIGHT
struct backlight_device *bl_dev;/*對應的背光裝置*/
struct mutex bl_curve_mutex;
u8 bl_curve[FB_BACKLIGHT_LEVELS];/*背光調整*/
#endif
#ifdef CONFIG_FB_DEFERRED_IO
struct delayed_work deferred_work;
struct fb_deferred_io *fbdefio;
#endif
struct fb_ops *fbops; /*對底層硬體操作的函式指標*/
struct device *device;
struct device *dev; /*fb裝置*/
int class_flag;
#ifdef CONFIG_FB_TILEBLITTING
struct fb_tile_ops *tileops; /*圖塊Blitting*/
#endif
char __iomem *screen_base; /*虛擬基地址*/
unsigned long screen_size; /*LCD IO對映的虛擬記憶體大小*/
void *pseudo_palette; /*偽16色顏色表*/
#define FBINFO_STATE_RUNNING 0
#define FBINFO_STATE_SUSPENDED 1
u32 state; /*LCD的掛起或恢復狀態*/
void *fbcon_par;
void *par;
};
其中,比較重要的成員有struct fb_var_screeninfo var、structfb_fix_screeninfo fix和struct fb_ops *fbops,他們也都是結構體。
fb_var_screeninfo結構體主要記錄使用者可以修改的控制器的引數,比如螢幕的解析度和每個畫素的位元數等,該結構體定義如下:
struct fb_var_screeninfo {
__u32 xres; /*可見螢幕一行有多少個畫素點*/
__u32 yres; /*可見螢幕一列有多少個畫素點*/
__u32 xres_virtual; /*虛擬螢幕一行有多少個畫素點*/
__u32 yres_virtual; /*虛擬螢幕一列有多少個畫素點*/
__u32 xoffset; /*虛擬到可見螢幕之間的行偏移*/
__u32 yoffset; /*虛擬到可見螢幕之間的列偏移*/
__u32 bits_per_pixel; /*每個畫素的位數即BPP*/
__u32 grayscale; /*非0時,指的是灰度*/
struct fb_bitfield red; /*fb快取的R位域*/
struct fb_bitfield green; /*fb快取的G位域*/
struct fb_bitfield blue; /*fb快取的B位域*/
struct fb_bitfield transp; /*透明度*/
__u32 nonstd; /* != 0 非標準畫素格式*/
__u32 activate;
__u32 height; /*高度*/
__u32 width; /*寬度*/
__u32 accel_flags;
/*定時:除了pixclock本身外,其他的都以畫素時鐘為單位*/
__u32 pixclock; /*畫素時鐘(皮秒)*/
__u32 left_margin; /*行切換,從同步到繪圖之間的延遲*/
__u32 right_margin; /*行切換,從繪圖到同步之間的延遲*/
__u32 upper_margin; /*幀切換,從同步到繪圖之間的延遲*/
__u32 lower_margin; /*幀切換,從繪圖到同步之間的延遲*/
__u32 hsync_len; /*水平同步的長度*/
__u32 vsync_len; /*垂直同步的長度*/
__u32 sync;
__u32 vmode;
__u32 rotate;
__u32 reserved[5]; /*保留*/
};
而fb_fix_screeninfo結構體又主要記錄使用者不可以修改的控制器的引數,比如螢幕緩衝區的實體地址和長度等,該結構體的定義如下:
struct fb_fix_screeninfo {
char id[16]; /*字串形式的標示符 */
unsigned long smem_start; /*fb快取的開始位置 */
__u32 smem_len; /*fb快取的長度 */
__u32 type; /*看FB_TYPE_* */
__u32 type_aux; /*分界*/
__u32 visual; /*看FB_VISUAL_* */
__u16 xpanstep; /*如果沒有硬體panning就賦值為0 */
__u16 ypanstep; /*如果沒有硬體panning就賦值為0 */
__u16 ywrapstep; /*如果沒有硬體ywrap就賦值為0 */
__u32 line_length; /*一行的位元組數 */
unsigned long mmio_start; /*記憶體對映IO的開始位置*/
__u32 mmio_len; /*記憶體對映IO的長度*/
__u32 accel;
__u16 reserved[3]; /*保留*/
};
fb_ops結構體是對底層硬體操作的函式指標,該結構體中定義了對硬體的操作有:(這裡只列出了常用的操作)
struct fb_ops {
struct module *owner;
//檢查可變引數並進行設定
int (*fb_check_var)(struct fb_var_screeninfo *var, struct fb_info *info);
//根據設定的值進行更新,使之有效
int (*fb_set_par)(struct fb_info *info);
//設定顏色暫存器
int (*fb_setcolreg)(unsigned regno, unsigned red, unsigned green,
unsigned blue, unsigned transp, struct fb_info *info);
//顯示空白
int (*fb_blank)(int blank, struct fb_info *info);
//矩形填充
void (*fb_fillrect) (struct fb_info *info, const struct fb_fillrect *rect);
//複製資料
void (*fb_copyarea) (struct fb_info *info, const struct fb_copyarea *region);
//圖形填充
void (*fb_imageblit) (struct fb_info *info, const struct fb_image *image);
};
六、Framebuffer設備註冊
S3cfb.c中的s3cfb_probe裝置探測,是驅動註冊的主要函式,
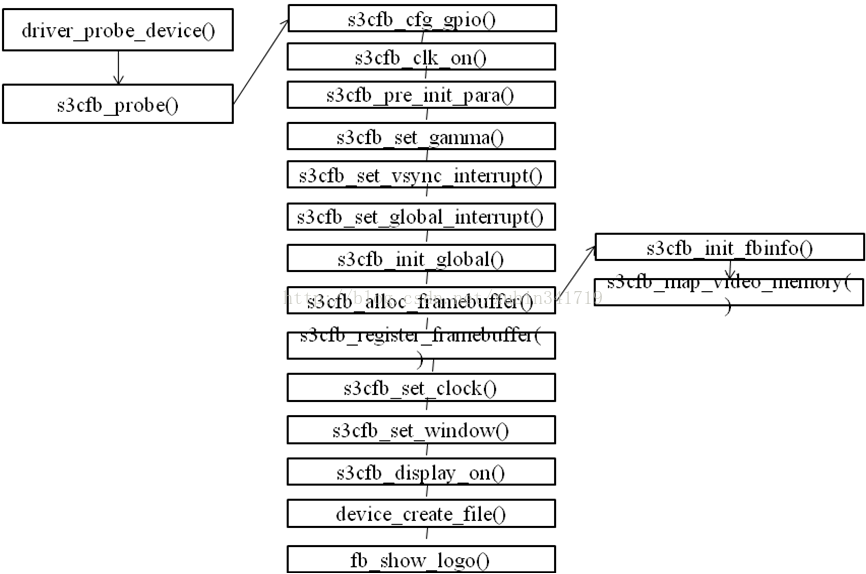
/*定義一個結構體用來維護驅動程式中各函式中用到的變數先別看結構體要定義這些成員,到各函式使用的地方就明白了*/
static int __devinit s3cfb_probe(struct platform_device *pdev)
{
struct s3c_platform_fb *pdata;/*LCD屏配置資訊結構體*/
struct s3cfb_global *fbdev;/*驅動程式全域性變數結構體*/
struct resource *res; /*用來儲存從LCD平臺裝置中獲取的LCD資源*/
int i, j, ret = 0;
printk("%s\n",__func__);
fbdev = kzalloc(sizeof(struct s3cfb_global), GFP_KERNEL);
if (!fbdev) {
dev_err(&pdev->dev, "failed to allocate for "
"global fb structure\n");
ret = -ENOMEM;
goto err_global;
}
fbdev->dev = &pdev->dev;
fbdev->regulator = regulator_get(&pdev->dev, "pd");
if (!fbdev->regulator) {
dev_err(fbdev->dev, "failed to get regulator\n");
ret = -EINVAL;
goto err_regulator;
}
ret = regulator_enable(fbdev->regulator);
if (ret < 0) {
dev_err(fbdev->dev, "failed to enable regulator\n");
ret = -EINVAL;
goto err_regulator;
}
/*獲取LCD引數資訊*/
pdata = to_fb_plat(&pdev->dev);
if (!pdata) {
dev_err(fbdev->dev, "failed to get platform data\n");
ret = -EINVAL;
goto err_pdata;
}
fbdev->lcd = (struct s3cfb_lcd *)pdata->lcd;
/*配置GPIO埠*/
if (pdata->cfg_gpio)
pdata->cfg_gpio(pdev);
/*設定時鐘引數*/
if (pdata->clk_on)
pdata->clk_on(pdev, &fbdev->clock);
/*獲取LCD平臺裝置所使用的IO埠資源,注意這個IORESOURCE_MEM標誌和LCD平臺裝置定義中的一致*/
res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
if (!res) {
dev_err(fbdev->dev, "failed to get io memory region\n");
ret = -EINVAL;
goto err_io;
}
/*申請LCD IO埠所佔用的IO空間(注意理解IO空間和記憶體空間的區別),request_mem_region定義在ioport.h中*/
res = request_mem_region(res->start,
res->end - res->start + 1, pdev->name);
if (!res) {
dev_err(fbdev->dev, "failed to request io memory region\n");
ret = -EINVAL;
goto err_io;
}
/*將LCD的IO端口占用的這段IO空間對映到記憶體的虛擬地址,ioremap定義在io.h中
注意:IO空間要對映後才能使用,以後對虛擬地址的操作就是對IO空間的操作*/
fbdev->regs = ioremap(res->start, res->end - res->start + 1);
if (!fbdev->regs) {
dev_err(fbdev->dev, "failed to remap io region\n");
ret = -EINVAL;
goto err_mem;
}
#ifdef CONFIG_FB_S3C_LTE480WV
/*設定暫存器初始狀態*/
s3cfb_pre_init_para(fbdev);
#endif
/*設定gamma 值*/
s3cfb_set_gamma(fbdev);
/*設定VSYNC中斷*/
s3cfb_set_vsync_interrupt(fbdev, 1);
/*設定全域性中斷*/
s3cfb_set_global_interrupt(fbdev, 1);
/*fb裝置引數資訊初始化*/
s3cfb_init_global(fbdev);
/*為framebuffer分配空間,進行記憶體對映,填充fb_info*/
if (s3cfb_alloc_framebuffer(fbdev)) {
ret = -ENOMEM;
goto err_alloc;
}
/*註冊fb裝置到系統中*/
if (s3cfb_register_framebuffer(fbdev)) {
ret = -EINVAL;
goto err_register;
}
s3cfb_set_clock(fbdev);
s3cfb_set_window(fbdev, pdata->default_win, 1);
s3cfb_display_on(fbdev);
fbdev->irq = platform_get_irq(pdev, 0);
if (request_irq(fbdev->irq, s3cfb_irq_frame, IRQF_SHARED,
pdev->name, fbdev)) {
dev_err(fbdev->dev, "request_irq failed\n");
ret = -EINVAL;
goto err_irq;
}
#ifdef CONFIG_FB_S3C_LCD_INIT
if (pdata->backlight_on)
pdata->backlight_on(pdev);
if (!bootloaderfb && pdata->reset_lcd)
pdata->reset_lcd(pdev);
if (pdata->lcd_on)
pdata->lcd_on(pdev);
#endif
#ifdef CONFIG_HAS_EARLYSUSPEND
fbdev->early_suspend.suspend = s3cfb_early_suspend;
fbdev->early_suspend.resume = s3cfb_late_resume;
fbdev->early_suspend.level = EARLY_SUSPEND_LEVEL_DISABLE_FB;
register_early_suspend(&fbdev->early_suspend);
#endif
/*對裝置檔案系統的支援,建立fb裝置檔案*/
ret = device_create_file(&(pdev->dev), &dev_attr_win_power);
if (ret < 0)
dev_err(fbdev->dev, "failed to add sysfs entries\n");
dev_info(fbdev->dev, "registered successfully\n");
/*顯示開機logo*/
#if !defined(CONFIG_FRAMEBUFFER_CONSOLE) && defined(CONFIG_LOGO)
if (fb_prepare_logo( fbdev->fb[pdata->default_win], FB_ROTATE_UR)) {
printk("Start display and show logo\n");
/* Start display and show logo on boot */
fb_set_cmap(&fbdev->fb[pdata->default_win]->cmap, fbdev->fb[pdata->default_win]);
fb_show_logo(fbdev->fb[pdata->default_win], FB_ROTATE_UR);
}
#endif
return 0;
}
七、如何閱讀LCD規格書
首先我們除錯LCD的時候要獲得的一些引數,沒必要把整個規格書通讀一遍,我剛開始除錯屏的時候拿到一個規格書不知道從何入手,也不知那些引數有用,比較模糊,其實只提取一些有用的資訊就可以,下面這些對初學者也許有點用處。
1、GeneralSpecification
尺寸、解析度、位數、色彩、畫素時鐘頻率、介面型別
(1)、尺寸:

(2)、解析度:1920 1200;

(3)、介面:雙通道LVDS;

(4)、色彩:16.7M,這裡可以確認資料位數8bitRGB三色:3*8=24,2的24次方=16.7M
6bitRGB 三色:3*6=18,2的18次方=262 144;
所以當看到色彩是1.7M是,說明LCD是24bit的,如果是262 144說明LCD是18bit的。

2、Timing Characteristics
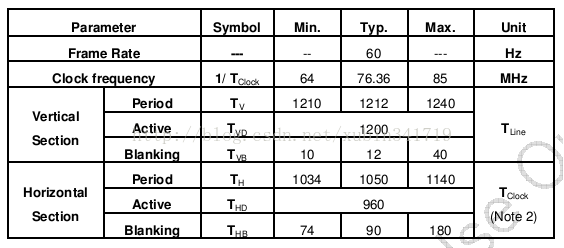
(1)、Frame rate :是60HZ,也就是幀率;
(2)、clock frequency:畫素時鐘,這裡面有最大值、中間值和最小值,這個屏預設值為:76.36MHz;
(3)、Vertical Seciton:VSWidth +Back Porc+Front Porch,前間距、後間距。這個我們再RGB訊號哪裡詳細解釋,這個我們前面有說過;
(4)、Horizontal Section:HS Width +Back Porc+Front Porch,這個跟VS的Porch相同。
3、LCD Timing diagram訊號時序圖,如下所示
有些讀者會問,為什麼沒有行、場、資料等訊號。其實這個是LVDS訊號的時序,這個根據屏廠的習慣,有的畫的是LVDS輸入的訊號時序,有的是TTL(RGB)的時序。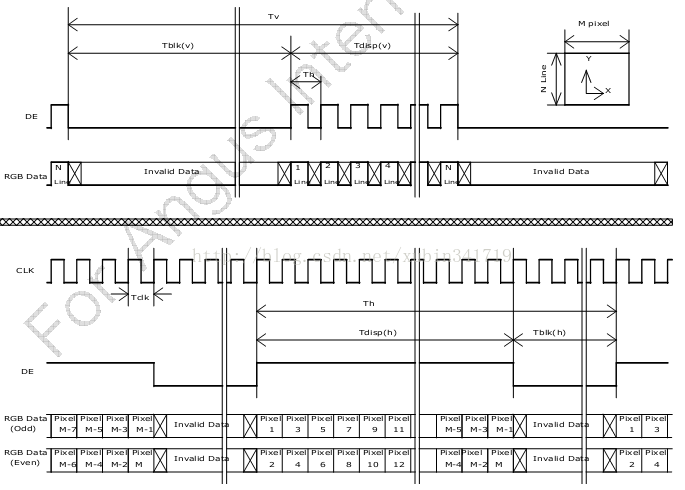
上面我們以一個例子說明,做驅動的(軟體方面)要知道的一些引數,如果是硬體方面的問題,可以再對一下介面。其實一個LCD規格書要了解的也就這麼多,除錯軟體就夠用:
(1)、General Specification中可得到,尺寸、解析度、位數、色彩、畫素時鐘頻率、介面型別;
(2)、Timing Characteristics中可以得到一些具體的引數;
(3)、LCD Timing diagram訊號時序圖,可以看到一些訊號的時序、極性等;
八、PWM概述
1、先解釋兩個名詞:
PWM:脈衝寬度調製(PWM),是英文“Pulse WidthModulation”的縮寫,簡稱脈寬調製。
佔空比:佔空比(DutyRation)在電信領域中有如下含義:
在一串理想的脈衝週期序列中(如方波),正脈衝的持續時間與脈衝總週期的比值。例如:(假設脈衝為3V)
脈衝寬度 1μs,訊號週期4μs的脈衝序列佔空比為0.25,平均電壓為:3*0.25=0.75V;
脈衝寬度 0μs,訊號週期4μs的脈衝序列佔空比為0,平均電壓為:0V;
脈衝寬度 4μs,訊號週期4μs的脈衝序列佔空比為1,平均電壓為:3V;
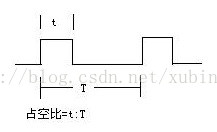
平均電壓的變化成階梯型變化,如果T足夠小,成線性。
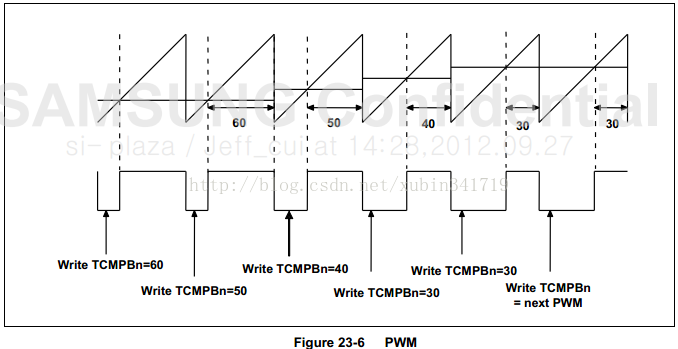
看下晶片片規格書中的描述:暫存器填不同值是,脈衝寬度不一樣。
2、samusng 中的PWM控制器

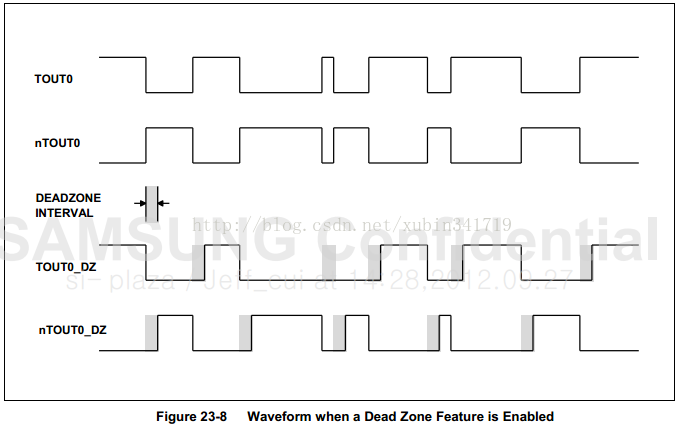
PWM時鐘分頻。跟微控制器裡面的有點像。死區控制器:這個是根據電晶體的特性,設定這個功能的,不過我工作中還沒有用到死區控制這塊。瞭解有這個概念。
看這些暫存器,記得用MINI2440寫裸機程式的時候,直接寫這些暫存器,記得上學時把s3c2440當微控制器玩,有點浪費。學生時代,已經逝去的青春??